SPI总线通讯协议
SPI
SPI:串行外围设备接口(Serial peripheral interface),一种高速, 全双工、同步的通信总线。
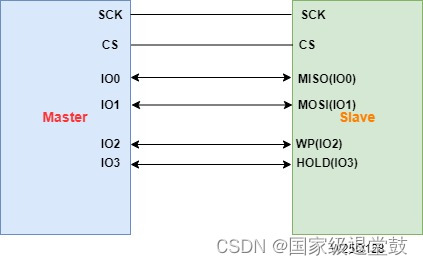
SPI使用4条线通信:
MISO:主设备数据输入,从设备数据输出,从设备发送数据。
MOSI:主设备数据输出,从设备数据输入,主设备发送数据。
SCLK:时钟信号,由主设备产生,用于同步数据传输。
CS:从设备片选信号,由主设备控制,选择需要通信的从设备。

时钟频率:
Nor Flash W25Q128JV:133MHZ
EEPROM 25AA02E48L:10MHZ
外设的读操作和写操作是同步完成的。
主设备和从设备都有一个串行移位寄存器,主设备写入一个字节到串行寄存器来发起一次传输,串行移位寄存器通过MOSI信号线将字节传送给从机,从机也将自己的串行移位寄存器中的内容通过MISO信号线返回给主机。这样,两个移位寄存器中的内容就被交换。

若只进行写操作,主机需要忽略接收到的字节。
若只进行读操作,主机必须发送一个空字节来引发从机的传输。
有三种连接模式:单主单从模式、单主多从模式、菊花链模式。
SPI时钟的相位和极性的不同组合
一共有4种不同的触发传输方式
CPOL控制电平状态。为1时,空闲状态为高电平;为0时,空闲状态为低电平。
CPHA控制相位。
为1时,第二个边沿触发。CPOL为1时,上升沿触发;CPOL为0时,下降沿触发。
为0时,第一个边沿触发。CPOL为1时,下降沿触发;CPOL为0时,上升沿触发。


QSPI

CS下降沿是能后,一般等SCLK一个时钟周期,等待其时钟上升沿时。
1、发送命令状态,用来发送8-bit的命令码。用来确定使用单线、双线、四线模式。
2、发送24位地址,由于四线同时进行,因此缩短为6个时钟周期。
3、M0~M7 位的作用是配置 QSPI 的工作模式,包括数据传输方向、时钟参数、数据位宽和速率等。
4、Dummy 周期通常用于确保数据传输的稳定性和正确性,为了调整时序而插入的虚拟字节或周期。
5、发送或接收数据,四线制,一个周期能够接收4位数据,效率提升4倍。
下面以STM32F407和外部flash(W25Q128)SPI通信传输数据为例
SPI配置
//以下是SPI模块的初始化代码,配置成主机模式
//SPI口初始化
//这里针是对SPI1的初始化
void SPI1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);//使能GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);//使能SPI1时钟
//GPIOFB3,4,5初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5;//PB3~5复用功能输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化
GPIO_PinAFConfig(GPIOB,GPIO_PinSource3,GPIO_AF_SPI1); //PB3复用为 SPI1
GPIO_PinAFConfig(GPIOB,GPIO_PinSource4,GPIO_AF_SPI1); //PB4复用为 SPI1
GPIO_PinAFConfig(GPIOB,GPIO_PinSource5,GPIO_AF_SPI1); //PB5复用为 SPI1
//这里只针对SPI口初始化
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,ENABLE);//复位SPI1
RCC_APB2PeriphResetCmd(RCC_APB2Periph_SPI1,DISABLE);//停止复位SPI1
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;//设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;//设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;//串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;//串行同步时钟的第二个跳变沿(上升或下降)数据被采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;//NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
//SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;//定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;//指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7;//CRC值计算的多项式
SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_Cmd(SPI1, ENABLE); //使能SPI外设
SPI1_ReadWriteByte(0xff);//启动传输
}
SPI读写一个字节
//SPI1 读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
u8 SPI1_ReadWriteByte(u8 TxData)
{
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET){}//等待发送区空
SPI_I2S_SendData(SPI1, TxData); //通过外设SPIx发送一个byte 数据
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET){} //等待接收完一个byte
return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据
}
W25Q128初始化
//4Kbytes为一个Sector
//16个扇区为1个Block
//W25Q128
//容量为16M字节,共有256个Block,4096个Sector
//初始化SPI FLASH的IO口
void W25QXX_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);//使能GPIOB时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOG, ENABLE);//使能GPIOG时钟
//GPIOB14
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;//PB14 片选引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//输出
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;//PG7
GPIO_Init(GPIOG, &GPIO_InitStructure);//初始化
GPIO_SetBits(GPIOG,GPIO_Pin_7);//PG7输出1,防止NRF干扰SPI FLASH的通信 SPI上还挂载着NRF 不止flash一个设备
W25QXX_CS=1;//SPI FLASH不选中
SPI1_Init(); //初始化SPI
//SPI1_SetSpeed(SPI_BaudRatePrescaler_4);//设置为21M时钟
//SPI1速度设置函数
//SPI速度=fAPB2/分频系数
//@ref SPI_BaudRate_Prescaler:SPI_BaudRatePrescaler_2~SPI_BaudRatePrescaler_256
//fAPB2时钟一般为84Mhz:
//void SPI1_SetSpeed(u8 SPI_BaudRatePrescaler)
//{
//assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler_4));//判断有效性
SPI1->CR1&=0XFFC7;//位3-5清零,用来设置波特率
SPI1->CR1|=SPI_BaudRatePrescaler_4;//设置SPI1速度
SPI_Cmd(SPI1,ENABLE); //使能SPI1
//}
W25QXX_TYPE=W25QXX_ReadID();//读取FLASH ID.
}
读取SPI FLASH
//在指定地址开始读取指定长度的数据
//pBuffer:数据存储区
//ReadAddr:开始读取的地址(24bit)
//NumByteToRead:要读取的字节数(最大65535)
void W25QXX_Read(u8* pBuffer,u32 ReadAddr,u16 NumByteToRead)
{
u16 i;
W25QXX_CS=0; //使能器件
SPI1_ReadWriteByte(W25X_ReadData); //发送读取命令 芯片手册有指令
SPI1_ReadWriteByte((u8)((ReadAddr)>>16)); // 第一次是高八位 发送24bit地址 16M字节编址的地址为24位即可
SPI1_ReadWriteByte((u8)((ReadAddr)>>8)); //u8强制类型转换后取中八位
SPI1_ReadWriteByte((u8)ReadAddr); //低八位地址
for(i=0;i<NumByteToRead;i++)
{
pBuffer[i]=SPI1_ReadWriteByte(0XFF); //循环读数 SPI发送0xFF 并接收外设的数据
}
W25QXX_CS=1;
}
写SPI FLASH
//在指定地址开始写入指定长度的数据
//该函数带擦除操作!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
u8 W25QXX_BUFFER[4096];
void W25QXX_Write(u8* pBuffer,u32 WriteAddr,u16 NumByteToWrite)
{
u32 secpos;
u16 secoff;
u16 secremain;
u16 i;
u8 * W25QXX_BUF;
W25QXX_BUF=W25QXX_BUFFER;
secpos=WriteAddr/4096;//扇区地址 找到是哪一个扇区 扇区数=256块*16个扇区
secoff=WriteAddr%4096;//在扇区内的偏移 每个扇区4096个地址 求余数找到偏移量
secremain=4096-secoff;//扇区剩余空间大小
//printf("ad:%X,nb:%X\r\n",WriteAddr,NumByteToWrite);//测试用
if(NumByteToWrite<=secremain)secremain=NumByteToWrite;//若写入的字节数比扇区剩余空间小 则赋值
while(1)
{
W25QXX_Read(W25QXX_BUF,secpos*4096,4096);//事先读出整个扇区的内容保存到W25QXX_BUF中
//编程即写数据,由于Flash的特性,只能从1编程0,所以写数据之前Flash里面的数据不是0xFF就必须先擦除,然后才能写数据。
//擦除即将Flash里面的数据恢复为0xFF的过程。
for(i=0;i<secremain;i++)//校验数据 在读出的扇区的数组(复制的那一份)W25QXX_BUF校验是否有数据
{
if(W25QXX_BUF[secoff+i]!=0XFF)break;//若数据不是默认0xFF(全为1)则证明有数据,需要擦除
}
if(i<secremain)//需要擦除
{
W25QXX_Erase_Sector(secpos);//擦除这个扇区
for(i=0;i<secremain;i++) //复制
{
W25QXX_BUF[i+secoff]=pBuffer[i];
}
W25QXX_Write_NoCheck(W25QXX_BUF,secpos*4096,4096);//写入整个扇区
}
//不需要擦除
else W25QXX_Write_NoCheck(pBuffer,WriteAddr,secremain);//写已经擦除了的,直接写入扇区剩余区间.
if(NumByteToWrite==secremain)break;//写入结束了(跨扇区)
else//写入未结束
{
secpos++;//扇区地址增1
secoff=0;//偏移位置为0
pBuffer+=secremain; //指针偏移
WriteAddr+=secremain;//写地址偏移
NumByteToWrite-=secremain;//字节数递减
if(NumByteToWrite>4096)secremain=4096;//下一个扇区还是写不完
else secremain=NumByteToWrite;//下一个扇区可以写完了
}
}
}
原文地址:https://blog.csdn.net/qq_45009309/article/details/137915640
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!