VTK编程指南<五>:VTK中的坐标系统、空间变换及VTK矩阵详解
1、坐标系统
计算机图形学里常用的坐标系统主要有 4 种,分别是 Model 坐标系统、World 坐标系统、View坐标系统和 Display坐标系统(这些名词在不同的书里的中文表述均有所差别,所以直接使用英文名词表示),此外还有两种表示坐标点的方式:以屏幕像素值为单位和归一化坐标值(各坐标轴取值范围为[-1,1])。它们之间的关系如图 所示。
Model 坐标系统是定义模型时所采用的坐标系统,通常是局部的笛卡儿坐标系。
World坐标系统是放置Actor 的三维空间坐标系,Actor(vtkActor 类)其中的一个功能就是负责将模型从 Model 坐标系统变换到 World 坐标系统。每一个模型可以定义自己的 Model坐标系统,但World 坐标系只有一个,每一个Actor 必须通过放缩、旋转、平移等操作将 Model坐标系统转换到World 坐标系。World 坐标系同时也是灯光和相机所在的坐标系统。

View 坐标系统表示的是相机所看见的坐标系统。X、Y、Z 轴取值为[-1,1],X、Y 值表示像平面上的位置,Z 值表示到相机的距离。相机负责将 World 坐标系变换到 View 坐标系。
Display 坐标系统与 View 坐标系统类似,但是各坐标轴的取值不是[-1,1],而是使用屏幕像素值。屏幕上显示的不同窗口的大小会影响 View 坐标系的坐标值[-1,1]到 Display 坐标系的映射。可以把不同的渲染场景放在同一个窗口进行显示,例如,在一个窗口里,分为左右两个渲染场景,这左右的渲染场景(vtkRenderer)就是不同的视口(Viewport)。
示例 Viewport实现将一个窗口分为 4个视口,用vtkRenderer::SetViewport()来设置视口的范围(取值为[0,1]):
renderer1->SetViewport(0.0,0.0,0.5,0.5);
renderer2->SetViewport(0.5,0.0,1.0,0.5);
renderer3->SetViewport(0.0,0.5,0.5,1.0);
renderer4->SetViewport(0.5,0.5,1.0,1.0);
在VTK里,Model坐标系统用得比较少,其他三种坐标系统经常使用。它们之间的变换则是由类 vtkCoordinate 进行管理的。根据坐标值的单位、取值范围等不同,可以将坐标系统细分为如下几类。
- DISPLAY——X、Y轴的坐标取值为渲染窗口的像素值。坐标原点位于渲染窗口的左下角,这个对于VTK里的所有二维坐标系统都是一样的,且VTK里的坐标系统都是采用右手坐标系。
- NORMALIZED DISPLAY——X、Y 轴坐标取值范围为[0,1],跟 DISPLAY一样,也是定义在渲染窗口里的。
- VIEWPORT——X、Y的坐标值定义在视口或者渲染器(Renderer)里。
- NORMALIZED VIEWPORT——X、Y 坐标值定义在视口或渲染器里,取值范围为[0,1]。
- VIEW ——X、Y、Z 坐标值定义在相机所在的坐标系统里,取值范围为[-1,1],Z值表示深度信息。
- WORLD——X、Y、Z坐标值定义在世界坐标系统。
- USERDEFINED——用户自定义坐标系统。
vtkCoordinate 可以用来表示坐标系统,其内部提供了函数接口来定义坐标系统:
SetCoordinateSystemToDisplay )
SetCoordinateSystemToNormalizedDisplay ()
SetCoordinateSystemToViewport ()
SetCoordinateSystemToNormalizedViewport )
SetCoordinateSystemToView O
SetCoordinateSystemToWorld ()
另外,该类还实现这些坐标系统之间的转换,例如下述代码实现了归一化窗口坐标与窗口坐标之间的转换:
vtkSmartPointer<vtkCoordinate>coordinate =
vtkSmartPointer<vtkCoordinate>::New);
coordinate->SetCoordinateSystemToNormalizedDisplay();
coordinate->SetValue(.5,.5,0);
int*val;
val =coordinate_>GetComputedDisplay Value(renderer);
这里先调用了SetCoordinateSystemToNormalizedDisplay()设置坐标系统为归一化窗口坐标,并设置坐标值为(0.5,0.5,0),即屏幕的中心;然后通过函数 GetComputedDisplayValue()实现窗口坐标的转换。该类中坐标系统转换函数如下:
GetComputedWorldValue)
GetComputedViewportValue()
GetComputedDisplayValue)
GetComputedLocalDisplayValue()
GetComputedDoubleViewportValue()
GetComputedDoubleDisplayValue)
GetComputedUserDefinedValue()
2、空间变换
在三维空间里定义的三维模型,最后显示时都是投影到二维平面,比如在屏幕上显示。三维到二维的投影包括透视投影(Perspective Projection)和正交投影(Orthogonal Projection)。正交投影也叫平行投影。


VTK 里与空间变换相关的类有 vtkTransform2D,vtkTransform,vtkPerspectiveTransform,vtkGeneralTransform,vtkTransformFilter,vtkMatrix4 X 4 等。例如下面代码实现了vtkActor对象的空间变换:
vtkSmartPointer<vtkTransform>transform =
vtkSmartPointer<vtkTransform>::New);
transform->PostMultiply0;
transform->RotateZ(40);
transform->Translate(10,0,0);
cylinderActor->SetUserTransform(transform);
先定义了vtkTransform 对象,并设置使用右乘计算变换矩阵。RotateZ()设置绕 Z 轴旋转40°,并使用Translate()设置平移大小为(10,0,0),最后通过 vtkActor::SetUserTransform()方法设置用户定义的变换矩阵,实现模型的空间变换。
3、矩阵
3.1、齐次坐标
常见的点一般是Pt(X,Y,Z),相当于一个1×3矩阵,而矩阵相乘的话一般是第一个矩阵的列数要等于第二个矩阵的行数。此处需要引入齐次坐标的概念:从广义上讲,齐次坐标就是用n+1维向量表示n 维向量,即将n维空间的点用 n+1维坐标表示。例如,一般笛卡尔坐标系中的二维点向量[x y]可用齐次坐标表示为[Hx Hx H],其中最后一维坐标是一个标量,称为比例因子。利用齐次坐标可以将平移、旋转、比例、投影等几何变换统一到矩阵的乘法上来,为图形变换提供方便。
该矩阵在右手坐标系中定义,其中左上角部分产生比例、对称、错切和旋转变换,右上角部分产生平移变换;左下角部分产生透视变换;右下角部分产生全比例变换。

3.2、矩阵旋转
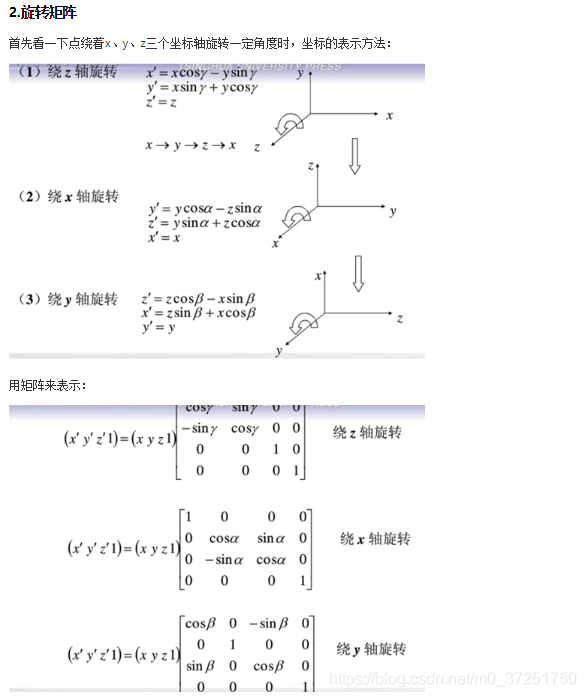
有兴趣可以将上述三个旋转矩阵按照不同的顺序进行相乘,得到的结果也是不一样的,例如:
1)先旋转x轴再旋转y轴再旋转z轴;
2)先旋转y轴再旋转x轴再旋转z轴;
3)先旋转z轴再旋转y轴再旋转x轴;
3.3、vtkMatrix4x4类
3.3.1 vtkMatrix4x4初始化
matrix1:
-0.013 -0.986 0.165 -133
-0.017 0.166 0.986 -35
-1 0.01 -0.02 40
0 0 0 1
vtkMatrix4x4* matrix1 = vtkMatrix4x4::New();
matrix1->Identity();
matrix1->SetElement(0, 0, -0.013);
matrix1->SetElement(0, 1, -0.986);
matrix1->SetElement(0, 2, 0.165);
matrix1->SetElement(0, 3, -133);
matrix1->SetElement(1, 0, -0.017);
matrix1->SetElement(1, 1, 0.166);
matrix1->SetElement(1, 2, 0.986);
matrix1->SetElement(1, 3, -35);
matrix1->SetElement(2, 0, -1.0);
matrix1->SetElement(2, 1, 0.01);
matrix1->SetElement(2, 2, -0.02);
matrix1->SetElement(2, 3, 40);
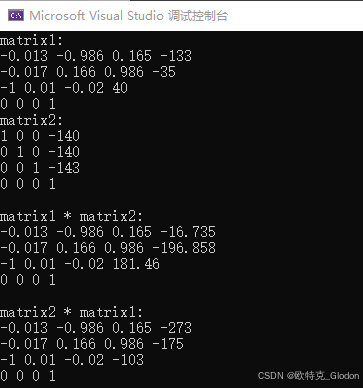
3.3.2 vtkMatrix4x4相乘
下面两个矩阵的结果是不一样的,也就是常说的矩阵乘法左乘和右乘不一样。
vtkMatrix4x4::Multiply4x4(matrix1, matrix2, matrix3);
vtkMatrix4x4::Multiply4x4(matrix2, matrix1, matrix4);
下面是完整的结果和代码:
#include <iostream>
#include <vtkMatrix4x4.h>
int main()
{
vtkMatrix4x4* matrix1 = vtkMatrix4x4::New();
matrix1->Identity();
matrix1->SetElement(0, 0, -0.013);
matrix1->SetElement(0, 1, -0.986);
matrix1->SetElement(0, 2, 0.165);
matrix1->SetElement(0, 3, -133);
matrix1->SetElement(1, 0, -0.017);
matrix1->SetElement(1, 1, 0.166);
matrix1->SetElement(1, 2, 0.986);
matrix1->SetElement(1, 3, -35);
matrix1->SetElement(2, 0, -1.0);
matrix1->SetElement(2, 1, 0.01);
matrix1->SetElement(2, 2, -0.02);
matrix1->SetElement(2, 3, 40);
vtkMatrix4x4* matrix2 = vtkMatrix4x4::New();
matrix2->Identity();
matrix2->SetElement(0, 3, -140);
matrix2->SetElement(1, 3, -140);
matrix2->SetElement(2, 3, -143);
vtkMatrix4x4* matrix3 = vtkMatrix4x4::New();
matrix3->Identity();
vtkMatrix4x4* matrix4 = vtkMatrix4x4::New();
matrix4->Identity();
vtkMatrix4x4::Multiply4x4(matrix1, matrix2, matrix3);
vtkMatrix4x4::Multiply4x4(matrix2, matrix1, matrix4);
// 打印结果矩阵以验证
std::cout << "matrix1: " << std::endl;
for (int i = 0; i < 4; ++i)
{
for (int j = 0; j < 4; ++j)
{
std::cout << matrix1->GetElement(i, j) << " ";
}
std::cout << std::endl;
}
std::cout << "matrix2: " << std::endl;
for (int i = 0; i < 4; ++i)
{
for (int j = 0; j < 4; ++j)
{
std::cout << matrix2->GetElement(i, j) << " ";
}
std::cout << std::endl;
}
std::cout << std::endl;
std::cout << "matrix1 * matrix2: " << std::endl;
for (int i = 0; i < 4; ++i)
{
for (int j = 0; j < 4; ++j)
{
std::cout << matrix3->GetElement(i, j) << " ";
}
std::cout << std::endl;
}
std::cout << std::endl;
std::cout << "matrix2 * matrix1: " << std::endl;
for (int i = 0; i < 4; ++i)
{
for (int j = 0; j < 4; ++j)
{
std::cout << matrix4->GetElement(i, j) << " ";
}
std::cout << std::endl;
}
// 释放内存
matrix1->Delete();
matrix2->Delete();
matrix3->Delete();
matrix4->Delete();
return 1;
}
原文地址:https://blog.csdn.net/m0_37251750/article/details/144281289
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!