RS232、RS485、RS422、TTL、CAN各自的区别
目录
一:工业串口通信标准RS232、RS485、RS422的区别
TTL通信(Transistor-Transistor Logic):
CAN通信(Controller Area Network):
一:工业串口通信标准RS232、RS485、RS422的区别
参考资料:串口通信标准RS232 RS485 RS422的区别 (qq.com)
很多工程师经常把RS-232、RS-422、RS-485称为通讯协议,其实这是不对的,它们仅仅是关于串口通讯的一个机械和电气接口标准(顶多是网络协议中的物理层),不是通讯协议,那它们又有哪些区别呢:
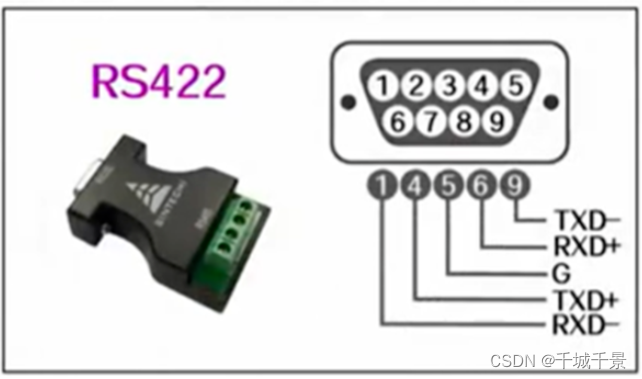
第一个区别、硬件管脚接口定义不同


第二个区别、工作方式不同
-
RS232: 3线全双工
-
RS485: 2线半双工
-
RS422: 4线全双工

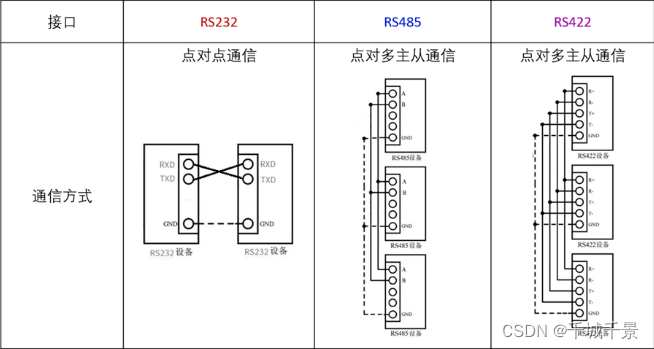
第三个区别、通信方式不同
-
RS232: 只能实现点对点通信
-
RS485:能实现点对多主从通信
-
RS422:也能实现点对多主从通信
第四个区别,逻辑特性不同
高、低电平的判断电压不同。
-
RS232: 逻辑”1” : -3V ~ -15 V;逻辑”0” : +3V ~+15 V
-
RS485: 逻辑”1” : +2V ~ +6 V; 逻辑”0” : -2V ~ -6 V
-
RS422: 逻辑”1” : +2V ~ +6 V; 逻辑”0” : -2V ~ -6 V

第五个区别、抗干扰性、传输距离和传输速率也不同

-
RS-232与RS-485对比
-
抗干扰性:RS485 接口是采用平衡驱动器和差分接收器的组合,抗噪声干扰性好。RS232 接口使用一根信号线和一根信号返回线而构成共地的传输形式,这种共地传输容易产生共模干扰。
-
传输距离:RS485 接口的最大传输距离标准值为 1200 米(9600bps 时)。RS232 传输距离有限,最大传输距离标准值为 50 米,实际上也只能用在 15 米左右。
-
通信能力:RS-485 接口在总线上是允许连接多达128个收发器,用户可以利用单一的 RS-485 接口方便地建立起设备网络。RS-232只允许一对一通信。
-
传输速率:RS-232传输速率较低,在异步传输时,波特率为 20Kbps。RS-485 的数据最高传输速率为 10Mbps 。
-
RS-422与RS-485对比
1、RS-422有4根信号线:两根发送(T+、T-)、两根接收(R+、R-)。由于RS-422的收与发是分开的所以可以同时收和发(全双工)。
2、RS-485只有两根数据线:发送和接收都是A和B。由于RS-485的收与发是共用两根线,所以不能同时收和发(半双工)。
二:RS232、RS485、TTL、CAN各自的区别与应用
参考资料:RS232、RS485、TTL、CAN各自的区别与应用 (qq.com)
RS232通信、RS485通信、TTL通信和CAN通信都是常用的串行通信接口标准,它们在电气特性、通信模式、传输距离、传输速率和应用场合等方面有所不同。
RS232通信:
RS232是最早的串行通信标准之一,由EIA(电子工业协会)制定,主要应用于早期的计算机和外围设备之间的点对点通信。
•电气特性:RS232使用非平衡传输,信号电平为±5V~±15V,逻辑“1”对应负电压(通常为-3V至-15V),逻辑“0”对应正电压(通常为+3V至+15V)。
•通信模式:支持点对点通信,一对线缆通常用于全双工通信(发送和接收独立)。
•传输距离:理论上传输距离较短,一般不超过50米,实际应用中经常使用放大器延长距离。
•应用场合:早期的计算机串口连接打印机、调制解调器等设备,现在较少用于新设计,但在一些老设备和特定场合仍有应用。

RS485通信:
•RS485标准由EIA/TIA共同制定,基于差分信号传输,支持多点、长距离通信。
•电气特性:采用平衡传输,信号电平在+2V至+6V之间为逻辑“1”,在-2V至-6V之间为逻辑“0”,抗干扰能力更强。
•通信模式:支持多点互联,最多可以连接32个设备进行网络通信,可以采用半双工或全双工模式。
•传输距离:理论上最大传输距离超过1200米,视具体环境和线材质量而定,适合组建大型工业网络。
•应用场合:广泛应用于工业自动化、楼宇自动化、安防监控等领域,特别适用于需要远距离传输和多设备联网的场合。
TTL通信(Transistor-Transistor Logic):
•TTL并不是一种通信标准,而是指一种逻辑电平标准,通常在集成电路内部或者集成电路与集成电路之间近距离通信时采用。
•电气特性:TTL电平信号通常定义为逻辑“1”为+5V(典型值)左右,逻辑“0”为接近0V,信号幅度相对较小。
•通信模式:TTL电平主要用于芯片级的接口,如UART、SPI、I²C等接口的信号传输。
•传输距离:由于TTL电平信号衰减较快,不适合长距离传输,一般在几厘米到几米的范围内。
•应用场合:TTL电平在嵌入式系统内部通信、计算机主板上的集成电路之间非常普遍
CAN通信(Controller Area Network):
•CAN是一种车载网络通信协议,由博世公司在上世纪80年代推出,广泛应用于汽车和工业控制领域。
•电气特性:CAN也采用差分信号传输,逻辑“隐性”(逻辑“1”)状态时两根线(CAN_H和CAN_L)电压差为约2V,逻辑“显性”(逻辑“0”)时电压差几乎为0V。
•通信模式:支持多主从结构的多点通信,采用仲裁机制处理总线冲突,支持高速(CAN High Speed)和低速(CAN Low Speed)两种模式。
•传输距离:在正确的布线条件下,CAN总线的传输距离可以达到10千米(高速CAN)或几千米(低速CAN)。
•应用场合:主要应用于车辆电子系统、工业自动化控制系统、楼宇自动化等需要多个节点共享信息的场合。

总结来说,RS232和RS485更多地是物理层和链路层的通信标准,而TTL电平是集成电路内部通信的一种通用逻辑电平标准,CAN则是一种完整的网络通信协议栈,包含了物理层、数据链路层和应用层的概念。
在实际应用中,这些通信方式常常结合使用,比如在设计系统时,可能会在集成电路内部使用TTL电平,然后通过RS232、RS485或CAN总线与其他设备进行通信。
原文地址:https://blog.csdn.net/YYKand/article/details/137809139
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!