西门子S7-SMART运动控制--回原点指令
1.在运动控制向导中使能寻找参考点图 1. 使能寻找参考点位置

注意:若您的应用需要从一个绝对位置处开始运动或以绝对位置作为参考,您必须建立一个参考点(RP)或零点位置,该点将位置测量固定到物理系统的一个已知点上。
2.设置寻找参考点位置参数
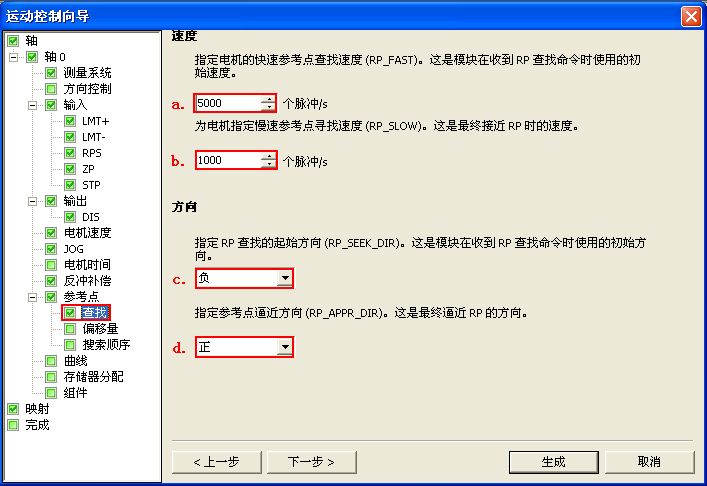
图 2.设置寻找参考点参
a.定义快速寻找速度“RP_FAST”(快速寻找速度是模块执行RP寻找命令的初始速度,通常RP_FAST是MAX_SPEED的2/3左右);
b.定义慢速寻找速度“RP_SLOW”(慢速寻找速度是接近RP的最终速度,通常使用一个较慢的速度去接近RP以免错过,RP_SLOW的典型值为SS_SPEED);
c.定义初始寻找方向“RP_SEEK_DIR”(初始寻找方向是RP寻找操作的初始方向。通常,这个方向是从工作区到RP附近。限位开关在确定RP的寻找区域时扮演重要角色。当执行RP寻找操作时,遇到限位开关会引起方向反转,使寻找能够继续下去,默认方向=反向);
d.定义最终参考点接近方向“RP_APPR_DIR”,(最终参考点接近方向是为了减小反冲和提供更高的精度,应该按照从RP移动到工作区所使用的方向来接近参考点,默认方向=正向)。
3.设置参考点偏移量
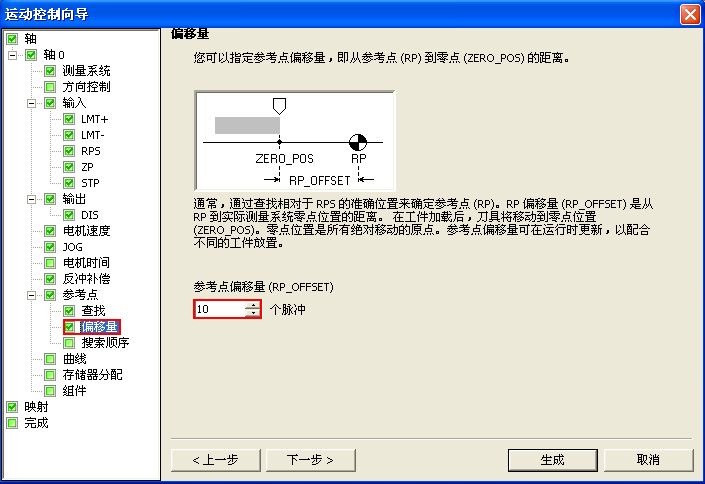
图 3.设置参考点偏移量
注意:参考点偏移量“RP_OFFSET是”在物理的测量系统中RP到零位置之间的距离,缺省=0。
4.设置寻找参考点顺序

图 4.设置寻找参考点顺序
S7-200 SMART 提供4中寻找参考点顺序模式,每种模式定义如下:
RP寻找模式1:将 RP 定位在靠近工作区一侧的 RPS 输入开始激活的位置;
RP寻找模式2:将 RP 定位在 RPS 输入的激活区域的中心;
RP寻找模式3:将 RP 定位在 RPS 输入的激活区域外的指定数量的零脉冲 (ZP) 处;
RP寻找模式4:将 RP 定位在 RPS 输入的激活区域内的指定数量的零脉冲 (ZP) 处。

注意: 必须使能 RPS 输入才能使用 RP 搜索功能。 若要使用 RP 搜索模式 3 或模式 4,则还必须使能 ZP 输入,除非在进入 RPS 有效区后将要接收的 ZP 脉冲的数量组态为“0”。
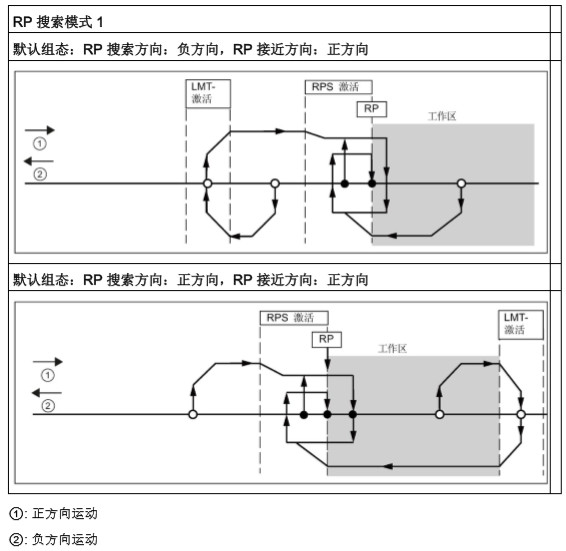
图 5.RP搜索模式1

图 6.RP搜索模式2
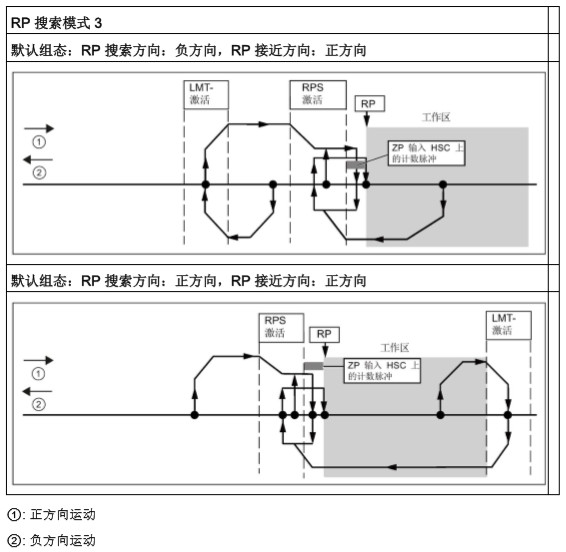
图 7.RP搜索模式3

图 8.RP搜索模式4
5.调用回原点指令
图 9.回原点指令
原文地址:https://blog.csdn.net/u010670857/article/details/142832682
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!