为自动驾驶提供高分辨率卫星图像数据,实例级标注数据集OpenSatMap
对于交通控制、自动驾驶等任务来说,大规模的高分辨率与更新频率的地图至关重要。现有的地图构建方法多依赖地面采集数据,这种方法的精度固然较高,但在覆盖范围、更新频率却存在限制,测绘成本也相当高昂。
相比之下,使用卫星图像构建地图显然在覆盖范围和构建效率方面具有更大优势。只是不可避免的,卫星图像数据集的分辨率与精度普遍较低,常见的 19 级卫星图像的分辨率为每像素 30 厘米,几乎无法辨认出 20 厘米宽的车道线。因此,现有的卫星图像数据集很难有效支持现代城市复杂道路结构的精细化解析和地图构建。此前,已经有一部分方法在尝试解决这一问题,比较有代表性的有 MIT 团队此前提出的 RoadTracer,它利用迭代图构造方式检测卫星影像中的路网,提高了测绘的准确率,但依然有所不足。
现有数据集的图像分辨率最高仅为 0.3 米/像素,不足以准确感知车道线,无法满足精细化需求。此外,标注不够精细、数据规模小、与自动驾驶数据集不匹配等,也是它们存在的局限。
在此背景下,中国科学院自动化研究所等机构与腾讯地图合作推出了一种名为 OpenSatMap 的细粒度、高分辨率卫星数据集,旨在解决目前基于卫星图像的地图构建过程中遇到的精度和数据量问题。
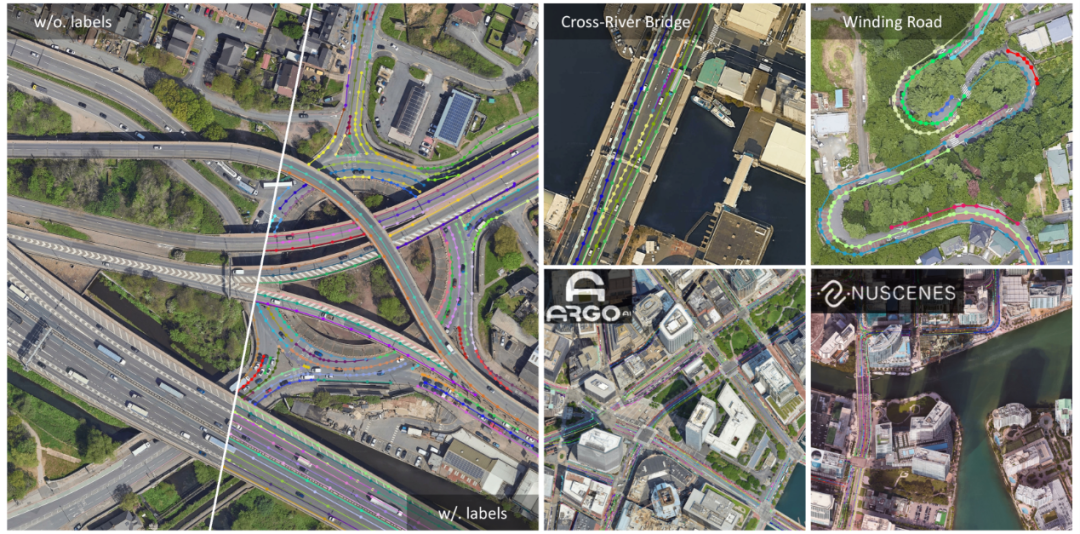
OpenSatMap 数据集的演示(来源:arXiv)
OpenSatMap 的数据主要通过 Google Maps 的静态 API 进行采集。团队根据各地的地理分布,选择了全球 60 座城市、19 个国家中的代表性位置,涵盖了不同的道路类型、地理特征和交通规则,共 38,000 多张 1024×1024 分辨率的卫星影像,并标注了近 45 万个实例。这使得 OpenSatMap 成为当前规模最大、覆盖最广的高分辨率卫星影像数据集之一。
并且,为了提高精度,研究团队收集了数据分辨率为 0.15 米/像素(Level-20)的图像,这是当前所有公开数据集中最高的分辨率。在部分区域无法获取 Level-20 分辨率的情况下,团队会选取 Level-19 影像(0.3 米/像素)作为补充。
在数据标注阶段,团队雇用了 50 名遥感影像标注员和 7 名质检员,采用实例级的标注方式对图像中的道路进行详细的标记。每条道路线(包括车道线、路缘线和虚拟线等)被向量化为折线(polyline)形式,以确保准确表示线条的曲率和方向。
此外,每条线条被分配了八个属性,包括颜色(如白色或黄色)、线型(如实线或虚线)、功能(如停车区域或公交车专用道)、双向属性、边界标记、遮挡情况和清晰度等。这些属性标注通过实例间属性变化(如实线转虚线、双车道变单车道等)实现不同实例的划分,从而更精准地表达复杂路况。
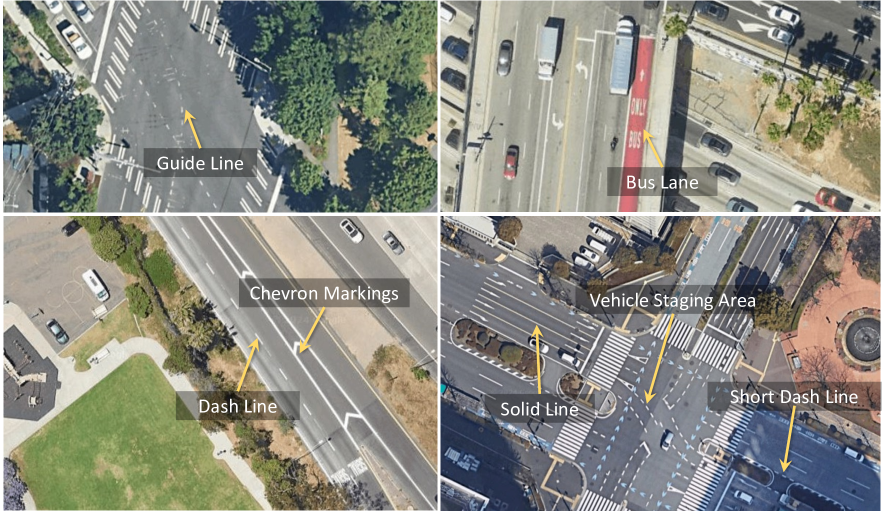
标注示例(来源:arXiv)
标注过程中还特别考虑了遮挡情况,如遮挡、分叉和多层立交桥等,确保图像细节的准确性。特别是对于遮挡情况,团队根据不同遮挡程度将其分为无遮挡、部分遮挡和完全遮挡三类标注,并制定了严格的标注规则,以保证数据集的完整性和一致性。
为了验证 OpenSatMap 在实例级线条检测任务中的有效性,研究团队开发了一个简单的基线方法,针对平均交并比(mIoU)和平均精度(AP)指标进行了评估。结果表明,实例级线条检测比传统的语义分割要困难得多。
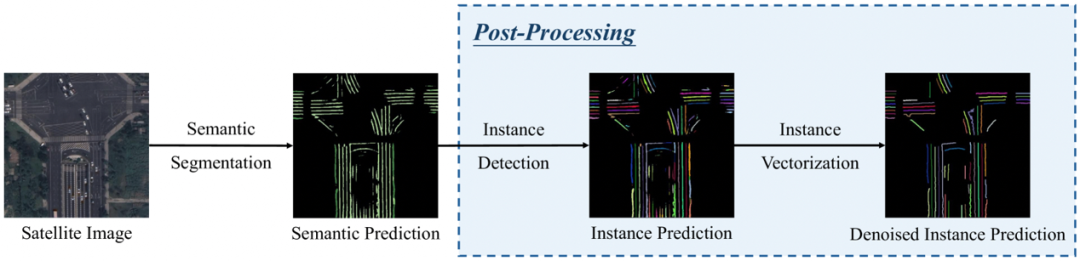
团队所采用的基线方法(来源:arXiv)
在语义级别的评估中,基线模型的平均交并比表现相对较高,但在实例级检测中,AP 和 mIoU 指标的得分较低,尤其是在复杂的路况下,如线条类型变化和线条分叉合并的情况等。其原因在于,实例级检测需要识别带有精细属性的道路元素,而语义分割只涉及一些基础的类别。
虽然从视觉效果上来说,基线模型能够相对准确地预测线条实例。然而,由于一些线条细节无法精确检测(例如线条边缘的定义不清晰、线条连接处的错误分割等),导致 AP 指标相对较低。
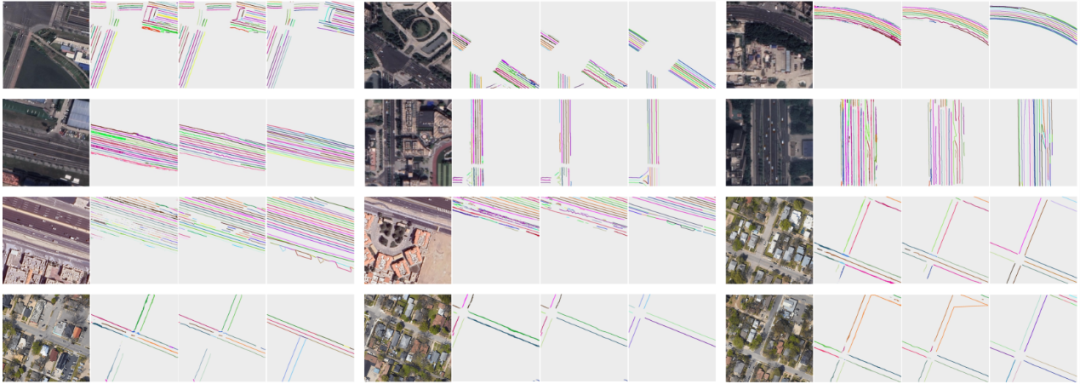
OpenSatMap19(前两行)和 OpenSatMap20(后两行)测试分割的定性结果。对于每个场景,从左到右分别是(a)输入图像、(b)实例预测、(c)去噪实例预测和(d)注释。这些结果表明,该基准本身具有较高的难度,这有助于推动更有效的端到端方法的探索。
值得一提的是,为了确保其在自动驾驶领域的实用性,OpenSatMap 还与 nuScenes 和 Argoverse 2 等主流自动驾驶数据集进行了对齐,使其能够为自动驾驶系统提供精确的地图信息,让自动驾驶算法在训练过程中可以直接利用这些卫星影像数据构建高精度的环境感知模型。
不过,由于 OpenSatMap 的数据来源于 Google Maps,而这些影像并非实时更新,这意味着其数据可能在某些地区无法反映当前的道路状况,可能会影响在快速变化的城市环境中的应用效果。
再加上部分地区的高分辨率图像缺失,以及多标注者的差异可能导致标注的不一致性。直接在 OpenSatMap 上训练自动驾驶模型可能存在一定的安全风险。因此,在将其用于自动驾驶应用时,还需要进一步验证和补充数据。
相关论文以《OpenSatMap:用于大规模地图构建的细粒度高分辨率卫星数据集》(OpenSatMap: A Fine-grained High-resolution Satellite Dataset for Large-scale Map Construction)为题发表在预印本网站 arXiv 上。
相关代码也已经在 GitHub 开源(项目地址:https://opensatmap.github.io)
原文地址:https://blog.csdn.net/2401_88870554/article/details/143898542
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!