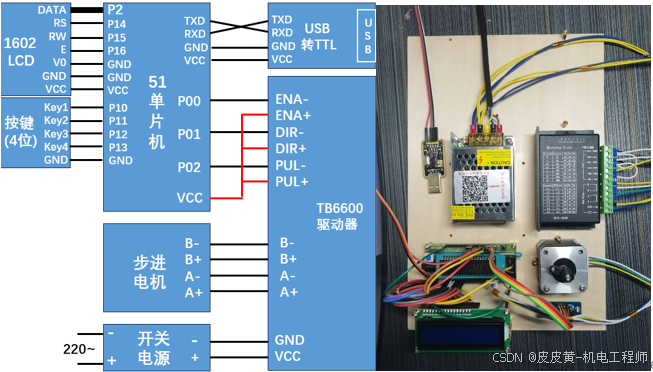
第三节、电机定速转动【51单片机-TB6600驱动器-步进电机教程】
摘要:本节介绍用定时器定时的方式,精准控制脉冲时间,从而控制步进电机速度
一、计算过程
1.1 电机每一步的角速度等于走这一步所花费的时间,走一步角度等于步距角,走一步的时间等于一个脉冲的时间
w
=
s
t
e
p
t
…
…
①
w=\frac{step}{t} ……①
w=tstep……①
w:角速度(°/s)
step:步距角(°)
t:脉冲时间(s)
1.2 TB6600及其他驱动器大多具有细分功能,考虑细分X之后,一个脉冲转动的角度为step/X,带入①式:
w
=
s
t
e
p
t
∗
X
…
…
②
w=\frac{step}{t*X} ……②
w=t∗Xstep……②
X:驱动器细分(X=1,2,4,8,16,32……)
1.3 电机速度通常使用单位为转速RPM(转/分),角速度(°/S)与转速之间的转换关系:
w
=
6
∗
n
…
…
③
w=6*n ……③
w=6∗n……③
t = s t e p 6 ∗ n ∗ X … … ④ t=\frac{step}{6*n*X} ……④ t=6∗n∗Xstep……④
n:转速(RPM)
至此得到了步进电机一个脉冲的时间t
1.4 采用51单片机16位溢出定时器的模式去定时,可以得到:
C
=
65536
−
t
∗
X
t
a
l
12
…
…
⑤
C=65536-t*\frac{Xtal}{12} ……⑤
C=65536−t∗12Xtal……⑤
C:16位溢出定时器初值
Xtal:晶振频率
1.5 将④带入⑤可得:
C
=
65536
−
s
t
e
p
∗
X
t
a
l
72
∗
X
∗
n
…
…
⑥
C=65536-\frac{step*Xtal}{72*X*n}……⑥
C=65536−72∗X∗nstep∗Xtal……⑥
1.6 对于二相步进电机步距角为step=1.8°,带入之后可得:
C
=
65536
−
X
t
a
l
40
∗
X
∗
n
…
…
⑦
C=65536-\frac{Xtal}{40*X*n}……⑦
C=65536−40∗X∗nXtal……⑦
至此得到了转速n与定时初值C的函数关系
二、举例计算
步进电机使用二相四线电机,驱动器细分值设定为2,单片机晶振频率为12000000,设定转速为100RPM,带入⑦可得:
C
=
65536
−
12000000
40
∗
2
∗
100
=
64036
C=65536-\frac{12000000}{40*2*100} =64036
C=65536−40∗2∗10012000000=64036
定时器0初值高8位TH0= C/256=0XFA
定时器0初值低8位TL0= C%256=0X24
三、测试
烧录hex文件后,单片机上电,电机会以100RMP速度匀速转动

四、功能扩展
扩展1
① 增加4个按键,控制电机启停、方向、速度加减
② 增加数码管,显示信息

扩展2
① 增加4个按键,控制电机启停、方向、速度加减
② 增加1602LCD,显示信息
五、总结
至此一个基本的电机定速驱动程序完成,通过调整定时时间,可以精确调整电机的转速
此种方式利用定时器精确定时能力,从而控制电机转速,是后续电机加减速运动的理论基础
五、附件
Hex测试程序请见百度网盘
链接: https://pan.baidu.com/s/1zk3TdaNJpOl2xjSGP3J4-A
提取码: ev4a
Keil源码请见某宝,搜索:【皮皮黄步进电机】
↓↓↓点击下方【目录】,查看本系列全部文章
原文地址:https://blog.csdn.net/LuDanTongXue/article/details/134044141
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!