Spark的动态资源分配算法
文章目录
前言
在TODO这篇文章中,介绍了Spark RPC通信的基本流程。可以看到,Spark中的Driver通过Stage调度生成了物理执行计划,这个物理执行计划包括了所有需要运行的Task,以及,最关键的,这些Task希望运行的节点信息,我们叫做Locality Preference,即本地性偏好。
但是在Yarn的场景下,资源是以Executor(Container)为单位进行调度,整个Container的粒度与Task不一一对应,Container的生命周期与Task不一一对应。在这种场景下,动态资源调度的基本任务就是
- 根据这些Task以及Task的本地性偏好,向Yarn申请Container作为Executor以执行Task;这里最重要的,是在资源申请中表达出对应的Task的位置偏好。
- 在申请完资源以后,根据Task的本地性偏好,将Task调度到申请到的资源上面去。这里最重要的,是尽量满足Task的本地性偏好。
本文将详细讲解这个过程。
对于资源申请算法的基本流程,以及将Task和资源进行匹配的基本流程,本文都用实际例子进行讲解。
基于任务需求进行资源请求的整体过程
向Yarn请求资源是由客户端向ApplicationMaster申请,然后ApplicationMaster向Yarn发起请求的,而不是客户端直接向Yarn申请的。
资源是为了服务于Task的运行,Task的生成显然是Driver端负责的,Driver会根据物理执行计划生成的Task信息发送给ApplicationMaster,ApplicationMaster根据这些Task的相关信息进行资源申请。
ApplicationMaster启动以后,会有一个独立线程不断通过调用YarnAllocator.allocateResources()进行持续的资源更新(查看ApplicationMaster的launchReporterThread()方法)。这里叫资源更新,而不叫资源申请,因为这里的操作包括新的资源的申请,旧的无用的Container的取消,以及Blocklist Node的更新等多种操作。
总而言之,ApplicationMaster作为客户端和Yarn的中间方,其资源申请的方法allocateResource()在逻辑上的功能为:
- 粒度转换: 将Task级别的资源请求,转换为Container(Executor级别的资源请求)。这是一个游戏到粗的粒度的转换。
- 维度转换: Driver发过来的资源请求是资源的最终全局状态,而Yarn 的 API 要求的针对每一个Container进行增量请求。因此,allocateResources()会将Driver发送过来资源请求的最终状态,对比当前系统已经运行、分配未运行、已经发送请求但是还没有分配资源等等已经存在的状态,确定一个发送给Yarn的增量请求状态。这是一个全量到增量的维度的转换。
- 角度转换: Driver发过来的每个Task都带有各自Task的Locality,而发送给Yarn的Container请求又是带有Locality需求的Container需求。这是一个从Task到Container的角度的转换。
ApplicationMaster端的allocateResources()方法的基本流程在代码YarnAllocator.allocateResources()中:
---------------------------------- YarnAllocator ------------------------------------
def allocateResources(): Unit = synchronized {
updateResourceRequests() // 与Yarn进行资源交互
val allocateResponse = amClient.allocate(progressIndicator) // 从Yarn端获取资源结果,包括新分配的、已经结束的等等
val allocatedContainers = allocateResponse.getAllocatedContainers()
handleAllocatedContainers(allocatedContainers.asScala) // 处理新分配的Container
val completedContainers = allocateResponse.getCompletedContainersStatuses() // 处理已经结束的Container
processCompletedContainers(completedContainers.asScala)
}
}
ApplicationMaster端的allocateResources()的基本流程如下图所示:
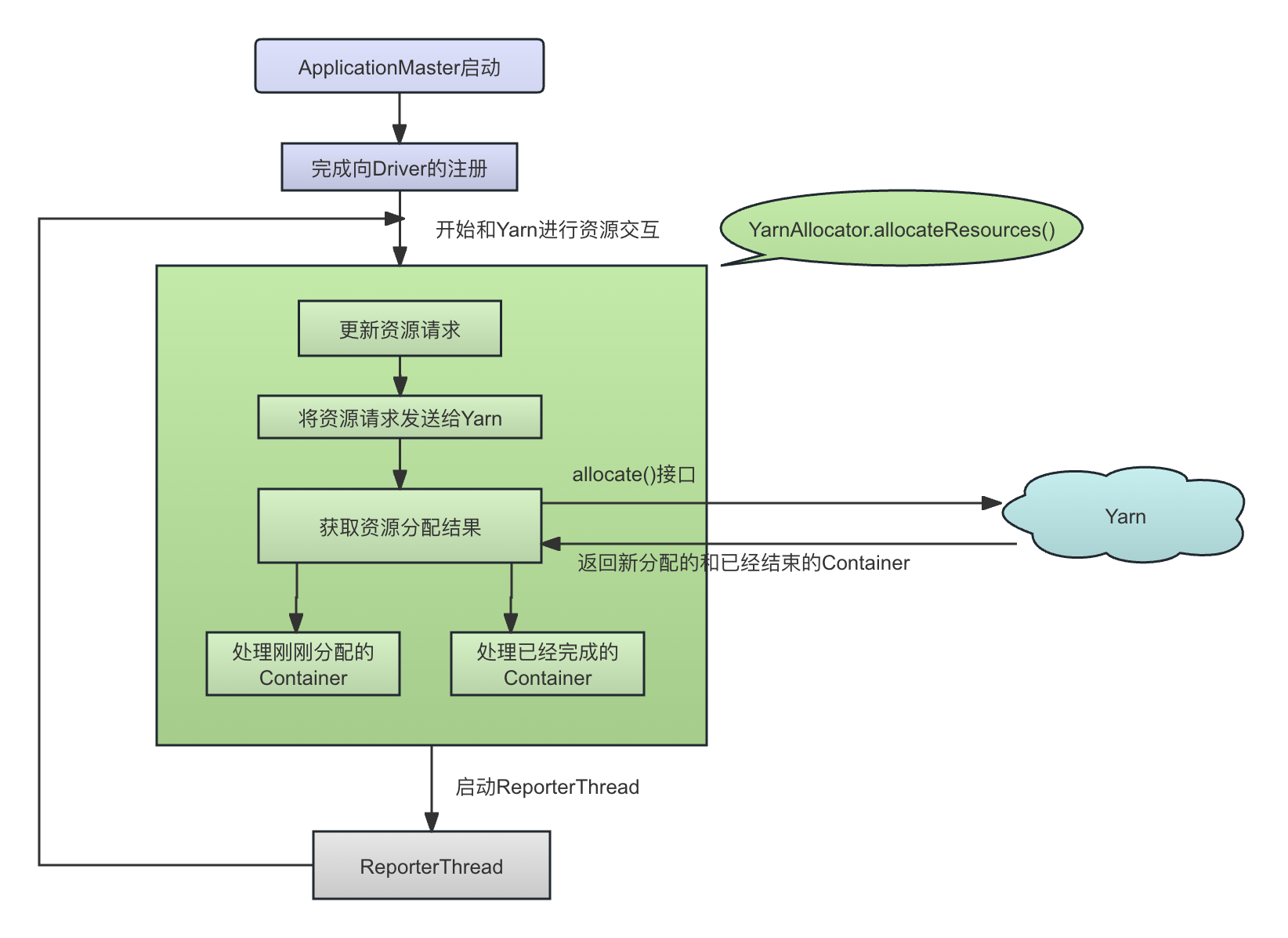
- 生成资源请求,即将Driver发送过来的全量的、Task粒度的资源请求和Host偏好信息,转换为对Yarn的、以Executor为粒度的资源请求
updateResourceRequests() - 将资源请求发送给Yarn并从Yarn上获取分配结果(基于Yarn的异步调度策略,这次获取的记过并非本次资源请求的分配结果)以进行后续处理:
val allocatedContainers = allocateResponse.getAllocatedContainers() handleAllocatedContainers(allocatedContainers.asScala) val completedContainers = allocateResponse.getCompletedContainersStatuses() processCompletedContainers(completedContainers.asScala)
可以看到,updateResourceRequests()是资源请求的核心方法,它会负责同Yarn进行通信以进行资源请求。
在TODO中,我们也介绍过,生成资源请求,其决策过程发生在方法updateResourceRequests()中。我们主要来看updateResourceRequests()方法:
---------------------------------- YarnAllocator ------------------------------------
def updateResourceRequests(): Unit = {
// 获取已经发送给Yarn但是待分配的ContainerRequest,计算待分配容器请求的数量
// 这些ContainerRequest是之前通过调用amClient.addContainerRequest 发送出去的
val pendingAllocate = getPendingAllocate
val numPendingAllocate = pendingAllocate.size
// 还没有发送请求的executor的数量
val missing = targetNumExecutors - numPendingAllocate -
numExecutorsStarting.get - numExecutorsRunning.get
// 还没有发送给Yarn的资源请求
if (missing > 0) {
/**
* 将待处理的container请求分为三组:本地匹配列表、本地不匹配列表和非本地列表。
*/
val (localRequests, staleRequests, anyHostRequests) = splitPendingAllocationsByLocality(
hostToLocalTaskCounts, pendingAllocate)
// staleRequests 的意思是,ApplicationMaster已经请求了这个Container,
// 但是这个ContainerRequest所要求的hosts里面没有一个是在 hostToLocalTaskCounts (即task所倾向于)中的,因此,需要取消这个Container Request,因为已经没有意义了
// cancel "stale" requests for locations that are no longer needed
staleRequests.foreach { stale =>
amClient.removeContainerRequest(stale)
}
val cancelledContainers = staleRequests.size
// consider the number of new containers and cancelled stale containers available
// 将新的container请求,以及刚刚取消的container,作为available container
val availableContainers = missing + cancelledContainers
// to maximize locality, include requests with no locality preference that can be cancelled
// 在availableContainers的基础上,再算上没有任何locality要求的并且还没有分配成功的container
val potentialContainers = availableContainers + anyHostRequests.size
// LocalityPreferredContainerPlacementStrategy,计算每一个Container 的Node locality和 Rack locality
val containerLocalityPreferences = containerPlacementStrategy.localityOfRequestedContainers(
potentialContainers, numLocalityAwareTasks, hostToLocalTaskCounts,
allocatedHostToContainersMap, localRequests)
val newLocalityRequests = new mutable.ArrayBuffer[ContainerRequest]
// 遍历ContainerLocalityPreferences数组中的每一个ContainerLocalityPreferences
containerLocalityPreferences.foreach {
case ContainerLocalityPreferences(nodes, racks) if nodes != null =>
newLocalityRequests += createContainerRequest(resource, nodes, racks)// 根据获取的locality,重新创建ContainerRequest请求
}
// 除了有locality需求的container以外,还有更多的available container需要被请求,因此对这些container请求也发送出去
if (availableContainers >= newLocalityRequests.size) {
// more containers are available than needed for locality, fill in requests for any host
for (i <- 0 until (availableContainers - newLocalityRequests.size)) {
newLocalityRequests += createContainerRequest(resource, null, null) // 构造ContainerRequest对象
}
} else {
val numToCancel = newLocalityRequests.size - availableContainers
// cancel some requests without locality preferences to schedule more local containers
anyHostRequests.slice(0, numToCancel).foreach { nonLocal =>
amClient.removeContainerRequest(nonLocal)
}
}
} else if (numPendingAllocate > 0 && missing < 0) {
val numToCancel = math.min(numPendingAllocate, -missing)
val matchingRequests = amClient.getMatchingRequests(RM_REQUEST_PRIORITY, ANY_HOST, resource)
matchingRequests.iterator().next().asScala
.take(numToCancel).foreach(amClient.removeContainerRequest)
}
}
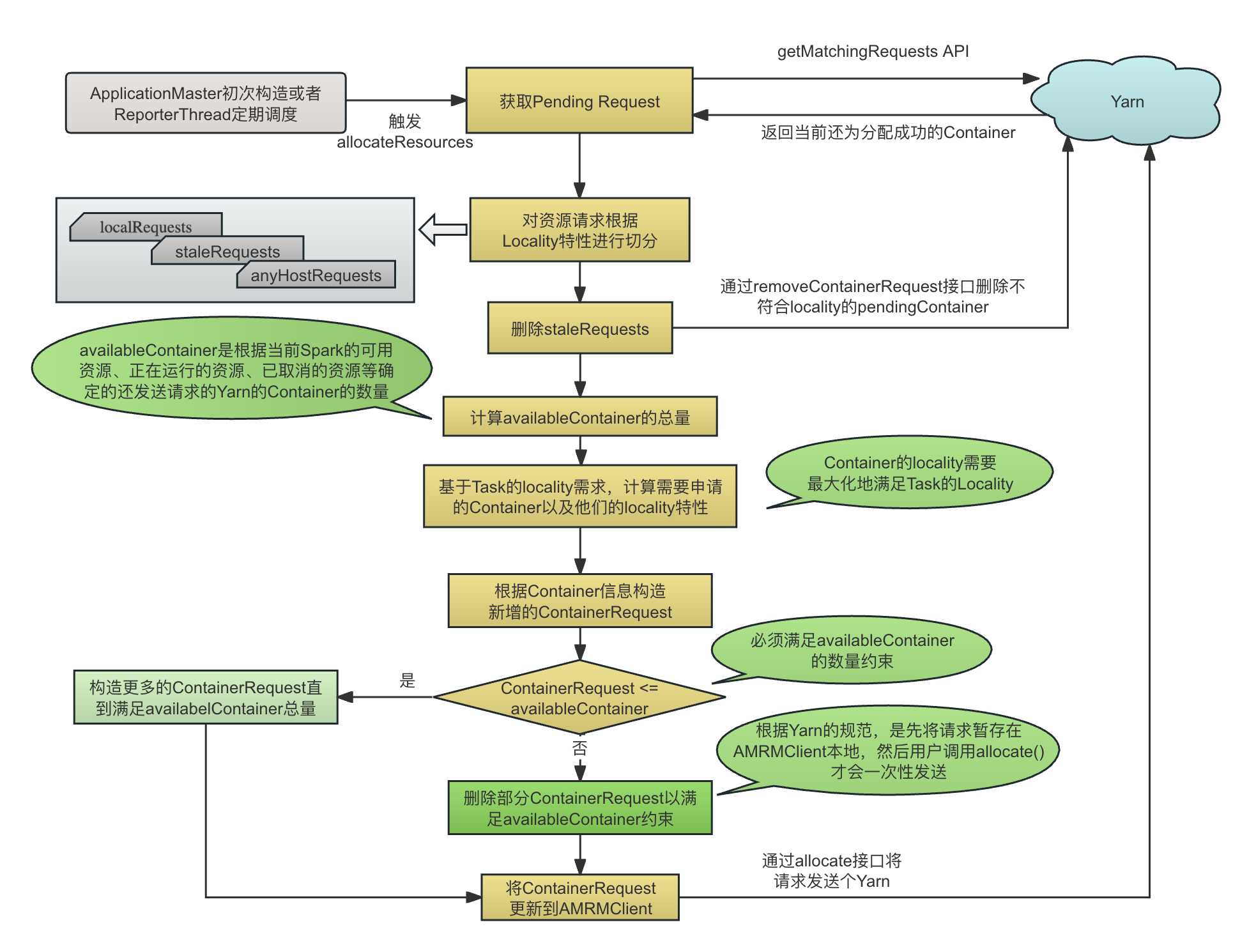
其基本过程为:
-
获取当前Pending的request(已经发送给Yarn但是还没有分配Container的请求),并将这些Pending的请求按照本地性的需求进行切分。这里的基本意图是,当前收到了来自Driver的全局的资源状态信息,而在Yarn上还有一部分之前的资源请求还没有分配Container,那么,会不会这些Pending Requewt中有些Request已经不需要了(满足不了任何一个task的locality需求)?
val (localRequests, staleRequests, anyHostRequests) = splitPendingAllocationsByLocality( hostToLocalTaskCounts, pendingAllocate)切分的过程,就是查看当前在Yarn这一端pending的所有的Container的locality与我们目前需求的所有(全局)的Task的locality的交集:
-------------------------------------- YarnAllocator ---------------------------------- private def splitPendingAllocationsByLocality( hostToLocalTaskCount: Map[String, Int], // 每一个host到希望分配上去的task的数量 pendingAllocations: Seq[ContainerRequest] // 还没有分配出去的ContainerRequest ): (Seq[ContainerRequest], Seq[ContainerRequest], Seq[ContainerRequest]) = { val localityMatched = ArrayBuffer[ContainerRequest]() val localityUnMatched = ArrayBuffer[ContainerRequest]() val localityFree = ArrayBuffer[ContainerRequest]() val preferredHosts = hostToLocalTaskCount.keySet // 将当前已经发送给Yarn但是还没有分配的Container的请求进行切分 pendingAllocations.foreach { cr => val nodes = cr.getNodes // 这个 ContainerRequest 对节点的要求 if (nodes == null) { localityFree += cr // 这个ContainerRequest对nodes没有要求,那么就是对本地性没有要求的Container请求 } else if (nodes.asScala.toSet.intersect(preferredHosts).nonEmpty) { // 这个Container的本地性要求和task期望分配的hosts集合有交集 localityMatched += cr // 把这个ContainerRequest添加到localityMatched的ContainerRequest集合中去 } else { // 这个Container的本地性要求和task期望分配的hosts集合没有交集 localityUnMatched += cr // 把这个ContainerRequest添加到localityMatched的ContainerRequest集合中去 } } // 切分结果 (localRequests, staleRequests, anyHostRequests) (localityMatched.toSeq, localityUnMatched.toSeq, localityFree.toSeq) } }切分过程的具体流程如下图所示:
切分的具体流程为 :
- 如果这个Pending Container没有任何的locality要求,那么就是localityFree Container,即,其实际分配的位置有可能是当前所有tasks所希望的位置,也可能不是,那么这个container就是localityFree container
if (nodes == null) { localityFree += cr // 这个ContainerRequest对nodes没有要求,那么就是对本地性没有要求的Container请求 } - 如果这个Pending Container有locality 要求,并且这个locality的nodes与当前所有tasks有交集,那么这个Pending Container就被划分为localityMatched,显然,这个Pending Container是不应该被取消的;
else if (nodes.asScala.toSet.intersect(preferredHosts).nonEmpty) { // 这个Container的本地性要求和task期望分配的hosts集合有交集 localityMatched += cr // 把这个ContainerRequest添加到localityMatched的ContainerRequest集合中去 } - 如果这个Pending Container有locality要求,但是这个locality中的nodes不在当前所有tasks的locality中的任何一个节点,即这个Pending Container实际分配的位置不可能是任何一个task所倾向于的位置,那么这个Pending Container就是localityUnMatched,显然,localityUnMatched container目前无法放置任何一个task,需要取消掉;
else { // 这个Container的本地性要求和task期望分配的hosts集合没有交集 localityUnMatched += cr // 把这个ContainerRequest添加到localityMatched的ContainerRequest集合中去 }
- 如果这个Pending Container没有任何的locality要求,那么就是localityFree Container,即,其实际分配的位置有可能是当前所有tasks所希望的位置,也可能不是,那么这个container就是localityFree container
-
对于localityUnmatched container,向Yarn发送请求,取消这种Container,这些被取消的Container在后面会重新申请,以便在申请的资源总量不变的情况下增强资源的本地特性:
staleRequests.foreach { stale => amClient.removeContainerRequest(stale) } -
计算总的Container的数量,包括:
- Pending Container中刚刚cancel的container的数量,这些Container刚刚取消了,我们可以再次申请这些Container,但是肯定会增强这些新的资源请求的locality,以最大化我们的Task的locality
- Pending Container中的locality free的Container数量,这些Container可能分配在集群中的任何地方
- 新增(missing)的Container请求,即当前的总的container请求中除去正在运行(已经有task在运行,numExecutorsRunning)和正在启动(已经分配但是还没分配task,numExecutorsStarting)的,再除去所有的pending的container(numPendingAllocate,是从Yarn的API中获取的数量,已经请求但是还没有分配成功的资源),多出来的Container:
// 还没有发送请求的executor的数量 val missing = targetNumExecutors - numPendingAllocate - numExecutorsStarting.get - numExecutorsRunning.get ..... // consider the number of new containers and cancelled stale containers available // 将新的container请求,以及刚刚取消的container,作为available container val availableContainers = missing + cancelledContainers // to maximize locality, include requests with no locality preference that can be cancelled // 在availableContainers的基础上,再算上没有任何locality要求的并且还没有分配成功的container val potentialContainers = availableContainers + anyHostRequests.size在这里,
val availableContainers = missing + cancelledContainers,即available container代表这次可以增量申请的最大的container数量,包括了这次的额外需求,以及刚刚取消的container(取消的container可以重新申请) -
构建Container请求。这里会根据LocalityPreferredContainerPlacementStrategy的localityOfRequestedContainers来构建Container请求,返回Array[ContainerLocalityPreferences],每一个ContainerLocalityPreferences代表了一个带有对应host和rack信息的Container请求:
val containerLocalityPreferences = containerPlacementStrategy.localityOfRequestedContainers( potentialContainers, numLocalityAwareTasks, hostToLocalTaskCounts, allocatedHostToContainersMap, localRequests) -
根据ContainerLocalityPreferences,转换成Yarn的 ContainerRequest
containerLocalityPreferences.foreach { case ContainerLocalityPreferences(nodes, racks) if nodes != null => newLocalityRequests += createContainerRequest(resource, nodes, racks)// 根据获取的locality,重新创建ContainerRequest请求 case _ => } -
如果可以申请的Container(available container)的数量大于刚刚计算完locality的Container数量,那么,为了将申请配额用尽,就再申请其相差的部分Container, 保证申请的Container的数量不小于Available Container的数量。
if (availableContainers >= newLocalityRequests.size) { // more containers are available than needed for locality, fill in requests for any host for (i <- 0 until (availableContainers - newLocalityRequests.size)) { newLocalityRequests += createContainerRequest(resource, null, null) // 构造ContainerRequest对象 } } -
如果可以申请的Container(available container)的数量小于刚刚计算完locality的Container数量,那么需要取消一部分container:
else { val numToCancel = newLocalityRequests.size - availableContainers // cancel some requests without locality preferences to schedule more local containers anyHostRequests.slice(0, numToCancel).foreach { nonLocal => amClient.removeContainerRequest(nonLocal) } -
调用Yarn的标准接口addContainerRequest(),将ContainerRequest发送给Yarn(其实这个接口并不会真正将请求发送出去,只会存放在RMAMClient端,真正发送是通过allocate()接口):
newLocalityRequests.foreach { request => amClient.addContainerRequest(request) } // 在这里发送container的请求,从日志来看,资源请求已经发出来了,Yarn已经处理了
所以,从上面可以看到,最关键的方法是LocalityPreferredContainerPlacementStrategy.localityOfRequestedContainers()方法,它根据当前的已有信息(总共的Container需求,有locality需求的task的数量,这些locality分布在每一个task上的数量等),生成一个Array[ContainerLocalityPreferences]数组,数组中的每一个元素代表了一个Container的需求,并包含了其locality的要求信息,然后基于生成的ContainerLocalityPreferences经过转换成ContainerRequest,发送给Yarn。
资源申请的生成过程详解
资源申请的生成,就是根据当前集群运行的基本情况,Task的基本需求,生成Yarn上的资源请求的过程。
资源申请的生成过程的简单例子
在了解其具体实现以前,我们以具体例子的方式,看一下localityOfRequestedContainers()方法的基本实现逻辑,从而对其动机和达成的效果有一个很好的理解,然后,我们再看其实现细节。
-
从任务调度去看,看到的是Task以及每个 Task的Locality倾向。比如,现在我们一共需要为30个Task分配资源,其中,20个Task的locality倾向为Host1,Host2,Host3,10个Task的Locality倾向为Host1, Host2, Host4, 因此,对应到每个Host上的Task权重如下表所示:
Host 1 Host 2 Host 3 Host 4 20 Tasks 20 20 20 10 Tasks 10 10 10 Sum of Tasks 30 30 20 10 即,20个Task希望分配在Host1,Host2,Host3中的任何一个,有10个Task希望分配在Host1, Host2, Host4中的任何一个。如上表所示,综合来看,所有Task在四台机器上分配的权重是
(30, 30, 20,10)。 -
假设一个Task需要的vCore是1,而一个Container(Executor)有2个vCore,因此,转换成Container以后的结果如下表所示:
Host 1 Host 2 Host 3 Host 4 20 Tasks 20 20 20 10 Tasks 10 10 10 Sum of Tasks 30 30 20 10 Sum of Containers 15 15 10 5 上面的Sum of Containers的数字只是表示一个比例值,并不表示对应的Host上实际需要申请的Container的数量,我们实际需要的总的Container数量才15个。那么,这15个Container需求平均到每台Host上是多少呢?
-
比如Host 1的Sum of Container 为15, 所有Host的Sum of Container 是45,因此占比是1/3,所以平均下来分配到Host1上的Container数量应该是
15 * 1/3 = 5。经过向上取整(宁可稍微多分配也不要少分配)以后,每台机器所平均到的15个Container需求是:Host 1 Host 2 Host 3 Host 4 20 Tasks 20 20 20 10 Tasks 10 10 10 Sum of Tasks 30 30 20 10 Sum of Containers 15 15 10 5 Allocated Container Target 5 5 4 2 -
在这里,计算完总的Allocated Container Target以后,需要减去当前已经在该Host上已经存在(正在运行或者在这个Host上pending的Container),因为我们最终发送给Yarn的Container请求是增量请求。假设现在在每一个Host上已经存在的Container数量都是1,即15个Container中有4个Container是已经分配的,那么,减去已经存在的Container数量以后的结果如下表所示,所以,我们需要新申请12个Container:
Host 1 Host 2 Host 3 Host 4 20 Tasks 20 20 20 10 Tasks 10 10 10 Sum of Tasks 30 30 20 10 Sum of Containers 15 15 12 6 Allocated Container Target 5 5 4 2 Newly Allocated Container 4 4 3 1 -
将每个Host的Newly Allocated Container按照比例进行缩放,保证比例最大的那个Host(这里是Host1 和 Host 2)的比例值是需要新申请的Container的数量。在这里,扩大因子应该是
12(Container的总数量)/4(比例最大的Host的Average Allocated Container) = 3:Host 1 Host 2 Host 3 Host 4 20 Tasks 20 20 20 10 Tasks 10 10 10 Sum of Tasks 30 30 20 10 Sum of Containers 15 15 10 5 Allocated Container Target 5 5 4 2 Newly Allocated Container 4 4 3 1 Round Up 12 12 9 3 -
开始发起资源请求。每一个Container请求的Locality中包含的Host如下表所示:
Host 1 Host 2 Host 3 Host 3 3 Containers ✔ ✔ ✔ ✔ 6 Containers ✔ ✔ ✔ 3 Containers ✔ ✔ 其含义是:
- 3个Container请求的Locality是
[Host1, Host2, Host3, Host4],即请求Yarn分配3个Container,并且尽量将它们分配在这4个Hosts中。此时剩下的Host比例为[9:9:6:0] - 6个Container请求的Locality是
[Host1, Host2, Host3],即请求Yarn分配6个Container,并且尽量将它们分配在这3个Hosts中,此时剩下的Host中container比例为[3:3:0] - 3个Container请求的Locality是
[Host1, Host2],即请求Yarn分配3个Container,并且尽量将它们分配在这2个Hosts中
这样,所有Host的Container比例就是
12:12:9:3,平均到12个需分配的Container以后的比例是4:4:3:1,再加上已经分配在每个host上的1个Container,那么总的Container在每个Host上的比例就是5:5:4:2,这个比例和我们直接根据每个Host的task比例折算成的Container的比例15:15:10:5是大致相近的。
到了这里,我们可以理解了,为什么我们需要在 步骤5 做Round Up操作,并且Round Up的目标是将目前比例值最大的Host的比例值扩大为当前Container需求的最大值? 因为在步骤6中生成Container请求的时候,比例值最大的Host的比例值肯定是等于需要申请的Container数量的。 - 3个Container请求的Locality是
资源调度算法的代码解析
上面以实际例子解释了Spark将当前的Task的Locality需求信息转换成Yarn的资源请求的细节。下面,我们结合代码,详细看一下localityOfRequestedContainers()方法的实现细节:
def localityOfRequestedContainers(
numContainer: Int, // 需要进行计算的container的数量,包括missing的,cancel掉的(本地性不符合任何task要求的pending container),以及对本地性没有要求的pending的container
numLocalityAwareTasks: Int, // 对locality有要求的task的数量,这个是Driver端通过stageIdToExecutorPlacementHints计算然后通过RequestExecutor传递过来的
hostToLocalTaskCount: Map[String, Int], // 在Stage提交了以后,这个map里面保存了从host到期望分配到这个host的task的数量,这个是Driver端通过stageIdToExecutorPlacementHints传递过来的
allocatedHostToContainersMap: HashMap[String, Set[ContainerId]], // 已经launch起来的host -> container的映射关系
localityMatchedPendingAllocations: Seq[ContainerRequest] // 对本地性有要求的pending的container
): Array[ContainerLocalityPreferences] = {
// 预期的从host到期望在上面再launch的新的container数量的映射关系
val updatedHostToContainerCount = expectedHostToContainerCount(
numLocalityAwareTasks, hostToLocalTaskCount, allocatedHostToContainersMap,
localityMatchedPendingAllocations)
// 希望再launch的所有Host上的container的数量之和,在这里的例子中,是15
val updatedLocalityAwareContainerNum = updatedHostToContainerCount.values.sum
// The number of containers to allocate, divided into two groups, one with preferred locality,
// and the other without locality preference.
// 没有locality需求的container的数量
val requiredLocalityFreeContainerNum =
math.max(0, numContainer - updatedLocalityAwareContainerNum)
// 有locality需求的container的数量
val requiredLocalityAwareContainerNum = numContainer - requiredLocalityFreeContainerNum
val containerLocalityPreferences = ArrayBuffer[ContainerLocalityPreferences]()
if (requiredLocalityFreeContainerNum > 0) { // 如果有container是没有locality需求的
for (i <- 0 until requiredLocalityFreeContainerNum) {
containerLocalityPreferences += ContainerLocalityPreferences( // 为这些没有locality需求的container一一创建container需求
null.asInstanceOf[Array[String]], null.asInstanceOf[Array[String]])
}
}
if (requiredLocalityAwareContainerNum > 0) { // 如果有container有locality需求
val largestRatio = updatedHostToContainerCount.values.max // 全局的所有host中最大的container数量
// Round the ratio of preferred locality to the number of locality required container
// number, which is used for locality preferred host calculating.
var preferredLocalityRatio = updatedHostToContainerCount.map { case(k, ratio) =>
val adjustedRatio = ratio.toDouble * requiredLocalityAwareContainerNum / largestRatio
(k, adjustedRatio.ceil.toInt) // 往上取整
}
// 每个有locality需求的的Container request,为他们确定对应的hosts和rack
for (i <- 0 until requiredLocalityAwareContainerNum) {
// Only filter out the ratio which is larger than 0, which means the current host can
// still be allocated with new container request.
val hosts = preferredLocalityRatio.filter(_._2 > 0).keys.toArray // 还有container可以分配的一个或者多个hosts
val racks = hosts.map { h =>
resolver.resolve(yarnConf, h) // 解析这些host所在的rack
}.toSet
// 每一个ContainerLocalityPreferences代表一个Container
containerLocalityPreferences += ContainerLocalityPreferences(hosts, racks.toArray)
// Minus 1 each time when the host is used. When the current ratio is 0,
// which means all the required ratio is satisfied, this host will not be allocated again.
preferredLocalityRatio = preferredLocalityRatio.map { case (k, v) => (k, v - 1) }
}
}
// containerLocalityPreferences中的每一项都会变成一个新的Container Request
containerLocalityPreferences.toArray
}
其参数的基本含义是:
-
numContainer: Int需要进行计算的Container的数量,即可能进行分配的Container数量,包括Miss的container(还没有申请的Container),Cancel掉的(本地性不符合任何task要求,因此已经从Yarn上取消的pending container)。同时,还包括Pending Container中对本地性没有要求的Container,这一部分Container也是我们重新申请的对象,以最大化Locality。上文讲到过的updateResourceRequests()方法中的potentialContainers就是传入到该方法的numContainers参数:// 将新的container请求,以及刚刚取消的container,作为available container val availableContainers = missing + cancelledContainers // to maximize locality, include requests with no locality preference that can be cancelled // 在availableContainers的基础上,再算上没有任何locality要求的并且还没有分配成功的container val potentialContainers = availableContainers + anyHostRequests.size -
numLocalityAwareTasks: Int对locality有要求的task的数量,这个是Driver端通过对stageIdToExecutorPlacementHints计算然后通过RequestExecutor传递过来的数值。已经说过,这是此时的全局状态量,而不是一个增量; -
hostToLocalTaskCount: Map[String, Int]在Stage提交了以后,这个map里面保存了从host到期望分配到这个host的task的数量,这个是Driver端通过stageIdToExecutorPlacementHints传递过来的,具体过程是:-
在Driver端,ExecutorAllocationManager的onStageSubmitted回调中,会将这个Stage的task preference存放在stageIdToExecutorPlacementHints中。
----------------------------------------- ExecutorAllocationManager ---------------------------------------- override def onStageSubmitted(stageSubmitted: SparkListenerStageSubmitted): Unit = { ..... // 计算这个stage在每一个host上的task数量 // Compute the number of tasks requested by the stage on each host var numTasksPending = 0 val hostToLocalTaskCountPerStage = new mutable.HashMap[String, Int]() stageSubmitted.stageInfo.taskLocalityPreferences.foreach { locality => // 对于每一个task的prefered location的list numTasksPending += 1 // 对于这个task的每一个 preferred location locality.foreach { location => // 对于这个locality中的每一个location // 这个host上的task的数量+1 val count = hostToLocalTaskCountPerStage.getOrElse(location.host, 0) + 1 hostToLocalTaskCountPerStage(location.host) = count } } // 这个map的key是stage id,value是一个元组,记录了这个stage的pending的task的数量,以及从host到task count的map信息 stageIdToExecutorPlacementHints.put(stageId, (numTasksPending, hostToLocalTaskCountPerStage.toMap)) updateExecutorPlacementHints() -
随后,ExecutorAllocationManager会有线程不断将这些信息通过RequestExecutors发送给远程的ApplicationMaster:
def start(): Unit = { listenerBus.addToManagementQueue(listener) val scheduleTask = new Runnable() { override def run(): Unit = { schedule() // 这里会根据需要更新numExecutorsTarget的数量,也会调用 } } executor.scheduleWithFixedDelay(scheduleTask, 0, intervalMillis, TimeUnit.MILLISECONDS) client.requestTotalExecutors(numExecutorsTarget, localityAwareTasks, hostToLocalTaskCount) }
-
-
allocatedHostToContainersMap: HashMap[String, Set[ContainerId]]已经launch起来的host -> container的映射关系。这是updateResource()方法每次通过Yarn的标准API allocate()向Yarn询问以后获取的结果。我们说过,allocate()接口用来向Yarn发送本次的资源请求,并返回当前Yarn为这个Application分配的Container的结果。由于Yarn端的资源分配是异步分配,因此allocate()返回的结果并非是这次请求的资源的分配结果,而是两次相邻的allocate()请求发生之间的新产生的资源分配结果; -
localityMatchedPendingAllocations: Seq[ContainerRequest]对本地性有要求的pending的container,其在方法splitPendingAllocationsByLocality()中对Pending的Container的Locality状态进行切分后,那些与当前请求的Task的Locality有交集的Pending Container将作为已经存在的Container,整个资源请求的目标,是使得新申请的Container和已经分配的Container加起来,其资源倾向和所有Task的统计倾向尽量匹配,从而最大程度满足Task的本地性需求。
localityOfRequestedContainers()算法的基本过程为:
-
计算每一个Host上应该新分配的Container的数量的预期值。由于是新分配的Container的预期值,因此需要先根据每个Host上的预期存在的Container的总的数量,减去该Host上已经存在的Container:
val updatedHostToContainerCount = expectedHostToContainerCount( numLocalityAwareTasks, hostToLocalTaskCount, allocatedHostToContainersMap, localityMatchedPendingAllocations)这里的计算,就是完成下表中从Sum of Tasks(每个机器上分配到的Task的比例) 到 Sum of Containers (每个机器上分配的Container的比例)的转换,然后根据Sum of Containers 减去每台机器上已经分配的Container,就得到了Average Allocated Container Total(每台机器上应该新分配的Container的数量):
Host 1 Host 2 Host 3 Host 4 20 Tasks 20 20 20 10 Tasks 10 10 10 Sum of Tasks 30 30 20 10 Sum of Containers 15 15 12 6 Allocated Container Target 5 5 4 2 Newly-Allocated Container 4 4 3 1 -
根据上面计算的分配结果,统计没有locality需求的Container的总数量和有locality需求的Container数量:
// 希望再launch的所有Host上的container的数量之和,在这里的例子中,是15 val updatedLocalityAwareContainerNum = updatedHostToContainerCount.values.sum // The number of containers to allocate, divided into two groups, one with preferred locality, // and the other without locality preference. // 没有locality需求的container的数量 val requiredLocalityFreeContainerNum = math.max(0, numContainer - updatedLocalityAwareContainerNum) // 有locality需求的container的数量 val requiredLocalityAwareContainerNum = numContainer - requiredLocalityFreeContainerNum -
先为 没有locality需求的Container 构造ContainerLocalityPreferences,每一个ContainerLocalityPreferences对象对应了一个Container请求和这个请求的Locality需求。可以看到,这种没有Locality需求的Container的Host 偏好和Rack 偏好都是空的:
val containerLocalityPreferences = ArrayBuffer[ContainerLocalityPreferences]() if (requiredLocalityFreeContainerNum > 0) { // 如果有container是没有locality需求的 for (i <- 0 until requiredLocalityFreeContainerNum) { containerLocalityPreferences += ContainerLocalityPreferences( // 为这些没有locality需求的container一一创建container需求 null.asInstanceOf[Array[String]], null.asInstanceOf[Array[String]]) } } -
为 有locality需求的Container 构造ContainerLocalityPreferences对象,每一个ContainerLocalityPreferences对象封装了这个Container请求和这个请求的Locality需求:
4.1 这里需要完成比较难以理解的Container请求的比例放大,保证比例最大的那个Host(这里是Host1 和 Host 2)的比例值是需要申请的Container的数量,以满足随后为每一个Container构造其Locality信息的过程:
var preferredLocalityRatio = updatedHostToContainerCount.map { case(k, ratio) => val adjustedRatio = ratio.toDouble * requiredLocalityAwareContainerNum / largestRatio (k, adjustedRatio.ceil.toInt) // 往上取整 }如下图所示,这里就是完成Round Up 这一步骤,将需要新分配的Container数量成比例放大,保证Container比例最大的Host(这里是Host1 和 Host 2)放大以后的值刚好等于需要分配的有Locality Preference 的 Container的总数量。
Host 1 Host 2 Host 3 Host 4 20 Tasks 20 20 20 10 Tasks 10 10 10 Sum of Tasks 30 30 20 10 Sum of Containers 15 15 10 5 Allocated Container Target 5 5 4 2 Newly Allocated Container 4 4 3 1 Round Up 12 12 9 3 4.2 放大完成以后,开始进行分配。
当前有12 个Container需要分配,每一个Host的分配比例为(12,12,9,3)。分配过程上文已经经过,其代码如下:// 每个有locality需求的的Container request,为他们确定对应的hosts和rack for (i <- 0 until requiredLocalityAwareContainerNum) { // Only filter out the ratio which is larger than 0, which means the current host can // still be allocated with new container request. val hosts = preferredLocalityRatio.filter(_._2 > 0).keys.toArray // 还有container可以分配的一个或者多个hosts val racks = hosts.map { h => resolver.resolve(yarnConf, h) // 解析这些host所在的rack }.toSet // 每一个ContainerLocalityPreferences代表一个Container containerLocalityPreferences += ContainerLocalityPreferences(hosts, racks.toArray) // Minus 1 each time when the host is used. When the current ratio is 0, // which means all the required ratio is satisfied, this host will not be allocated again. preferredLocalityRatio = preferredLocalityRatio.map { case (k, v) => (k, v - 1) } }
申请资源以后的处理:Executor的启动或者结束
上面讲过,资源调度的入口方法allocateResources()会通过updateResourceRequests()来计算所需资源并向Yarn进行资源的更新,包括申请新的资源、释放无用的资源等:
def allocateResources(): Unit = synchronized {
updateResourceRequests() //
val allocateResponse = amClient.allocate(progressIndicator)
val allocatedContainers = allocateResponse.getAllocatedContainers()
handleAllocatedContainers(allocatedContainers.asScala)
val completedContainers = allocateResponse.getCompletedContainersStatuses()
processCompletedContainers(completedContainers.asScala)
}
}
通过调用Yarn的标准API allocate(),获取了资源分配的结果。再次强调,Yarn这一端的资源调度是异步调度,因此这个资源分配的结果并不是刚刚通过addContainerRequest()进行资源申请的结果,只是调用者在两次调用allocate() API的之间Yarn对于这个Application的新的资源分配结果。拿到了分配的Container,Spark就可以将Executor启动起来了(注意,是启动一个空的Executor,不是启动Task)。启动起来的Executor随后就会向DriverEndpoint注册自己,通信的详细过程参考TODO。这里不再赘述。
对分配结果的处理,主要是处理已经分配的Container以及已经运行结束的Container:
val allocatedContainers = allocateResponse.getAllocatedContainers()
handleAllocatedContainers(allocatedContainers.asScala)
val completedContainers = allocateResponse.getCompletedContainersStatuses()
processCompletedContainers(completedContainers.asScala)
- 对于已经分配的Container,需要从Yarn的AMRMClient中将对应的资源请求删除,避免对同一个资源进行多次重复申请,然后启动对应的Executor。
- 对于已经完成的Container,需要根据Container的退出状态,记录相关日志,同时,需要向Driver发送RemoveExecutor消息告知Driver这个Container的结束,Driver端会进行相关状态的维护。
对于新启动的Container的处理
对于一个刚刚分配成功的Container,其处理工作主要包括两个
- 一是从AMRMClient中将对应的资源请求删除,避免同一资源请求的Container被重复申请;
- 然后,在远程的NodeManager节点上启动Container。
这些过程在方法handleAllocatedContainers()中进行:
--------------------------------- YarnAllocator --------------------------------------
def handleAllocatedContainers(allocatedContainers: Seq[Container]): Unit = {
val containersToUse = new ArrayBuffer[Container](allocatedContainers.size)
// 先处理Host Match的Container
val remainingAfterHostMatches = new ArrayBuffer[Container]
for (allocatedContainer <- allocatedContainers) {
matchContainerToRequest(allocatedContainer, allocatedContainer.getNodeId.getHost,
containersToUse, remainingAfterHostMatches)
}
// 处理Host Match以后剩余的Container
val remainingAfterRackMatches = new ArrayBuffer[Container]
for (allocatedContainer <- remainingAfterHostMatches) {
val rack = resolver.resolve(conf, allocatedContainer.getNodeId.getHost)
matchContainerToRequest(allocatedContainer, rack, containersToUse,
remainingAfterRackMatches)
}
// 处理Host Match和Rack Match以后剩余的Container
val remainingAfterOffRackMatches = new ArrayBuffer[Container]
for (allocatedContainer <- remainingAfterRackMatches) {
matchContainerToRequest(allocatedContainer, ANY_HOST, containersToUse,
remainingAfterOffRackMatches)
}
// 在Host Match,Rack Match,以及ANY_HOST Match以后,依然还有剩余的Container,这只能是Bug
if (!remainingAfterOffRackMatches.isEmpty) {
for (container <- remainingAfterOffRackMatches) {
internalReleaseContainer(container)
}
}
/**
* 在这里会打印 Launching container container_1714042499037_5294_01_000002 on host
*/
runAllocatedContainers(containersToUse)
}
- 遍历每一个分配的Container,在AMRMClient端找到跟这个Container所在的机器相匹配的资源请求,将这个资源请求AMRMClient中删除。这个删除操作并不会和远程的ResourceManager通信,因为这些资源请求都通过addContainerRequest() API被AMRMClient保存在本地然后通过allocate() API发送给远程的RM的。因此对应请求的删除是在AMRMClient的本地进行的:
其中,val remainingAfterHostMatches = new ArrayBuffer[Container] for (allocatedContainer <- allocatedContainers) { matchContainerToRequest(allocatedContainer, allocatedContainer.getNodeId.getHost, containersToUse, remainingAfterHostMatches) }matchContainerToRequest()方法就是根据这个分配成功的Container的特性(Priority,VCore, CPU,Host Location),从AMRMClient中删除对应的ResourceRequest。未删除的Container保存在参数remainingAfterHostMatches中:--------------------------------- YarnAllocator -------------------------------------- private def matchContainerToRequest( allocatedContainer: Container, location: String, containersToUse: ArrayBuffer[Container], remaining: ArrayBuffer[Container]): Unit = { // 这个Container的资源特性 val matchingResource = Resource.newInstance(allocatedContainer.getResource.getMemory, resource.getVirtualCores) // 以Priority,Resource(VCore, Memory),location作为ID,删除这个Container对应的资源请求 val matchingRequests = amClient.getMatchingRequests(allocatedContainer.getPriority, location, matchingResource) if (!matchingRequests.isEmpty) { // 匹配成功 val containerRequest = matchingRequests.get(0).iterator.next amClient.removeContainerRequest(containerRequest) // 从AMRMClient中删除 containersToUse += allocatedContainer } else { remaining += allocatedContainer // 未匹配的Container放入remaining,接着进行其他匹配 } } - 遍历剩下的在Host级别没有匹配成功的剩余的Container,在Rack级别进行Container和ResourceRequest 的匹配,并将匹配不成功的Container保存在remainingAfterRackMatches中:
val remainingAfterRackMatches = new ArrayBuffer[Container] for (allocatedContainer <- remainingAfterHostMatches) { /** * SparkRackResolver. */ val rack = resolver.resolve(conf, allocatedContainer.getNodeId.getHost) matchContainerToRequest(allocatedContainer, rack, containersToUse, remainingAfterRackMatches) } - 遍历剩下的在Rack级别没有匹配成功的剩余的Container,在ANY_HOST(忽略本地偏好)级别进行Container和ResourceRequest 的匹配(这种ResourceRequest是那种没有Locality需求的ResourceRequest),并将匹配不成功的Container保存在remainingAfterRackMatches
// Assign remaining that are neither node-local nor rack-local val remainingAfterOffRackMatches = new ArrayBuffer[Container] for (allocatedContainer <- remainingAfterRackMatches) { matchContainerToRequest(allocatedContainer, ANY_HOST, containersToUse, remainingAfterOffRackMatches) } - 如果有的已经分配的Container无论是Host、Rack还是ANY_HOST偏好都没有在AMRMClient本地找到他们匹配的资源请求(注释中说,这是由于Yarn本身的竞争导致的bug),那么释放这些Container:
if (!remainingAfterOffRackMatches.isEmpty) { for (container <- remainingAfterOffRackMatches) { internalReleaseContainer(container) } } - 资源请求释放完毕以后,通过方法
runAllocatedContainers()逐个启动每一个Container。
5.1 在线程池中启动一个ExecutorRunnable。ExecutorRunnable会负责和NodeManager进行通信,在对应节点上将Container启动起来;---------------------------------- YarnAllocator ---------------------------------------- private def runAllocatedContainers(containersToUse: ArrayBuffer[Container]): Unit = { for (container <- containersToUse) { // 对于已经allocate并且资源已经匹配的container executorIdCounter += 1 val executorHostname = container.getNodeId.getHost val containerId = container.getId val executorId = executorIdCounter.toString // 分配executorId def updateInternalState(): Unit = synchronized { numExecutorsRunning.incrementAndGet() numExecutorsStarting.decrementAndGet() executorIdToContainer(executorId) = container // executor 和 container的映射关系 containerIdToExecutorId(container.getId) = executorId // container 和 executor 的映射关系 /** * Container launch起来以后,更新allocatedHostToContainersMap */ val containerSet = allocatedHostToContainersMap.getOrElseUpdate(executorHostname, new HashSet[ContainerId]) containerSet += containerId allocatedContainerToHostMap.put(containerId, executorHostname) } numExecutorsStarting.incrementAndGet() launcherPool.execute(new Runnable { override def run(): Unit = { try { new ExecutorRunnable( ........ ).run() // 运行ExecutorRunnable,用来和NodeManager通信来启动Container updateInternalState() } }) } }
5.2 在ExecutorRunnable启动以后,由于新的Container的加入,更新相关元数据信息,包括executor -> container,container -> executor, container -> host, host -> container的映射关系,这是通过内部方法updateInternalState()来负责的:launcherPool.execute(new Runnable { override def run(): Unit = { try { new ExecutorRunnable( Some(container), conf, sparkConf, driverUrl, executorId, executorHostname, executorMemory, executorCores, appAttemptId.getApplicationId.toString, securityMgr, localResources ).run()---------------------------------- YarnAllocator ---------------------------------------- def updateInternalState(): Unit = synchronized { numExecutorsRunning.incrementAndGet() numExecutorsStarting.decrementAndGet() executorIdToContainer(executorId) = container // executor 和 container的映射关系 containerIdToExecutorId(container.getId) = executorId // container 和 executor 的映射关系 /** * Container launch起来以后,更新allocatedHostToContainersMap */ val containerSet = allocatedHostToContainersMap.getOrElseUpdate(executorHostname, new HashSet[ContainerId]) containerSet += containerId allocatedContainerToHostMap.put(containerId, executorHostname) }
对于结束的Container的处理
对于结束的Container的处理在方法processCompletedContainers()中进行:
---------------------------------- YarnAllocator ----------------------------------------
private[yarn] def processCompletedContainers(completedContainers: Seq[ContainerStatus]): Unit = {
for (completedContainer <- completedContainers) {
val containerId = completedContainer.getContainerId
val alreadyReleased = releasedContainers.remove(containerId) // alreadyReleased记录这个Container是否已经被释放
val hostOpt = allocatedContainerToHostMap.get(containerId)
val onHostStr = hostOpt.map(host => s" on host: $host").getOrElse("")
val exitReason = if (!alreadyReleased) { // 这个Container还没有释放,那么走释放流程
// Decrement the number of executors running. The next iteration of
// the ApplicationMaster's reporting thread will take care of allocating.
numExecutorsRunning.decrementAndGet()
// Hadoop 2.2.X added a ContainerExitStatus we should switch to use
// there are some exit status' we shouldn't necessarily count against us, but for
// now I think its ok as none of the containers are expected to exit.
val exitStatus = completedContainer.getExitStatus
val (exitCausedByApp, containerExitReason) = exitStatus match {
case ContainerExitStatus.SUCCESS =>
.....
case ContainerExitStatus.PREEMPTED =>
....
case VMEM_EXCEEDED_EXIT_CODE =>
....
case PMEM_EXCEEDED_EXIT_CODE =>
....
}
if (exitCausedByApp) {
logWarning(containerExitReason)
} else {
logInfo(containerExitReason)
}
ExecutorExited(exitStatus, exitCausedByApp, containerExitReason)
} else {
// 如果我们释放了这个Container,那么说明一定是Driver直接通过 killExecutor
// 释放掉了这个Container,而不是它自行结束
ExecutorExited(completedContainer.getExitStatus, exitCausedByApp = false,
s"Container $containerId exited from explicit termination request.")
}
// 解除host -> container 以及 container -> host mapping
for {
host <- hostOpt // 这个Container对应的Host
containerSet <- allocatedHostToContainersMap.get(host) // 这个Container对应的Host上的所有container
} {
containerSet.remove(containerId) // 删除这个container
if (containerSet.isEmpty) { // 这个container是这个host上的最后一个container
allocatedHostToContainersMap.remove(host) // 删除host
} else {
allocatedHostToContainersMap.update(host, containerSet)
}
allocatedContainerToHostMap.remove(containerId) // 解除container -> host map
}
// 解除container -> executor mapping
containerIdToExecutorId.remove(containerId).foreach { eid =>
executorIdToContainer.remove(eid)
....
if (!alreadyReleased) {
// The executor could have gone away (like no route to host, node failure, etc)
// Notify backend about the failure of the executor
numUnexpectedContainerRelease += 1
driverRef.send(RemoveExecutor(eid, exitReason))
}
}
}
}
可以看到,方法processCompletedContainers()会遍历Yarn返回的每一个Completed(注意,Completed只是代表Container运行结束,但是运行结果可能是Succeed可能是Fail),然后逐个处理:
-
如果Container此时并没有被释放,说明Container是自行结束,而不是Driver所杀死的。根据Container的退出状态和退出原因,打印日志:
val alreadyReleased = releasedContainers.remove(containerId) // alreadyReleased记录这个Container是否已经被释放 val exitReason = if (!alreadyReleased) { val alreadyReleased = releasedContainers.remove(containerId) // alreadyReleased记录这个Container是否已经被释放 val exitStatus = completedContainer.getExitStatus val (exitCausedByApp, containerExitReason) = exitStatus match { case ContainerExitStatus.SUCCESS => ..... case ContainerExitStatus.PREEMPTED => .... case VMEM_EXCEEDED_EXIT_CODE => .... case PMEM_EXCEEDED_EXIT_CODE => .... } if (exitCausedByApp) { logWarning(containerExitReason) } else { logInfo(containerExitReason) } } -
如果我们发现这个Container已经在ReleasedContainer中存在,说明只能是Driver通过KillExecutor的方式将Container给Release了,而不是Container自行退出:
// 如果我们释放了这个Container,那么说明一定是Driver直接通过 killExecutor // 释放掉了这个Container,而不是它自行结束 ExecutorExited(completedContainer.getExitStatus, exitCausedByApp = false, s"Container $containerId exited from explicit termination request.")如果是Driver杀死了Executor,Driver会向AMEndpoint发送KillExecutor消息,AMEndpoint会将这个Executor从其维护的元数据信息中删除,将这个Kill掉的Executor的Container添加到
releasedContainers中,同时通过AMRMClient向Yarn发送释放container的请求:def killExecutor(executorId: String): Unit = synchronized { val container = executorIdToContainer.get(executorId).get internalReleaseContainer(container) numExecutorsRunning.decrementAndGet() } private def internalReleaseContainer(container: Container): Unit = { releasedContainers.add(container.getId()) // 将这个Container从releasedContainer中删除 amClient.releaseAssignedContainer(container.getId()) // 向Yarn发送释放Container的请求 } -
删除这个Container和Host之间的映射关系,包括Host -> Container的映射关系以及反向的Container-> Host的映射关系
for { host <- hostOpt // 这个Container所在的Hosts containerSet <- allocatedHostToContainersMap.get(host) // 这个Host上的所有Container } { containerSet.remove(containerId) if (containerSet.isEmpty) { allocatedHostToContainersMap.remove(host) } else { allocatedHostToContainersMap.update(host, containerSet) } allocatedContainerToHostMap.remove(containerId) } -
删除Container和Executor之间的映射关系,同时,如果不是Driver主动release的这个container,那么会向Driver发送RemoveExecutor消息
containerIdToExecutorId.remove(containerId).foreach { eid => executorIdToContainer.remove(eid) ........ if (!alreadyReleased) { // 这个Container不是Driver自行释放的,那么需要像Driver汇报一个RemoveExecutor消息 driverRef.send(RemoveExecutor(eid, exitReason)) }
基于资源分配结果进行任务调度
上面讲到对于新分配的Container的处理,在收到Yarn返回的分配的Container以后,ApplicationMaster会启动对应的Executor。这些Executor启动以后,会向Driver注册自己以告知Driver自己的存在,Driver进而将Task调度到Executor中。
其实,Task的调度的触发不仅仅是新分配了Container或者新Launch了Executor,基本上在集群的资源可能发生变化的情况下,都会触发Task的调度,因此,Task的调度是一个不断将Pending Task与可用资源进行匹配然后调度出去的过程。
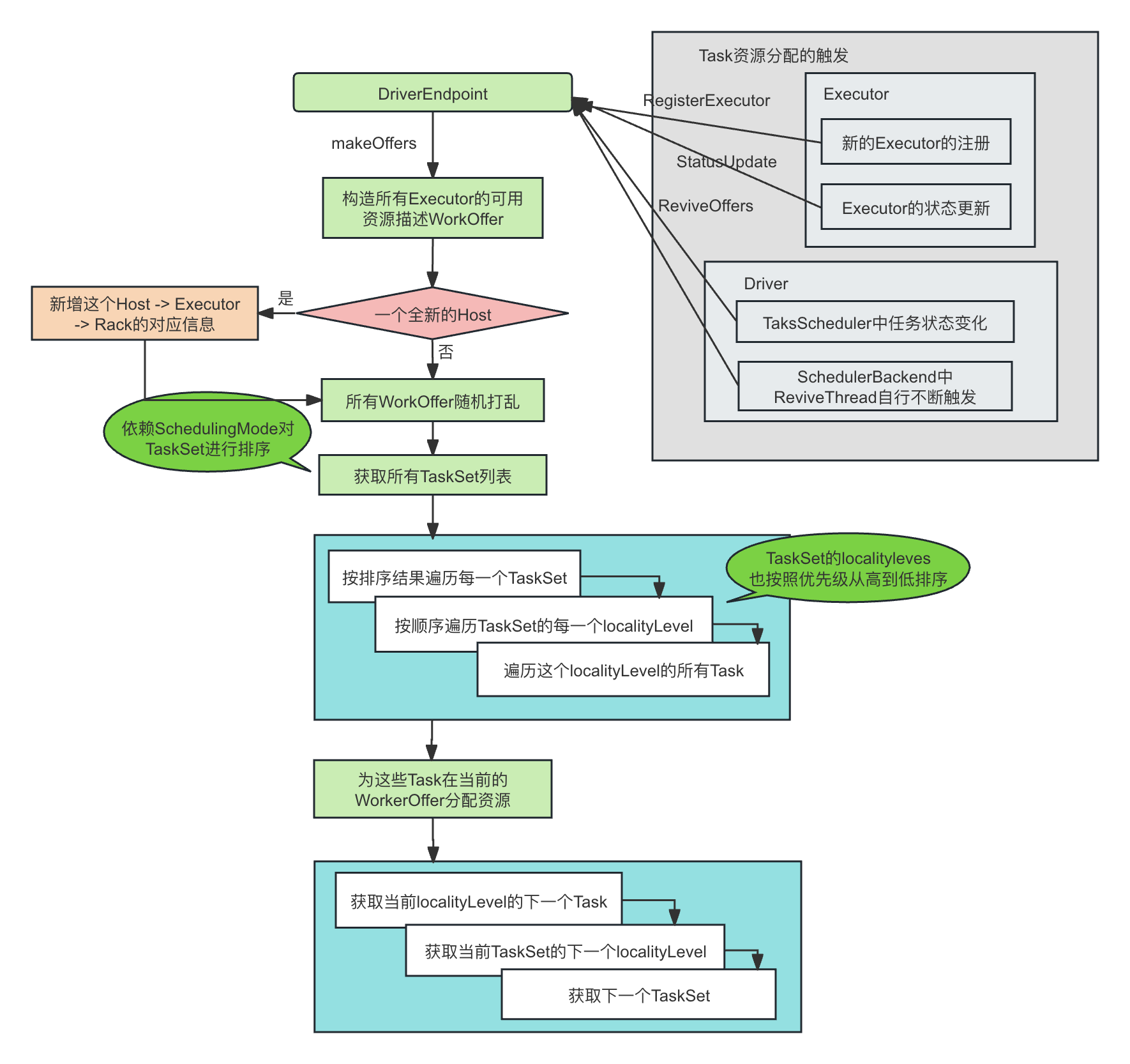
我列举了下面四种可以触发Driver端的CoarseGrainedSchedulerBackend通过运行makeOffers(或者只针对某一个Executor的makeOffer)来进行任务调度:
-
来自Executor的注册:上面说过Executor启动以后会向Driver注册自己。此时,Driver认为集群中有了新的可用资源,因此尝试进行Task到Executor的调度。Executor的注册是通过Executor启动的时候向DriverEndpoint发送RegisterExecutor消息来触发的。
Driver将Executor能够提供的可用资源(Memory , CPU)叫做Resource Offer。因此,当收到了新的Executor的注册,Driver端会调用makeOffers()方法,为这个Executor生成对应的WorkerOffer,代表这个Executor剩余可用的CPU和Memory:
------------------------------------ DriverEndpoint ------------------------------- override def receiveAndReply(context: RpcCallContext): PartialFunction[Any, Unit] = { // 收到 RegisterExecutor 请求,这个请求发生在Executor启动以后,向Driver发送的信息 case RegisterExecutor(executorId, executorRef, hostname, cores, logUrls) => ...... executorRef.send(RegisteredExecutor) ..... makeOffers() // 尝试进行task的调度,针对所有可用的executor } -
来自Executor的StatusUpdate:在Executor上Task的运行状态发生变化,都会告知Driver,Driver认为此时集群的资源状态发生了变化,因此尝试进行一次task的调度。但是这次的Task的调度是针对这个Executor的,即只会调度适合运行在这个Executor上的Pending Task到这个Exeuctor上:
------------------------------------ DriverEndpoint ----------------------------------- override def receive: PartialFunction[Any, Unit] = { case StatusUpdate(executorId, taskId, state, data) => scheduler.statusUpdate(taskId, state, data.value) if (TaskState.isFinished(state)) { executorDataMap.get(executorId) match { case Some(executorInfo) => executorInfo.freeCores += scheduler.CPUS_PER_TASK makeOffers(executorId) // 尝试进行Task的调度,但是只针对这一个Executor ... } -
来自TaskScheduler中的任务的相关变化,比如,Task的提交,Executor的丢失,Task的失败,推测执行等等,由于系统的可用资源发生了变化,因此TaskScheduler都会通过向DriverEndpoint发送ReviveOffers消息,以触发新一轮的Pending Task的调度。
----------------------------------- DriverEndpoint -------------------------------- override def receive: PartialFunction[Any, Unit] = { ..... case ReviveOffers => makeOffers() -
来自SchedulerBackend的自我触发:在DriverEndpoint作为一个RpcEndpoint启动的时候,会启动一个ReviveThread,以固定频率,向自己发送ReviveOffers的本地消息(发送给自己),以触发Pending 的 Task到Container的调度:
-------------------------------- DriverEndpoint --------------------------------------- override def onStart() { // 定期恢复offer,以允许延迟调度工作 // Periodically revive offers to allow delay scheduling to work val reviveIntervalMs = conf.getTimeAsMs("spark.scheduler.revive.interval", "1s") reviveThread.scheduleAtFixedRate(new Runnable { override def run(): Unit = Utils.tryLogNonFatalError { Option(self).foreach(_.send(ReviveOffers)) } }, 0, reviveIntervalMs, TimeUnit.MILLISECONDS) }
在以Locality为考虑重点的Task的调度,就是根据locality从高到低(executor-local 优先级最高),参照当前允许的优先级,取出对应的Task进行调度。如果当前优先级的Task已经调度完毕,或者当前locality的一部分或者全部Task经过了很久还没有完成调度(即当前的系统资源无法完全满足当前的locality需求),那么就需要降低locality再次尝试进行调度。
下文会详细讲解makeOffers()的具体流程。
PendingTask的生成:
Task的调度的重要逻辑是满足Task 的Location Preference, 即每一个Task对运行位置 (Executor, Host, Rack等等)上的偏好。我们先看看TaskLocation的含义和生成过程,然后看看Spark的Driver是怎样通过Locality-Aware的调度方式,尽最大可能满足每一个Task的本地性需求。
TaskLocation详解
在Spark中,一个Task的Location归根结底是由这个Task的Split决定的,Split代表了一个切分,比如,对一个HDFS文件的切分。在Hadoop上,一个Split表示为一个InputSplit接口的实现类的一个实例。
一个HDFS文件的一个Split是由FileSplit对象表达,对象中hostInfos存放了一个SplitLocationInfo数组,每一个SplitLocationInfo对象存放了一个这个Split的一个Replica的Location信息(因为在HDFS上文件是多副本的),包括具体的Hostname(即DataNode所在的节点)以及这个Host是否在内存中缓存了这个Split的标记位。
当然,在HDFS的维度,我们说一个Split被缓存,其实缓存的是这个Split对应的Replica。在Hadoop中一个文件的Split对应一个FileSplit对象,代码如下:
--------------------------------------- FileSplit ------------------------------------------------
public FileSplit(Path file, long start, long length, String[] hosts,
String[] inMemoryHosts) {
this(file, start, length, hosts);
hostInfos = new SplitLocationInfo[hosts.length];
for (int i = 0; i < hosts.length; i++) {
// because N will be tiny, scanning is probably faster than a HashSet
boolean inMemory = false;
for (String inMemoryHost : inMemoryHosts) {
if (inMemoryHost.equals(hosts[i])) {
inMemory = true;
break;
}
}
hostInfos[i] = new SplitLocationInfo(hosts[i], inMemory);
}
}
其中,一个Replica的Location信息对应了一个SplitLocationInfo对象,包含了这个Split是否在对应的Host上缓存了,以及,对应的Host(DataNode) 信息。在多副本的环境下,一个FileSplit对应的是一个数组 SplitLocationInfo[]:
------------------------------------------ SplitLocationInfo -----------------------------------------
public class SplitLocationInfo {
private boolean inMemory;
private String location;
public SplitLocationInfo(String location, boolean inMemory) {
this.location = location;
this.inMemory = inMemory;
}
我们看一下Spark在提交Stage和Task的过程中是怎么获取Task的Location信息的,以及在获取以后是如何基于Location调度Task的。
在HDFS的场景下,Spark是将每一个Stage对应的RDD(一个NewHadoopRDD对象)中的Partition(一个NewHadoopPartition对象)的Location信息(如果有)存放在这个NewHadoopPartition的serializableHadoopSplit中,其实是对InputSplit的封装:
--------------------------------------- NewHadoopPartition ------------------------------------
private[spark] class NewHadoopPartition(
rddId: Int,
val index: Int,
rawSplit: InputSplit with Writable) // 这个HadoopPartition对应的InputSplit
extends Partition {
val serializableHadoopSplit = new SerializableWritable(rawSplit)
Stage以及Partition的生成是在提交以前进行的,即执行计划的生成阶段形成的。那么,到了Stage的提交阶段,是怎么利用Stage和Partition中的Location信息,生成具有Location Preference的Task信息的呢?我们看看Stage提交的时候是如何使用Partition的Location信息的。
下面的这段代码是一段经典代码,Spark中DagScheduler提交Stage的时候,会首先检查这个Stage是否有未提交的Parent Stage:
- 如果有,会首先递归提交Parent Stage,然后把当前Stage放入到waitingStages中。waitingStage指的是那些parentStage还没有完成、因此需要等待的Stage;
- 如果没有Missing Parent Stage,那么就可以提交当前的Stage:
/** Submits stage, but first recursively submits any missing parents. */
private def submitStage(stage: Stage) {
val jobId = activeJobForStage(stage)
if (jobId.isDefined) {
if (!waitingStages(stage) && !runningStages(stage) && !failedStages(stage)) {
val missing = getMissingParentStages(stage).sortBy(_.id)
if (missing.isEmpty) { // 没有missing parent stage,那么提交这个Stage的所有task
submitMissingTasks(stage, jobId.get)
} else {
for (parent <- missing) { // 有missing parent stage,那么先提交
submitStage(parent)
}
waitingStages += stage // 将当前stage放入到waitingStages中随后提交
}
}
}
}
在提交Stage的时候,会提交这个Stage所有的Task。我们忽略其他细节,从下面的代码可以看到,Spark会通过方法getPreferredLocs()针对这个Stage的每一个Partition获取这个Partition的Location信息,放到一个taskIdToLocations: Map[Int, Seq[TaskLocation]]中,然后,会提交这些已经带有Location信息的Task:
-------------------------------------- DAGScheduler --------------------------------------
/** Called when stage's parents are available and we can now do its task. */
private def submitMissingTasks(stage: Stage, jobId: Int) {
// First figure out the indexes of partition ids to compute.
val partitionsToCompute: Seq[Int] = stage.findMissingPartitions()
.....
val taskIdToLocations: Map[Int, Seq[TaskLocation]] = try {
stage match {
case s: ShuffleMapStage =>
// 计算每一个partition(这里的partition就是一个task)的prefered location的list
partitionsToCompute.map { id => (id, getPreferredLocs(stage.rdd, id))}.toMap
case s: ResultStage =>
partitionsToCompute.map { id =>
val p = s.partitions(id) // ResultStage.partitions中存放的是对应的partition id
(id, getPreferredLocs(stage.rdd, p))
}.toMap
}
}
// 在获取了这个Stage的每一个task的location preference信息(如果有)以后,创建一个新的Stage Attempt
// 随后,在调度这个Stage的task的时候,这个task中就包含了对应的location preference
stage.makeNewStageAttempt(partitionsToCompute.size, taskIdToLocations.values.toSeq)
// 提交这个Stage。基于listenerBus的事件触发机制,调度方法就会将包含了Location Preference的Task调度出去
listenerBus.post(SparkListenerStageSubmitted(stage.latestInfo, properties))
.......
val tasks: Seq[Task[_]] = try {
val serializedTaskMetrics = closureSerializer.serialize(stage.latestInfo.taskMetrics).array()
stage match {
case stage: ShuffleMapStage =>
stage.pendingPartitions.clear()
partitionsToCompute.map { id =>
val locs = taskIdToLocations(id)
val part = partitions(id)
stage.pendingPartitions += id
new ShuffleMapTask(stage.id, stage.latestInfo.attemptNumber,
taskBinary, part, locs, properties, serializedTaskMetrics, Option(jobId),
Option(sc.applicationId), sc.applicationAttemptId)
}
case stage: ResultStage =>
partitionsToCompute.map { id =>
val p: Int = stage.partitions(id)
val part = partitions(p)
val locs = taskIdToLocations(id)
new ResultTask(stage.id, stage.latestInfo.attemptNumber,
taskBinary, part, locs, id, properties, serializedTaskMetrics,
Option(jobId), Option(sc.applicationId), sc.applicationAttemptId)
}
}
}
if (tasks.size > 0) {
// 提交task
taskScheduler.submitTasks(new TaskSet(
tasks.toArray, stage.id, stage.latestInfo.attemptNumber, jobId, properties))
}
}
submitMissingTasks()方法的基本过程为:
- 获取这个Stage需要进行计算的所有partitions信息
这里,ResultStage和ShuffledMapStage对于findMissingPartitions()的实现有区别,主要是ResultStage中有些函数需要使用的Partition数量不等于这个ResultStage对应的rdd的partition的数量,比如我们常见的// First figure out the indexes of partition ids to compute. val partitionsToCompute: Seq[Int] = stage.findMissingPartitions()first()、last()等。所以,ResultsStage有一个partitions数组,数组中的每一个值代表其实际需要使用的partition id:
所以,对于ResultStage.findMissingPartitions()方法,其返回的是ResultStage.partitions的index的集合,ResultStage.partitions中在索引index处存放的是对应的Partition ID。比如,ResultStage.partitions[0] = 2,意味着Partition ID = 2。而对于ShuffleMapStage,返回的直接就是ShuffleMapStage的RDD的partitions数组,这个数组中,index 和 value是相同的,即索引0的位置存放的是partition 0,索引1的位置存放的是partition 1.private[spark] class ResultStage( id: Int, rdd: RDD[_], val func: (TaskContext, Iterator[_]) => _, val partitions: Array[Int], // 实际需要的partition,partitions数组中的每一个值是实际使用的partition在rdd.partitions中的partition id parents: List[Stage], firstJobId: Int, callSite: CallSite) extends Stage(id, rdd, partitions.length, parents, firstJobId, callSite) {------------------------------------ ResultStage ------------------------------------------ override def findMissingPartitions(): Seq[Int] = { val job = activeJob.get // 如果是ResultStage,那么实际参与计算的numPartitions不一定等于stage.rdd.partitions, // 因为像first() last()这种function不需要所有的partition参与 // 但是对于ShuffleMapStage,stage.rdd中所有的partition都需要参与计算 (0 until job.numPartitions).filter(id => !job.finished(id)) }-------------------------------------- ShuffleMapStage ----------------------------------- val numPartitions = rdd.partitions.length // 对于ShuffleMapStage,numPartitions就是这个Stage对应的RDD的partitions的长度 override def findMissingPartitions(): Seq[Int] = { mapOutputTrackerMaster .findMissingPartitions(shuffleDep.shuffleId) .getOrElse(0 until numPartitions) }---------------------------------- ActiveJob --------------------------------------- /** * 我们需要为这个job计算的partition的数量. 必须注意,ResultStage可能并不需要计算目标RDD中所有的partition,比如first()或者lookup()等函数 */ val numPartitions = finalStage match { // ResultStage的partiton数量直接使用ResultStage构造的时候所传入的Partition的数量,这个partitions是ResultStage对应的rdd或者是它的子集 case r: ResultStage => r.partitions.length // 对于ShuffleMapStage,它的partitino数量就是对应的ShuffleMapStage.RDD.partitions的长度 case m: ShuffleMapStage => m.rdd.partitions.length } - 生成从partitionID 到 对应的Prefered Location的映射关系,遍历这个Stage的所有Partition,从Partition中提取出对应的Location Preference,生成一个从Task 到 Seq[TaskLocation]的映射关系。每一个Task对应了多个TaskLocation,每一个 TaskLocation对应了一个位置信息。基于上面讲到的ResultStage的特殊性,它和ShuffleMapStage在获取Partition ID的时候不同:
- 如果是ShuffleMapStage,这个index就是Partition ID,所以直接调用了
id, getPreferredLocs(stage.rdd, id); - 如果是ResultStage,由于上面讲到的原因,需要先通过
val p = s.partitions(id),获取这个index对应的Partition ID,
val taskIdToLocations: Map[Int, Seq[TaskLocation]] = try { stage match { case s: ShuffleMapStage => // 计算每一个partition(这里的partition就是一个task)的prefered location的list partitionsToCompute.map { id => (id, getPreferredLocs(stage.rdd, id))}.toMap case s: ResultStage => partitionsToCompute.map { id => val p = s.partitions(id) // 这里的id其实只是ResultStage.partitions的索引,对应的值才是Partition ID (id, getPreferredLocs(stage.rdd, p)) }.toMap } } - 如果是ShuffleMapStage,这个index就是Partition ID,所以直接调用了
- 创建一个新的Stage Attempt。一次Stage Attempt代表的就是一次Stage的运行,如果Stage运行失败需要重试,那么就进入下一个 Stage Attempt。这里主要是更新Stage中的
_latestInfostage.makeNewStageAttempt(partitionsToCompute.size, taskIdToLocations.values.toSeq)----------------------------------------- Stage ------------------------------------------ def makeNewStageAttempt( numPartitionsToCompute: Int, taskLocalityPreferences: Seq[Seq[TaskLocation]] = Seq.empty): Unit = { val metrics = new TaskMetrics metrics.register(rdd.sparkContext) // taskLocalityPreferences是这一个Seq[Seq[TaskLocation]],代表了每一个task的prefered location, // 一个task的prefered location可能不止一个 _latestInfo = StageInfo.fromStage( this, nextAttemptId, Some(numPartitionsToCompute), metrics, taskLocalityPreferences) nextAttemptId += 1 } - 为这个Stage生成对应的Task(只是生成,还没有提交)
构造Task的时候,对应的Location Preference信息存入了Task对象的val tasks: Seq[Task[_]] = try { val serializedTaskMetrics = closureSerializer.serialize(stage.latestInfo.taskMetrics).array() stage match { case stage: ShuffleMapStage => stage.pendingPartitions.clear() partitionsToCompute.map { id => val locs = taskIdToLocations(id) val part = partitions(id) stage.pendingPartitions += id new ShuffleMapTask(stage.id, stage.latestInfo.attemptNumber, taskBinary, part, locs, properties, serializedTaskMetrics, Option(jobId), Option(sc.applicationId), sc.applicationAttemptId) } case stage: ResultStage => partitionsToCompute.map { id => val p: Int = stage.partitions(id) val part = partitions(p) val locs = taskIdToLocations(id) new ResultTask(stage.id, stage.latestInfo.attemptNumber, taskBinary, part, locs, id, properties, serializedTaskMetrics, Option(jobId), Option(sc.applicationId), sc.applicationAttemptId) } } }locs成员中,通过调用preferredLocs可以获取这个Task的Location Preference,随后,Spark根据Task的preferredLocs进行资源请求,并且在申请到了资源以后,根据preferredLocs将Task调度到合适的Executor上去:private[spark] class ShuffleMapTask( stageId: Int, stageAttemptId: Int, taskBinary: Broadcast[Array[Byte]], partition: Partition, // Partition @transient private var locs: Seq[TaskLocation], // Location Preference ...... ) // 获取对应Task的Location Preference,用来进行调度决策 @transient private val preferredLocs: Seq[TaskLocation] = { if (locs == null) Nil else locs.toSet.toSeq } - 提交所有的Task
if (tasks.size > 0) { // 提交task taskScheduler.submitTasks(new TaskSet( tasks.toArray, stage.id, stage.latestInfo.attemptNumber, jobId, properties)) }
下面的代码显示了getPreferredLocsInternal()方法的细节,即获取一个RDD中某一个Partition的Location信息,返回对应的TaskLocation接口的某个实现类:
-------------------------------------- DAGScheduler --------------------------------------
private def getPreferredLocsInternal(
rdd: RDD[_], // 当前Stage的RDD
partition: Int, // 这个Partitoin的index,即在rdd.partitions中的index
visited: HashSet[(RDD[_], Int)]): Seq[TaskLocation] = {
// If the partition has already been visited, no need to re-visit.
// This avoids exponential path exploration. SPARK-695
if (!visited.add((rdd, partition))) {
// Nil has already been returned for previously visited partitions.
return Nil
}
// 如果这个partition已经缓存,那么就返回缓存以后的Partion的Location信息
val cached = getCacheLocs(rdd)(partition)
if (cached.nonEmpty) {
return cached
}
// 如果这个RDD含有一个Location Preference,那么就返回这个Location Preference
val rddPrefs = rdd.preferredLocations(rdd.partitions(partition)).toList
if (rddPrefs.nonEmpty) {
return rddPrefs.map(TaskLocation(_)) // 这里会根据getPreferredLocations()的返回值的List,将List中的每一个值映射到一个TaskLocation的实现类
}
TaskLocation的apply()方法会根据传入的参数的类型,返回其对应的不同实现类:
---------------------------------- TaskLocation ------------------------------------
/**
* Create a TaskLocation from a string returned by getPreferredLocations.
* These strings have the form executor_[hostname]_[executorid], [hostname], or
* hdfs_cache_[hostname], depending on whether the location is cached.
*/
def apply(str: String): TaskLocation = {
val hstr = str.stripPrefix(inMemoryLocationTag)
if (hstr.equals(str)) {
if (str.startsWith(executorLocationTag)) {
val hostAndExecutorId = str.stripPrefix(executorLocationTag)
val splits = hostAndExecutorId.split("_", 2)
val Array(host, executorId) = splits
new ExecutorCacheTaskLocation(host, executorId)
} else {
new HostTaskLocation(str)
}
} else {
new HDFSCacheTaskLocation(hstr)
}
}
}
可以看到,rdd.partitions(partition)方法根据这个partition index,返回了这个Partition对象。对于NewHadoopRDD,这个Partition的实现是NewHadoopPartition。一个NewHadoopPartition对象中存放了对应的InputSplit接口的实现类。比如,对于一个文件,InputSplit的实现是FileSplit,而InputSplit则包含了对应的Location信息:
然后,调用对应的RDD的getPreferredLocations()方法获取Location Preference,即一个NewHadoopRDD中包含了所有的Partition,每一个Partition由一个Partition接口的实现类NewHadoopPartition对象表示,每个NewHadoopPartition中存放了这个Partition的InputSplit信息:
----------------------------------- NewHadoopRDD ---------------------------------------
override def getPreferredLocations(hsplit: Partition): Seq[String] = {
// 返回这个 NewHadoopPartition对应的Hadoop层面的Split信息,比如,一个文件的FileSplit,
// 包含了这个File中这个split的起始位置,长度,replica的位置
val split = hsplit.asInstanceOf[NewHadoopPartition].serializableHadoopSplit.value
// 提取这个FileSplit的多个Replica位置信息
val locs = HadoopRDD.convertSplitLocationInfo(split.getLocationInfo)
locs.getOrElse(split.getLocations.filter(_ != "localhost"))
}
在Spark端,在生成每一个RDD中的Partition的信息的时候,其映射关系其实从底向上为 HDFS Split(InputSplit) -> Partition(NewHadoopPartition) -> Task 的关系,因此,在生成RDD Partition的时候,会将对应的Split的Location信息转换成Partition的Location信息,这个Partition的Location信息使用TaskLocation对象的具体实现类来表达的。这个转换是由方法convertSplitLocationInfo()负责的,即:
- 如果Split的是内存缓存,则构造HDFSCacheTaskLocation的location对象,代表这个partition已经被HDFS的对应Host缓存了。很显然,对应的Task如果直接调度到这台机器,则会提高读取效率;
- 如果Split不是内存缓存,则构造HostTaskLocation,显然,Task调度到这条机器上,读取效率会更高(没有跨机器的网络带宽,如果打开了短路读,还可以利用HDFS的短路读特性)
---------------------------------- HadoopRDD --------------------------------------- private[spark] def convertSplitLocationInfo( infos: Array[SplitLocationInfo]): Option[Seq[String]] = { Option(infos).map(_.flatMap { loc => val locationStr = loc.getLocation if (loc.isInMemory) { Some(HDFSCacheTaskLocation(locationStr).toString) } else { Some(HostTaskLocation(locationStr).toString) } }) }
TaskLocation的实现类除了HDFSCacheTaskLocation和HostTaskLocation,还有ExecutorCacheTaskLocation,即这个Task希望运行在这个Executor上,比如,下面两种情况,这个Partition的Locality Preference是希望精确到对应的Executor的:
- 在Streaming的Task的调度中,对于Receiver的调度,为了均匀调度,会首先将所有的Task均匀调度到Host上,剩下的Executor均匀调度到Executor上。这不不在赘述,详细逻辑可以查看ReceiverSchedulingPolicy的scheduleReceivers()方法;
- 这个Partition在这个Executor上被缓存,因此,对应的Task肯定需要精确运行在对应的Executor上。这不不在赘述,详细逻辑可以查看DAGScheduler的getCacheLocs()方法。
对应的TaskLocation接口的实现类的toString()方法就返回了这个TaskLocation的String表示。比如,HostTaskLocation.toString()就返回对应的Hostname:
----------------------------------------- HostTaskLocation ----------------------------------
/**
* A location on a host.
*/
private [spark] case class HostTaskLocation(override val host: String) extends TaskLocation {
override def toString: String = host
}
-------------------------------------- HDFSCacheTaskLocation ----------------------------------
/**
* A location on a host that is cached by HDFS.
*/
private [spark] case class HDFSCacheTaskLocation(override val host: String) extends TaskLocation {
override def toString: String = TaskLocation.inMemoryLocationTag + host
}
这样,DAGScheduler.submitMissingTasks()就会提交这些带有Location Preference的Task。这些Task会在Driver端经过一些统计计算,让ApplicationMaster根据提供的资源量、Task的位置倾向等,向Yarn申请资源,申请到的资源向Driver注册,Driver再将Task和Container进行最有匹配,最大程度满足Task的位置需求。
根据TaskLocation信息,将Task添加到不同的pendingTask数组中
所有需要运行因此需要相应资源的Task,Driver都会将对应的Task添加到pendingTask中,这些pendingTask是由TaskSetManager维护的,一个TaskSetManager对象是一个stage的任务集合,主要负责这个Stage的Task的管理和调度。
根据每一个Task的资源本地性需求的不同,pendingTask分别维护在下面的Map中,代码如下:
// 希望在某一个Executor上运行的pendingTasks,Key是Executor ID,Value是希望在这个Executor上运行的TaskID的列表
private val pendingTasksForExecutor = new HashMap[String, ArrayBuffer[Int]]
// 希望在某一个Host上运行的pendingTasks,Key是对应的Host,Value是希望在这个Host上运行的TaskID的列表
private val pendingTasksForHost = new HashMap[String, ArrayBuffer[Int]]
// 希望在某个一Rack上运行的pendingTasks,Key是对应的Rack,Value是希望在这个Rack上运行的TaskID的列表
private val pendingTasksForRack = new HashMap[String, ArrayBuffer[Int]]
// 没有任何的本地性需求的pendingTasks的列表
private[scheduler] var pendingTasksWithNoPrefs = new ArrayBuffer[Int]
向PendingTask中添加任务的时候,会根据每一个task的本地性需求,将对应的pendingTask放入到上面不同的任务集合中,
/** Add a task to all the pending-task lists that it should be on. */
private[spark] def addPendingTask(index: Int) {
for (loc <- tasks(index).preferredLocations) {
loc match {
case e: ExecutorCacheTaskLocation =>
pendingTasksForExecutor.getOrElseUpdate(e.executorId, new ArrayBuffer) += index
case e: HDFSCacheTaskLocation =>
val exe = sched.getExecutorsAliveOnHost(loc.host)
exe match {
case Some(set) =>
for (e <- set) {
pendingTasksForExecutor.getOrElseUpdate(e, new ArrayBuffer) += index
}
}
case _ =>
}
pendingTasksForHost.getOrElseUpdate(loc.host, new ArrayBuffer) += index
for (rack <- sched.getRackForHost(loc.host)) {
pendingTasksForRack.getOrElseUpdate(rack, new ArrayBuffer) += index
}
}
if (tasks(index).preferredLocations == Nil) {
pendingTasksWithNoPrefs += index
}
allPendingTasks += index // No point scanning this whole list to find the old task there
}
其基本逻辑为:
-
遍历所有的Task,根据对应Task的location preference,将对应的Task添加到对应的pendingLocation数组中:
-
如果是ExecutorCacheTaskLocation,那么就将Task添加到pendingTasksForExecutor中
case e: ExecutorCacheTaskLocation => pendingTasksForExecutor.getOrElseUpdate(e.executorId, new ArrayBuffer) += index -
如果是HDFSCacheTaskLocation,并且这个Host上的确有active的Executor,那么就将这个task添加到这个Host上的每一个Executor上,即将这个Task添加到pendingTasksForExecutor中。但是,显然,这个Task最终只会在其中的某个Executor上运行一次,而不会重复运行。
val exe = sched.getExecutorsAliveOnHost(loc.host) exe match { case Some(set) => for (e <- set) { pendingTasksForExecutor.getOrElseUpdate(e, new ArrayBuffer) += index } -
无论是ExecutorCacheTaskLocation,还是HDFSCacheTaskLocation,都将这个Task添加到pendingTasksForHost中,因为这个Task肯定会运行着这个Host上的。
pendingTasksForHost.getOrElseUpdate(loc.host, new ArrayBuffer) += index -
获取这个Host所在的Rack,然后添加到这个对应的pendingTasksForRack中:
for (rack <- sched.getRackForHost(loc.host)) { pendingTasksForRack.getOrElseUpdate(rack, new ArrayBuffer) += index } -
如果这个Task没有任何location preference,那么就添加到pendingTasksWithNoPrefs中:
if (tasks(index).preferredLocations == Nil) { pendingTasksWithNoPrefs += index } -
无论怎样,将这个task添加到allPendingTasks中,这是当所有的locality都无法满足要求一户最坏的Locality选择。
总之,我们需要注意:
- 区分pendingTasksWithNoPrefs和allPendingTasks。前者意味着Task本身对locality没有任何要求,因此可以随意将Task进行分配。而allPendingTasks中存放了所有的task,意味着当我们无法满足task的localtiy要求以后的不得已的选择。比如一个在pendingTasksForRack中的task的locality要求无法满足,只能退化到选择其他Rack来运行该Task
- pendingTasksForExecutor、pendingTasksForHost、pendingTasksForRack之间存在的包含关系,即,如果一个Task是pendingTasksForExecutor,那么也会放入到这个Executor所在的host(pendingTasksForHost)和所在的rack(pendingTasksForRack)中,同理,如果一个Task的pendingTasksForHost,也会放入到这个Host所在的Rack(pendingTasksForRack)中。而且,所有的Task都会放入到allPendingTasks中。我们从后面的locality退化可以看到原因,即如果某个locality要求下无法分配完所有的task,那么会退化到低一级的优先级,而低一级的优先级列表中肯定包含了高一级优先级列表的Task,因此这个Task可以在低一级进行调度。
- 我们可以看到,pendingTasksForRack中的task并不是这个task的locality preference直接就是就是这个rack,而是这个task的locatiion是对应的某个host,因此将这个host所在的rack添加为这个task的rack locality。后面会看到,rack locality是比no preference更低一级的locality,其实就是这个原因,尽管表面上看起来比较疑惑,也与比如Yarn的任务调度逻辑似乎不同。
可用的LocationLevel的计算
Spark用一个枚举类型TaskLocality来表达不同的本地级别:
object TaskLocality extends Enumeration {
// Process local is expected to be used ONLY within TaskSetManager for now.
val PROCESS_LOCAL, NODE_LOCAL, NO_PREF, RACK_LOCAL, ANY = Value
PROCESS_LOCAL: 进程本地,即这个Task希望调度到某一个特定的Executor上
NODE_LOCAL: 节点本地,即这个Task希望调度到某一个特定的节点
NO_PREF: 没有本地倾向,即这个Task可以任意调度到集群中的任何节点
RACK_LOCAL: 机架本地,即这个Task希望调度到某一个特定的rack上
ANY: 无法满足要求,是前面四种本地性倾向都无法满足要求时的最后的选择策略,将有节点倾向的Task任意调度到集群中无法满足其本地性倾向的位置上。
这里需要注意的是:
- 显然,越靠前,数字越小,Locality级别越高
- RACK_LOCAL并不指的是这些任务的locality preference中本来就指明了运行在这个Rack上,而是NODE_LOCAL或者PROCESS_LOCAL的对应退化调度策略,即,如果对应的节点或者Executor由于资源问题无法满足其要求,就会退化到使用RACK_LOCAL,并不是Task本身声明调度到rack上。
- NO_PREF的优先级比RACK_LOCAL的优先级更高,这是因为NO_PREF指的是Task本身明确表明自己没有本地性偏好,因此不是一种退化策略,而是对其locality的一种完全的满足,而RACK_LOCAL其实是一种退化策略,因此RACK_LOCAL的优先级低于NO_PREF
- ANY的优先级最低,和RACK_LOCAL一样,也是一种退化策略。
在一个TaskSet的TaskSetManager构造的时候,以及后来一个新的Executor加入或者丢失的时候,都会重新计算这个TaskSet的Valid Locality Levels。所以,应该注意到:
- Valid Locality Levels 指的是根据当前的Pending Task的不同LOCALITY需求(比如,不同locality需求的pending task分别放在了pendingTasksForExecutor、pendingTasksForHost、pendingTasksWithNoPrefs、pendingTasksForRack和allTasks中),计算我们目前可能需要的是哪些TaskLocality。这样,在对Task进行基于Locality 的分配(下文会讲到)的时候,只需要考虑这些valid locality levels。
- 必须注意,computeValidLocalityLevels是TaskSetManager的成员方法,即这里是为某一个TaskSet计算对应的Valid Locality Levels
下面的方法显示了计算valid locality level的基本过程:
------------------------------------- TaskSetManager --------------------------------------
private def computeValidLocalityLevels(): Array[TaskLocality.TaskLocality] = {
import TaskLocality.{PROCESS_LOCAL, NODE_LOCAL, NO_PREF, RACK_LOCAL, ANY}
val levels = new ArrayBuffer[TaskLocality.TaskLocality]
// 如果有任务在等待执行器(executor),并且这些执行器中有活着的执行器,那么就将PROCESS_LOCAL添加到有效级别列表中。
if (!pendingTasksForExecutor.isEmpty &&
pendingTasksForExecutor.keySet.exists(sched.isExecutorAlive(_))) {
levels += PROCESS_LOCAL
}
// 如果有任务在等待主机(host),并且这些主机上有活着的执行器,那么就将NODE_LOCAL添加到有效级别列表中。
if (!pendingTasksForHost.isEmpty &&
pendingTasksForHost.keySet.exists(sched.hasExecutorsAliveOnHost(_))) {
levels += NODE_LOCAL
}
if (!pendingTasksWithNoPrefs.isEmpty) {
levels += NO_PREF
}
// 如果有任务在等待机架(rack),并且这些机架上有活着的主机,那么就将RACK_LOCAL添加到有效级别列表中。
if (!pendingTasksForRack.isEmpty &&
pendingTasksForRack.keySet.exists(sched.hasHostAliveOnRack(_))) {
levels += RACK_LOCAL
}
levels += ANY
levels.toArray
}
该方法返回一个TaskLocality数组,即如果对应的pendingTask数组中有Task,那么就讲对应的TaskLocality添加到数组中。这里需要注意到往数组中添加TaskLocality是按照TaskLocality的值从低到高(Locality优先级从高到低)的顺序添加的,从下文介绍基于Locality的Task调度可以看到,调度时会遍历这个返回的TaskLocality数组,即调度时按照Locality优先级从高到低进行的。最后的TaskLocality.ANY一定会最后添加到结果中,作为一个优先级的保底操作。
基于Locality的Task调度
上文讲过,Task的调度的触发,以及其通过makeOffers()方法进行调度。在这里,我们详细讲解这个调度的基本细节。
makeOffers()的基本功能,就是为当前的Executor的资源剩余情况,生成对应的WorkerOffer,代表这些Executor可提供的运行资源,其中包含了对应的executorId,所在的host信息以及可用的vCore信息:
private[spark]
case class WorkerOffer(executorId: String, host: String, cores: Int)
然后TaskScheduler会根据这些剩余资源,将对应的pendingTask调度出去,当然,调度过程中需要依赖对应的Task的locality信息。
private def makeOffers() {
// 根据集群当前的可用资源状况,生成Task的调度结果
val taskDescs = CoarseGrainedSchedulerBackend.this.synchronized {
// Filter out executors under killing
val activeExecutors = executorDataMap.filterKeys(executorIsAlive)
val workOffers = activeExecutors.map {
case (id, executorData) =>
new WorkerOffer(id, executorData.executorHost, executorData.freeCores)
}.toIndexedSeq // 构造每一个Executor上的可用资源
scheduler.resourceOffers(workOffers) // 在这里依赖于TaskScheduler来调度对应的task到对应的worker上
}
launchTasks(taskDescs) // 启动这些tasks
}
resourceOffers()方法是TaskSchedulerImpl的成员方法,其输入是一系列的WorkerOffer,返回可以进行调度的所有Task(每一个Task由一个TaskDescription表示)。我们后面会看到,TaskSchedulerImpl会遍历当前需要调度的所有TaskSet尝试进行调度,而不是某一个TaskSet。
resourceOffers()代码如下所示:
def resourceOffers(offers: IndexedSeq[WorkerOffer]): Seq[Seq[TaskDescription]] = synchronized {
// Mark each slave as alive and remember its hostname
// Also track if new executor is added
var newExecAvail = false
for (o <- offers) { // 对于每一个WorkerOffer
if (!hostToExecutors.contains(o.host)) {
hostToExecutors(o.host) = new HashSet[String]() // 构建这个Host的Executor的map
}
// 是否有新增的executor进来。如果有,则维护executor相关的map信息
if (!executorIdToRunningTaskIds.contains(o.executorId)) {
hostToExecutors(o.host) += o.executorId // 将这个executor加到这个host -> executors 的map中
executorAdded(o.executorId, o.host)
executorIdToHost(o.executorId) = o.host // 将这个host加到executor -> host 的毛重
executorIdToRunningTaskIds(o.executorId) = HashSet[Long]() // 构建这个executor -> tasks的map
newExecAvail = true
}
for (rack <- getRackForHost(o.host)) {
hostsByRack.getOrElseUpdate(rack, new HashSet[String]()) += o.host // 构建rack -> hosts的map
}
}
// Before making any offers, remove any nodes from the blacklist whose blacklist has expired. Do
// this here to avoid a separate thread and added synchronization overhead, and also because
// updating the blacklist is only relevant when task offers are being made.
blacklistTrackerOpt.foreach(_.applyBlacklistTimeout())
val filteredOffers = blacklistTrackerOpt.map { blacklistTracker =>
offers.filter { offer =>
!blacklistTracker.isNodeBlacklisted(offer.host) &&
!blacklistTracker.isExecutorBlacklisted(offer.executorId)
}
}.getOrElse(offers)
// 将offer进行随机shuffle,返回打乱顺序以后的IndexedSeq[WorkerOffer]
val shuffledOffers = shuffleOffers(filteredOffers)
// Build a list of tasks to assign to each worker.
// 根据当前的WorkerOffer,预构建一个TaskDescription的二维数组
val tasks = shuffledOffers.map(o => new ArrayBuffer[TaskDescription](o.cores / CPUS_PER_TASK))
val availableCpus = shuffledOffers.map(o => o.cores).toArray // 构建WorkerOffer -> 可用CPU的对应关系
val sortedTaskSets = rootPool.getSortedTaskSetQueue
for (taskSet <- sortedTaskSets) {
if (newExecAvail) { // 如果有新的Executor加入进来
taskSet.executorAdded() // 重新计算这个TaskSet的locality的相关信息
}
}
// Take each TaskSet in our scheduling order, and then offer it each node in increasing order
// of locality levels so that it gets a chance to launch local tasks on all of them.
// NOTE: the preferredLocality order: PROCESS_LOCAL, NODE_LOCAL, NO_PREF, RACK_LOCAL, ANY
for (taskSet <- sortedTaskSets) { // 按照调度顺序,取出每一个TaskSet
var launchedAnyTask = false
var launchedTaskAtCurrentMaxLocality = false
// locality从低到高遍历这个TaskSet中的每一个可用的localityLevels,locality越低代表本地性越好
for (currentMaxLocality <- taskSet.myLocalityLevels) {
do {
launchedTaskAtCurrentMaxLocality = resourceOfferSingleTaskSet(
taskSet, currentMaxLocality, shuffledOffers, availableCpus, tasks)
launchedAnyTask |= launchedTaskAtCurrentMaxLocality
} while (launchedTaskAtCurrentMaxLocality)
}
if (!launchedAnyTask) { // 没有launch任何一个task
taskSet.abortIfCompletelyBlacklisted(hostToExecutors)
}
}
if (tasks.size > 0) {
hasLaunchedTask = true
}
return tasks
}
makeOffers()的基本流程如下图所示:
其基本流程为:
- 根据生成的每一个WorkerOffer,TaskScheduler会维护executor <-> host <-> rack之间的映射关系。刚刚说过,resourceOffers()调用有可能来自于Executor的注册,因此有必要根据WorkerOffer来更新这个新的Executor和Host以及Rack之间的映射关系
for (o <- offers) { // 对于每一个WorkerOffer if (!hostToExecutors.contains(o.host)) { hostToExecutors(o.host) = new HashSet[String]() // 构建这个Host的Executor的map } // 是否有新增的executor进来。如果有,则维护executor相关的map信息 if (!executorIdToRunningTaskIds.contains(o.executorId)) { hostToExecutors(o.host) += o.executorId // 将这个executor加到这个host -> executors 的map中 executorAdded(o.executorId, o.host) executorIdToHost(o.executorId) = o.host // 将这个host加到executor -> host 的毛重 executorIdToRunningTaskIds(o.executorId) = HashSet[Long]() // 构建这个executor -> tasks的map newExecAvail = true } for (rack <- getRackForHost(o.host)) { hostsByRack.getOrElseUpdate(rack, new HashSet[String]()) += o.host // 构建rack -> hosts的map } } - 过滤掉部分不考虑的WorkerOffer,比如,这个WorkerOffer的Node或者Executor在黑名单中
val filteredOffers = blacklistTrackerOpt.map { blacklistTracker => offers.filter { offer => !blacklistTracker.isNodeBlacklisted(offer.host) && !blacklistTracker.isExecutorBlacklisted(offer.executorId) } }.getOrElse(offers) - 为了避免每次都将Task调度到某一个WorkerOffer上(假如这个WorkerOffer资源足够多),每次调用resourceOffers()的时候都会对WorkerOffer进行一次重新随机排序。注意,这个重新排序只是将WorkerOffer重新排序,没有将Locality重新排序,locality永远从高到低(值从小到大)进行考虑。
// 将offer进行随机shuffle,返回打乱顺序以后的IndexedSeq[WorkerOffer]
val shuffledOffers = shuffleOffers(filteredOffers)
// Build a list of tasks to assign to each worker.
// 根据当前的WorkerOffer,预构建一个TaskDescription的二维数组
val tasks = shuffledOffers.map(o => new ArrayBuffer[TaskDescription](o.cores / CPUS_PER_TASK))
val availableCpus = shuffledOffers.map(o => o.cores).toArray // 构建WorkerOffer -> 可用CPU的对应关系
- 根据TaskSet的调度策略,获取排序以后的TaskSet列表。对于列表中的每一个TaskSet,如果这个TaskSet刚刚有新的Host加入,需要通过调用TaskSet的executorAdded()方法,这个方法主要是重新计算locality信息。上文已经介绍过TaskSet的locality信息的计算。 TaskSet的调度策略不在本文介绍范围内,感兴趣的读者可以自行了解
val sortedTaskSets = rootPool.getSortedTaskSetQueue // 根据TaskSet调度策略,返回排序以后的TaskSet数组 for (taskSet <- sortedTaskSets) { if (newExecAvail) { // 如果有新的Executor加入进来 taskSet.executorAdded() // 重新计算这个TaskSet的locality的相关信息 } } - 根据排序以后的TaskSet,遍历每一个TaskSet,基于这个TaskSet的locality数组,对这个TaskSet的task进行调度。
上文讲过locality数组的生成过程,可以看到locality数组从前到手的locality从高到低,因此,这里的逻辑是,对于每一个TaskSet,尝试先调度locality最高的Task,并且,如果当前要求的locality在指定的超时时间内无法将所有task调度完毕,将尝试更低一级的locality进行调度。到最后,locality会降低到TaskLocality.ANY,即进行任意调度。for (taskSet <- sortedTaskSets) { // 按照调度顺序,取出每一个TaskSet var launchedAnyTask = false var launchedTaskAtCurrentMaxLocality = false // locality从低到高遍历这个TaskSet中的每一个可用的localityLevels,locality越低代表本地性越好 for (currentMaxLocality <- taskSet.myLocalityLevels) { do { launchedTaskAtCurrentMaxLocality = resourceOfferSingleTaskSet( taskSet, currentMaxLocality, shuffledOffers, availableCpus, tasks) launchedAnyTask |= launchedTaskAtCurrentMaxLocality } while (launchedTaskAtCurrentMaxLocality) } if (!launchedAnyTask) { // 没有launch任何一个task taskSet.abortIfCompletelyBlacklisted(hostToExecutors) } }
所以,对于一个TaskSet中的task根据当前要求的TaskLocality进行任务调度,发生在方法resourceOfferSingleTaskSet()中。这个方法根据允许的最大的locality(currentMaxLocality, 这里的最大指的是最低要求,即,不可以比这个locality更宽松了),当前可用资源(shuffledOffers),需要调度的TaskSet,返回成功调度的这个TaskSet中的task:
private def resourceOfferSingleTaskSet(
taskSet: TaskSetManager, // 当前的TaskSet
maxLocality: TaskLocality, // 当前最大的locality,最大的意思是最优的locality
shuffledOffers: Seq[WorkerOffer], // 每一个WorkerOffer代表了一个可用资源
availableCpus: Array[Int], // 这个shuffledOffers中的每一个WorkerOffer所代表的可用的VCores
// 一个WorkerOffer按照可用cpu以及每个task的cpu,算出Task的数量
tasks: IndexedSeq[ArrayBuffer[TaskDescription]]) : Boolean = {
var launchedTask = false
// nodes and executors that are blacklisted for the entire application have already been
// filtered out by this point
for (i <- 0 until shuffledOffers.size) { // 遍历每一个WorkerOffer(每一个WorkerOffer对应了一个executor)
val execId = shuffledOffers(i).executorId
val host = shuffledOffers(i).host
for (task <- taskSet.resourceOffer(execId, host, maxLocality)) { // 往这个Offer上调度一个Task
tasks(i) += task // 保存调度结果
val tid = task.taskId
....
launchedTask = true
}
}
return launchedTask
}
从上面的代码可以看到,resourceOfferSingleTaskSet()方法会遍历当前所有的可用资源WorkerOffer,尝试按照当前的maxLocality,调用resourceOffer()方法,往这个Offer上面调度一个task。
resourceOffer()方法是TaskSet的成员方法,其根据executorID, hostname以及最大允许的locality(maxLocality, 即locality不可以再差了),尝试从pendingTask中选出一个满足条件的task调度:
def resourceOffer(
execId: String, // executor id
host: String, // executor所在的host
maxLocality: TaskLocality.TaskLocality) // 所容许的locality,不能比这个locality更宽松
: Option[TaskDescription] =
{
....
val curTime = clock.getTimeMillis()
// allowedLocality 代表当前最宽松的locality是什么,显然,在开始的时候,我们希望allowedLocality严格一点儿,
// 后面如果分配失败了,再逐渐放松要求
var allowedLocality = maxLocality
// 如果 maxLocality == TaskLocality.NO_PREF,那么allowedLocality = maxLocality,
// 进入TaskLocality.NO_PREF本来就是对调度没有任何要求
if (maxLocality != TaskLocality.NO_PREF) {
allowedLocality = getAllowedLocalityLevel(curTime) // 根据当前的时间,更新当前时间节点下的allowedLocality
if (allowedLocality > maxLocality) { // allowedLocality比maxLocality更松弛
// We're not allowed to search for farther-away tasks
allowedLocality = maxLocality
}
}
// 根据当前计算得到的locality 弹出对应的tasks,然后调度起来
dequeueTask(execId, host, allowedLocality).map { case ((index, taskLocality, speculative)) =>
// Found a task; do some bookkeeping and return a task description
.....
currentLocalityIndex = getLocalityIndex(taskLocality)
lastLaunchTime = curTime // 更新这个TaskSetManager的最后一个task的启动时间
.....
....
addRunningTask(taskId)
sched.dagScheduler.taskStarted(task, info)
new TaskDescription(.....)
}
}
可以看到,getAllowedLocalityLevel()方法根据当前传入的最大允许的locality和当前时间,计算真正的允许的locality,然后从当前的pendingTask中取出满足要求的Task返回。
- 根据传入的最大允许的locality(maxLocality),计算实际使用的allowedLocality。之所以实际使用的allowedLocality可能与maxLocality不同,原因是maxLocality代表了这个TaskSet的locality数组的外层循环(resourceOffers()方法会按照locality从第到高进行Task的分配),但是在延迟调度的场景下,在某一个locality level没有合适资源的情形下,在配置的退化时间到来之前,不急于将locality进行退化处理,即myLocalityLevels(currentLocalityIndex)不变,依然为NODE_LOCAL。在下一轮调度重新到来的时候(resourceOffers()方法重新运行),在尝试到maxLocality = ALL的时候,突然有了可以满足locality = NODE_LOCAL的资源,这时候getAllowedLocalityLevel()就会返回myLocalityLevels(currentLocalityIndex) = NODE_LOCAL,因为这个locality level的超时时间还没到,进而maxLocality更新为NODE_LOCAL,从而在最大运行的locality为NODE_LOCAL的约束下进行任务调度
- 根据当前的host, executorID和maxLocality,尝试从pendingTask的队列中取出一个符合要求的Task。这里的符合要求指的是,这个Task的locality偏好是允许在这个host+executorID上运行的,并且如果在这个host + executorID上运行,其locality是不会比maxLocality更差的。
比如:
dequeueTask的逻辑如下所示。它根据当前的WorkerOffer(Executor ID + hostname)和允许的最大的locality(maxLocaltiy),返回一个locality满足要求的Task准备运行。这里的满足要求指的是,这个Task如果运行在这个WorkerOffer上,能够满足所允许的最差的locality(maxLocality)的要求。
private def dequeueTask(execId: String, host: String, maxLocality: TaskLocality.Value)
: Option[(Int, TaskLocality.Value, Boolean)] =
{
// TaskLocality.isAllowed(maxLocality, TaskLocality.PROCESS_LOCAL) 永远返回true,因此不做判断
for (index <- dequeueTaskFromList(execId, host, getPendingTasksForExecutor(execId))) {
return Some((index, TaskLocality.PROCESS_LOCAL, false))
}
if (TaskLocality.isAllowed(maxLocality, TaskLocality.NODE_LOCAL)) {
for (index <- dequeueTaskFromList(execId, host, getPendingTasksForHost(host))) {
return Some((index, TaskLocality.NODE_LOCAL, false))
}
}
if (TaskLocality.isAllowed(maxLocality, TaskLocality.NO_PREF)) {
// Look for noPref tasks after NODE_LOCAL for minimize cross-rack traffic
for (index <- dequeueTaskFromList(execId, host, pendingTasksWithNoPrefs)) {
return Some((index, TaskLocality.PROCESS_LOCAL, false))
}
}
if (TaskLocality.isAllowed(maxLocality, TaskLocality.RACK_LOCAL)) {
for {
rack <- sched.getRackForHost(host)
index <- dequeueTaskFromList(execId, host, getPendingTasksForRack(rack))
} {
return Some((index, TaskLocality.RACK_LOCAL, false))
}
}
if (TaskLocality.isAllowed(maxLocality, TaskLocality.ANY)) {
for (index <- dequeueTaskFromList(execId, host, allPendingTasks)) {
return Some((index, TaskLocality.ANY, false))
}
}
// find a speculative task if all others tasks have been scheduled
dequeueSpeculativeTask(execId, host, maxLocality).map {
case (taskIndex, allowedLocality) => (taskIndex, allowedLocality, true)}
}
示例1:
当前的WorkerOffer信息如下:
- Hostname: testhost1.corp.com
- ExecutorID: 25536
当前的maxLocality = NODE_LOCAL, testhost1-rack1.corp.com所在的rack为rack1
在当前的TaskSet中pendingTasksForExecutor中有一个Task A,其preference正好是 Executor 25535。因此,根据上文所讲解的pendingTask的添加过程,Task A会同时存在于pendingTasksForExecutor,pendingTasksForHost,pendingTasksForRack以及allTasks中。
这时候dequeueTask()的运行过程为:
- 由于pendingTasksForExecutor中没有针对Executor 25536的Task A,因此返回Task A,Task A的实际locality是更好的PROCESS_LOCAL,满足了maxLocality = NODE_LOCAL的要求
示例2:
当前的WorkerOffer信息如下:
- Hostname: testhost1.corp.com
- ExecutorID: 25536
当前的maxLocality = NODE_LOCAL, testhost1-rack1.corp.com所在的rack为rack1
在当前的TaskSet中pendingTasksForExecutor中没有针对ExecutorID: 25536
的pending Task。但是在pendingTasksForHost中有一个Task B, 其 locality preference正好是Hostname: testhost1.corp.com。 根据上文所讲解的pendingTask的添加过程,Task B会同时存在于pendingTasksForHost,pendingTasksForRack以及allTasks中。
这时候dequeueTask()的运行过程为:
- 由于pendingTasksForExecutor中没有针对Hostname: testhost1.corp.com,因此跳过
- 由于pendingTasksForHost中有针对Hostname testhost1.corp.com的Task,因此取出并返回Task B,此时的实际locality正好等于maxLocality,为 NODE_LOCAL
示例3:
当前的WorkerOffer信息如下:
- Hostname: testhost1.corp.com
- ExecutorID: 25536
当前的maxLocality = RACK_LOCAL, testhost1-rack1.corp.com所在的rack为rack1
在当前的TaskSet中pendingTasksForExecutor中没有针对ExecutorID: 25536
的pending Task。但是在pendingTasksForHost中有一个Task B, 其 locality preference是Hostname: testhost2-rack1.corp.com,即它的locality preference同当前的WorkerOffer不在一个节点但是在一个机架上。 根据上文所讲解的pendingTask的添加过程,Task B会同时存在于pendingTasksForHost,pendingTasksForRack以及allTasks中。
这时候dequeueTask()的运行过程为:
- 由于pendingTasksForExecutor中没有针对Hostname: testhost1.corp.com,因此跳过
- 由于pendingTasksForHost中有针对Hostname testhost1.corp.com的Task,因此跳过
- 由于pendingTasksForHost中有针对rack1的Task C,因此取出并返回Task C,此时的实际locality是RACK_LOCAL
示例4:
当前的WorkerOffer信息如下:
- Hostname: testhost1.corp.com
- ExecutorID: 25536
当前的maxLocality = ANY, testhost1-rack1.corp.com所在的rack为rack1
在当前的TaskSet中pendingTasksForExecutor中没有针对ExecutorID: 25536的的pending Task。pendingTasksWithNoPrefs也没有Task。但是在pendingTasksForHost中有一个Task D, 其 locality preference是另外一个Hostname: testhost2-rack2.corp.com(这个testhost2所在的rack为rack2)。 根据上文所讲解的pendingTask的添加过程,Task D会同时存在于pendingTasksForHost,pendingTasksForRack以及allTasks中。
这时候dequeueTask()的运行过程为: - 由于pendingTasksForExecutor中没有针对ExecutorID: 25536,因此跳过
- 由于pendingTasksForHost中没有针对Hostname testhost2.corp.com的Task,因此跳过
- 由于pendingTasksWithNoPrefs中没有任何Task,因此跳过
- 由于getPendingTasksForRack中没有针对rack1的任何task,因此跳过
- 在allPendingTasks中取出Task D,满足maxLocality = NODE_LOCAL 要求,因此取出并返回Task D,此时实际的locality正好等于maxLocality,为ANY。
结语
Spark在Yarn上的资源管理是粗粒度的资源管理(Coarse Grained),即资源和Task并不一一对应。ApplicationMaster作为资源请求的代理,充当了细粒度的Task和粗粒度的Yarn Container之间的桥梁,即,根据细粒度的、全量的Task资源需求状态不断生成增量的、粗粒度的资源请求,并将Yarn不断异步返回的资源和当前的Task进行匹配,以最优化Task的放置。
本文全面地讲解了整个资源请求和调度过程。读者从中可以看到基于Yarn的整个资源调度过程,Spark的不同角色之间的通信过程,整个过程虽然是以Yarn为基础,但是其反映的是一个通用的资源调度决策的基本思路,因此很有参考意义。
我觉得,感兴趣的读者,可以和Spark on K8S这种细粒度的资源调度过程作比较,将会有更多的收益。
原文地址:https://blog.csdn.net/zhanyuanlin/article/details/139204816
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!