智能驾驶规划控制理论学习01-自动驾驶系统介绍、规划控制模块介绍
目录
一、自动驾驶系统概述
目前被国内外广为接受的自动驾驶级别划分标准是 SAE(国际汽车工程学会)分级,从 Level-0~Level-5 总计6 个级别,Level-0 为最低级别,Level-5 为最高级别。限于法规等政策因素,目前绝大多数车企都处在L2或是L2+水平,随着L3自动驾驶相关法规的出台,在今年年底有望出现L3水平的自动驾驶车辆。 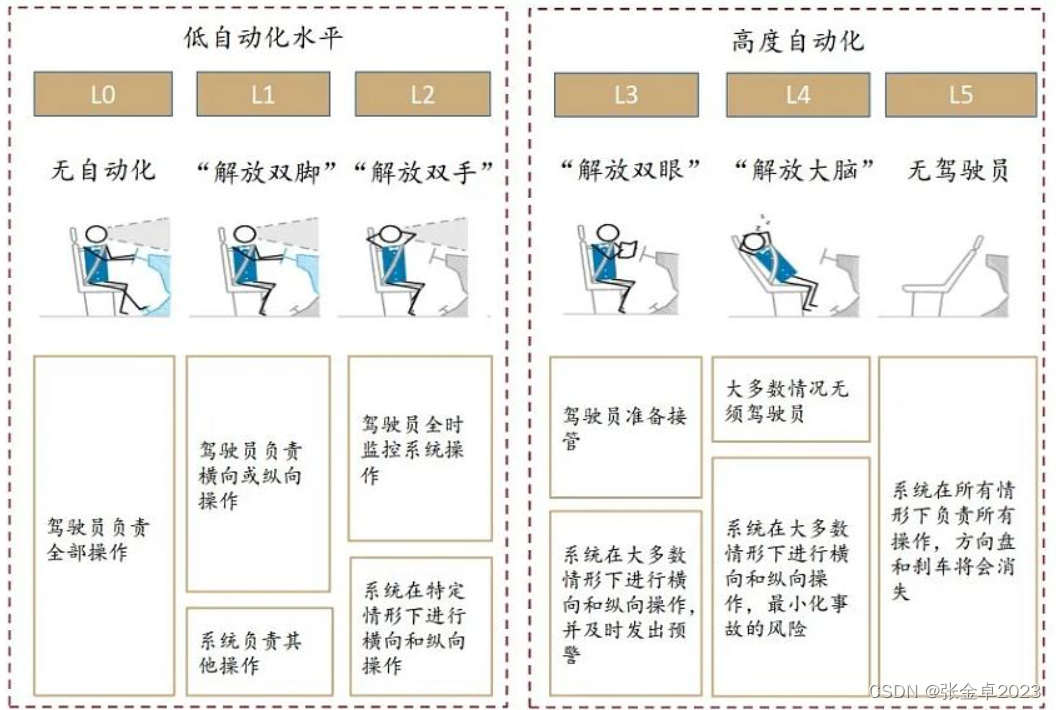
这里不再过多介绍自动驾驶的各个等级,主要介绍autoware官网给出的自动驾驶软件系统框架。
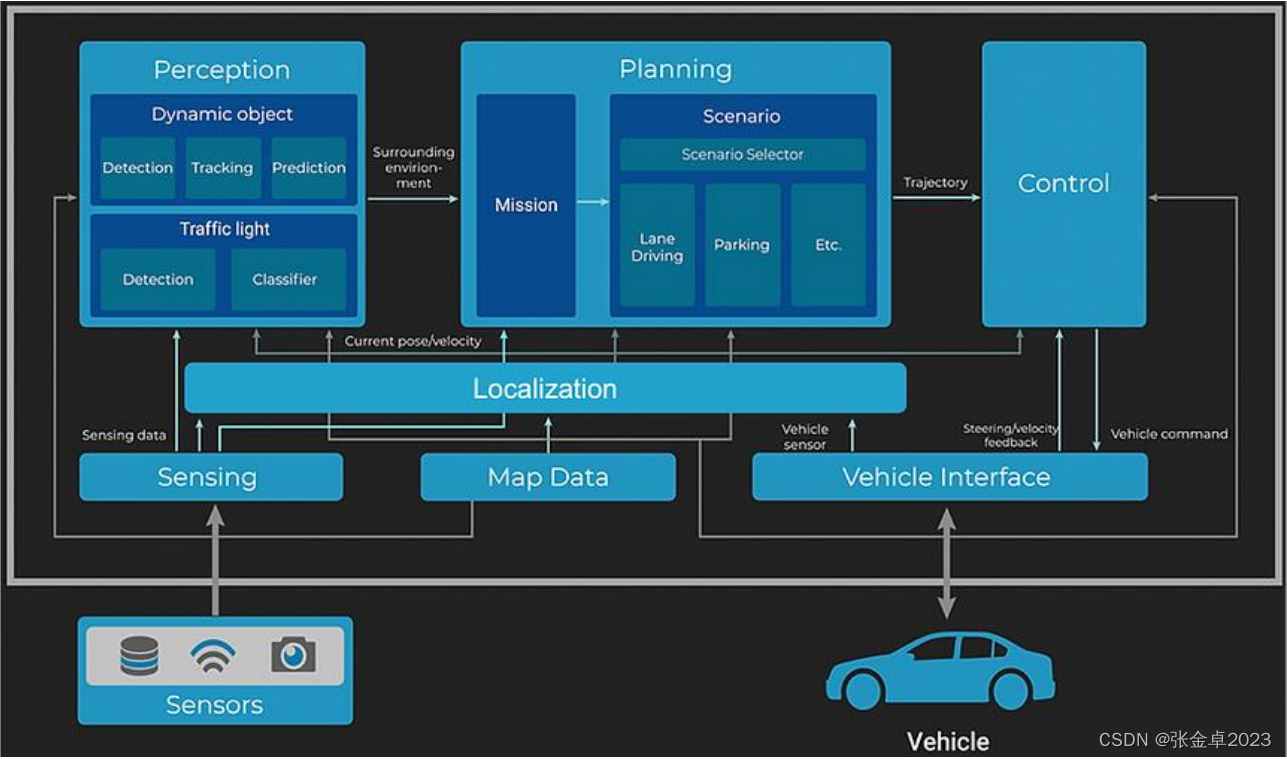
autoware是一款开源的自动驾驶框架,包含了感知、规划、控制等各个模块的算法实现官网链接https://www.autoware.org。
- Sensing 模块:收集自动驾驶车辆上的雷达、相机等各种传感器得到的数据;
- Localization 模块:将传感器数据和高精度地图结合,用于确定自动驾驶车辆的精确位置和方向;
- Perception 模块:检测、识别和跟踪物体的运动(autoware 框架中将prediction 模块放在perception 模块中,因为二者的实现大致类似,都是基于深度学习、强化学习等方式);
- Planning 模块:使用感知信息计算车辆沿特定道路的路径,以避免各种物体和障碍物;
- Control 模块:规划信息会通过control 模块转换成具体准确的车辆控制信号(如转向角度、制动和加速),并通过下一个模块Vechile Interface发送;
- Vechile Interface 模块:根据车辆的运动学特性,将控制信号转换成命令;
- Map Data 模块:利用高精度地图信息,可以使车辆更好地理解环境信息。
二、规划控制模块介绍
1、规划控制架构
如下图所示是规划控制的基本架构,下面对各部分进行介绍: 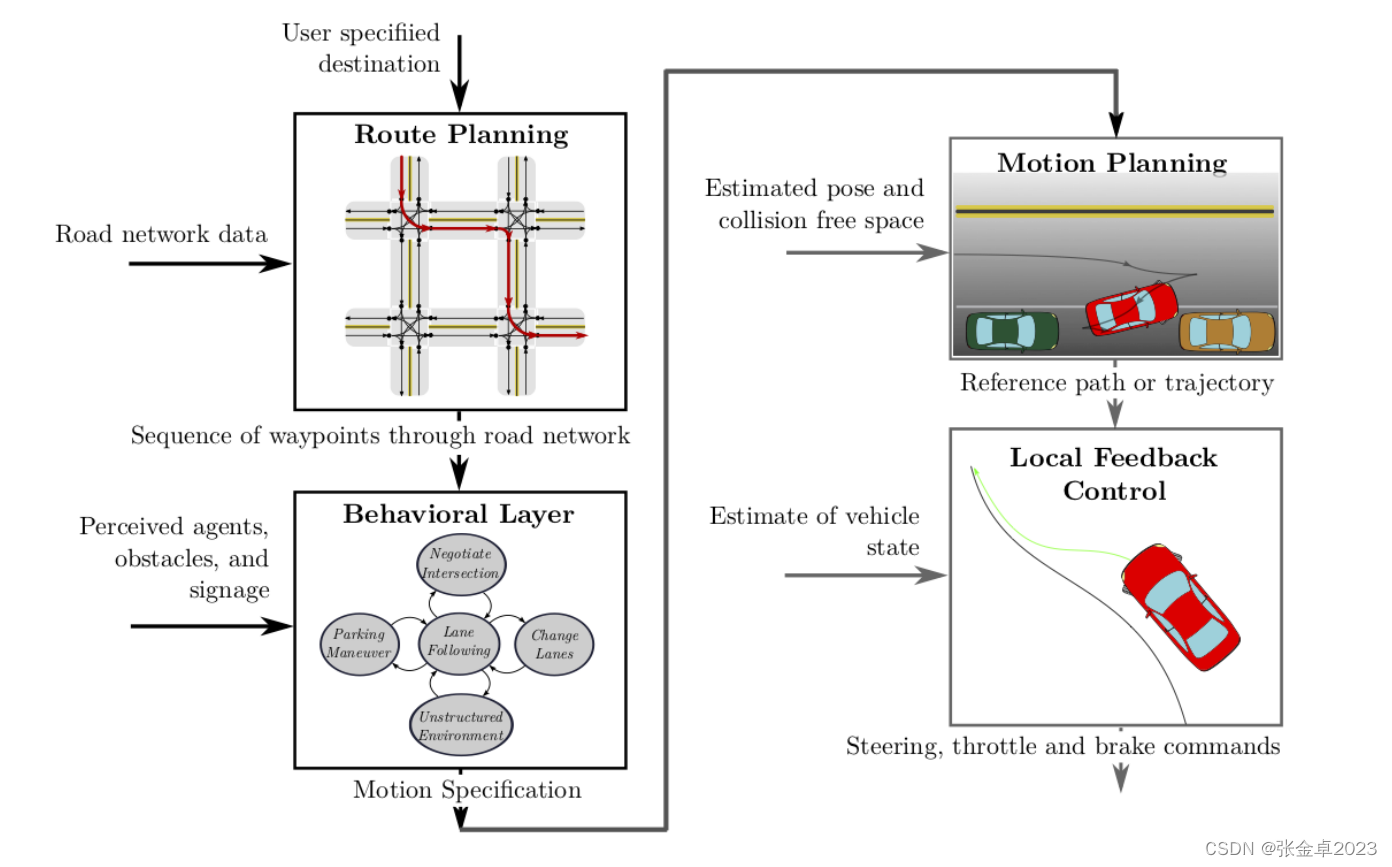
- Route Planning 是路由规划,也叫全局规划,通过用户给定的目的地和道路网络数据生成一条最优路径(与手机导航类似),将一系列的路点数据发送给下游的行为决策模块;
- Behavior Layer 中给出了五种状态场景,同时行为决策还要对感知到的动态障碍物进行决策引导,将Motion Specification运动指令发送给运动规划模块;
- Motion Planning 的目标是生成一条安全的、舒适的符合车辆运动学约束的运动轨迹,将这条光滑的、高质量的运动轨迹下发给下游控制模块;
- Local Feedback Control 结合轨迹信息以及其他模块给出的车辆运动状态的估计,做出轨迹跟踪的控制,同时生成一系列车辆具体控制的指令给下游的底盘(如方向盘转角、油门踏板、刹车指令)。
以上就是PNC模块简单的介绍。
2、规划控制目标
规划:
- 安全性:pnc模块输出的运动轨迹能够避免和静态障碍物和动态障碍物(交通参与者)发生碰撞;
- 舒适性:运动轨迹足够光滑;
- 动力学可行性:规划给出的轨迹可以被下游的控制模块执行。
控制:
- 跟踪精度:尽可能减少跟踪误差;
- 稳定性:控制的指令足够平滑;
- 鲁棒性:控制模块要有一定抵御外界干扰的能力。
3、Cartesian和Frenet坐标系
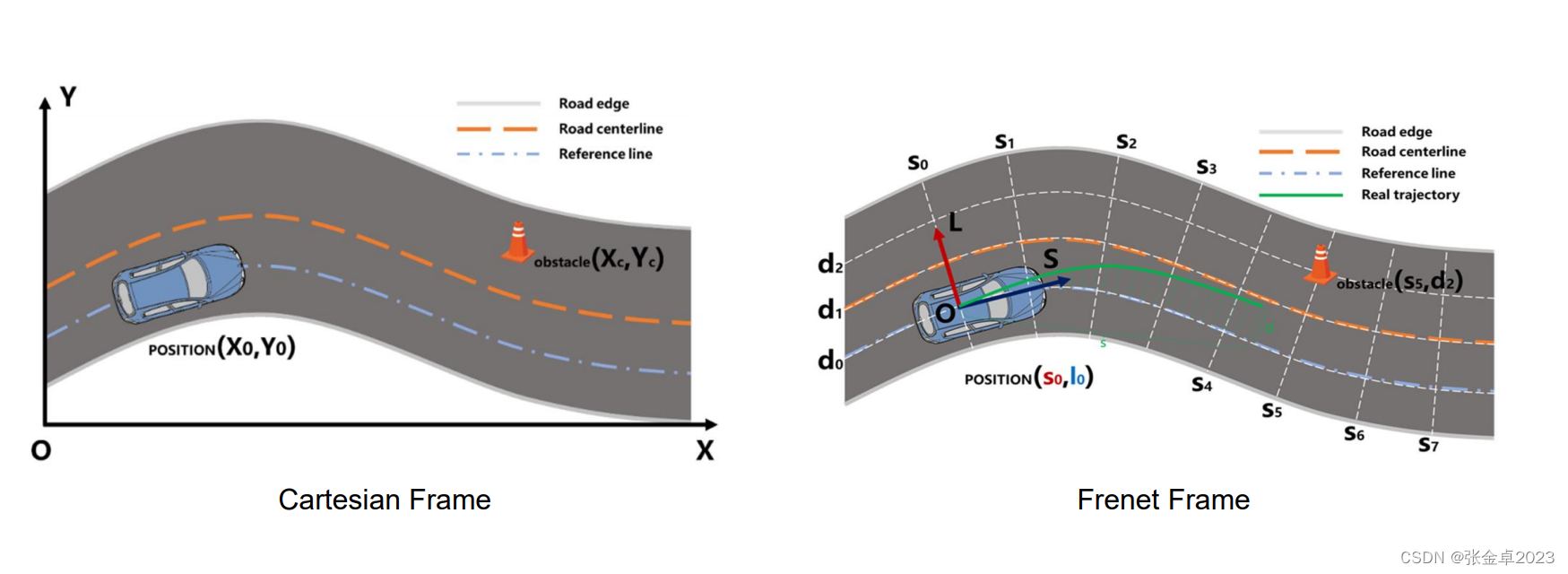
Cartesian坐标系是一种全局坐标系(地图坐标系),Frenet坐标系又叫s-l坐标系。
将Cartesian坐标系转化为Frenet坐标系可以将车辆的运动解耦成两个一维运动:纵向运动(沿着参考线方向)和侧向运动(垂直参考线方向)。
4、Frenet坐标系概览
这部分只是简单介绍Frenet坐标系相比于Cartesian坐标系的优缺点,具体的内容以后再进行讲述。
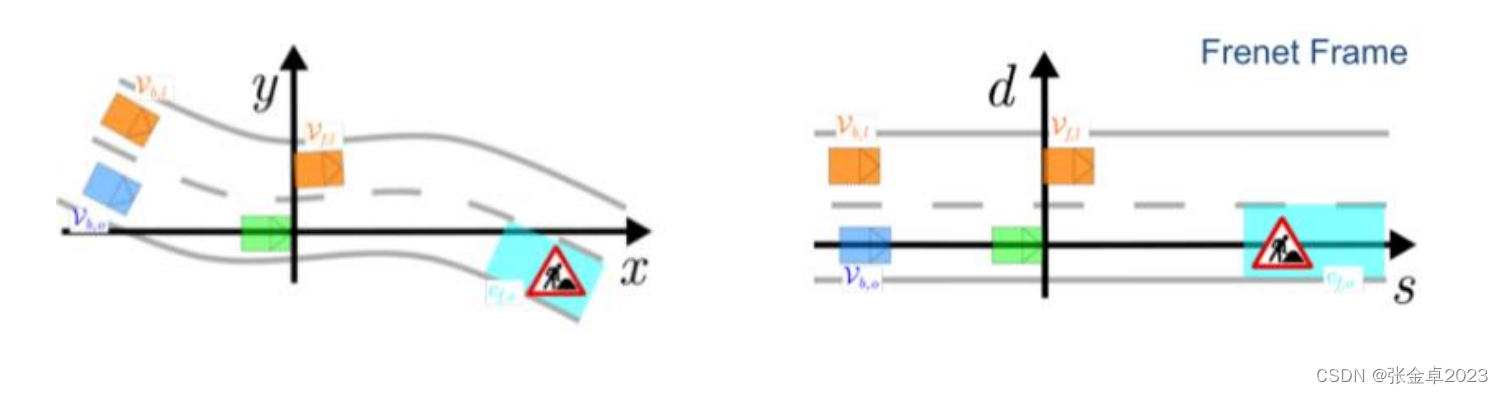
优点:可以更好地理解运动场景,因为大部分运动场景下车辆都沿车道中心线行驶;
缺点:
- 需要一条足够光滑的坐标系(至少到达曲率级别的连续性);
- 曲率约束在Frenet坐标系中比较复杂;
- 车辆在投放到Frenet坐标系中存在几何形状上的变形,如上图全部简化为矩形,因此要想实现精确的碰撞检测是比较困难的。
总之,Frenet坐标系的引入只是为自动驾驶提供了一种可能的解决方案,但是目前并没有明确哪种坐标系更好。
5、解耦式规划和联合式规划
在时空维度上对车辆直接进行规划难度是比较高的,因此出现了解耦式规划和联合式规划。
解耦式规划分为横纵解耦和路径-速度解耦。
- 横纵解耦是对横向运动和纵向运动分别做一系列的五次多项式描述,将横向运动的多项式曲线和纵向运动多项式曲线结合(进行加权处理)选择最优的策略;
- 路径-速度解耦(以百度apollo的motion planner为例):
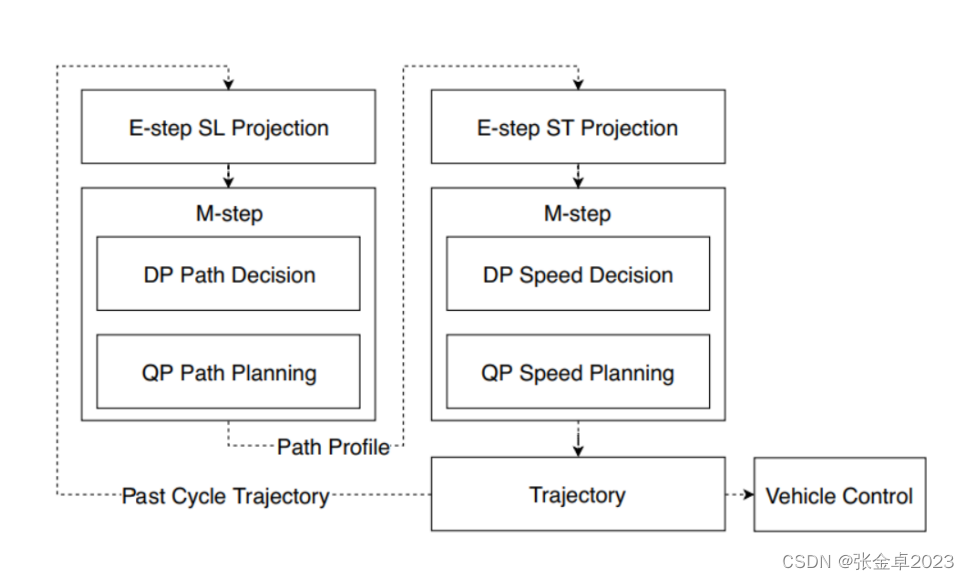
投影:将障碍物等信息投影到Frenet坐标系中;
决策:利用动态规划的方法获得一个粗略解,对应着每个障碍物的决策信息(横向上的绕行、纵向上的让行或强行);
控制:基于二次规划的优化方式生成平滑的曲线。
对于联合式规划而言,直接在时空维度上对车辆运动状态进行分析:
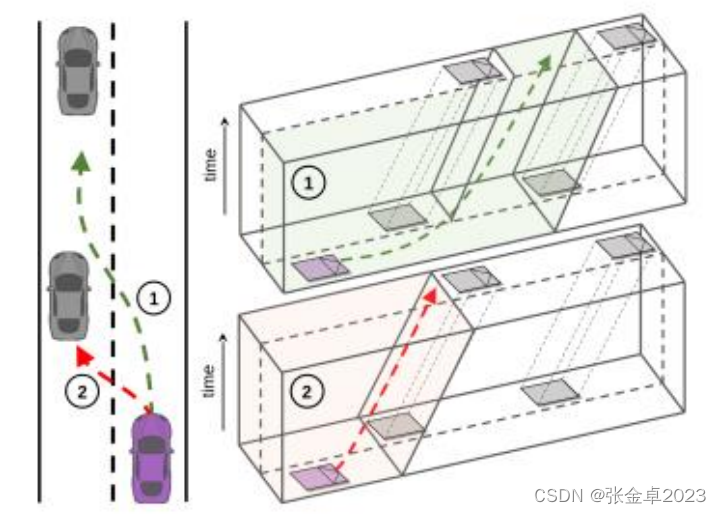
如图中对应的1为强行行为,行为2对应则是跟车,再转换到右侧的3维空间。
联合式规划主要针对行为规划和运动规划两部分:
行为规划是要发现多种策略性的动作控制(如车道保持、车道变换、让行等)、
运动规划主要是产生同时符合时间和空间维度要求的平滑和安全的轨迹。
原文地址:https://blog.csdn.net/m0_68682181/article/details/136340834
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!