【ROS2笔记七】ROS中的参数通信
7.ROS中的参数通信
ROS2中的参数是由键值对组成的,参数可以实现动态调整。
7.1使用CLI工具调整参数
启动turtlesim功能包的环境
ros2 run turtlesim turtlesim_node
- 查看当前节点下的参数
ros2 param list
Output:
/turtlesim:
background_b
background_g
background_r
qos_overrides./parameter_events.publisher.depth
qos_overrides./parameter_events.publisher.durability
qos_overrides./parameter_events.publisher.history
qos_overrides./parameter_events.publisher.reliability
use_sim_time
- 可以详细查看每一个参数的含义
ros2 param describe <node_name> <param_name>
ros2 param describe /turtlesim background_r
Output:
Parameter name: background_r
Type: integer
Description: Red channel of the background color
Constraints:
Min value: 0
Max value: 255
Step: 1
- 查看每个参数的值
ros2 param get <node_name> <param_name>
ros2 param get /turtlesim background_r
Output:
Integer value is: 69
- 设置参数的值
ros2 param set <node_name> <param_name> <value>
ros2 param set /turtlesim background_r 10
Output:
Set parameter successful
- 存储当前的所有参数
ros2 param dump <node_name>
会保存一个<node_name>.yaml文件到当前终端的路径中,然后我们载入这个文件就能够加载所有的参数了。
- 加载参数文件
ros2 param load <node_name> <param_path>
7.2参数通信之rclcpp实现
7.2.1创建节点
ROS2中的日志类型分为5个等级,分别是
RCLCPP_DEBUG(this->get_logger(), "This is DEBUG info!");
RCLCPP_INFO(this->get_logger(), "This is INFO info!");
RCLCPP_WARN(this->get_logger(), "This is WARN info!");
RCLCPP_ERROR(this->get_logger(), "This is ERROR info!");
RCLCPP_FATAL(this->get_logger(), "This is FATAL info!");
我们可以对日志的级别进行过滤,从而查看我们想看的信息
this->get_logger().set_level(log_level);
我们可以通过参数通信来控制查看日志的等级,从而实现日志消息的过滤。
首先创建一个功能包和测试节点,
ros2 pkg create example_service_rclcpp --build-type ament_cmake --dependencies rclcpp --license Apache-2.0
parameters_basic.cpp
#include "rclcpp/rclcpp.hpp"
class ParametersBasicNode: public rclcpp::Node{
public:
ParametersBasicNode(std::string name): Node(name){
// 启动节点
RCLCPP_INFO(this->get_logger(), "Node: %s has been launched", name.c_str());
}
private:
};
int main(int argc, char * argv[]){
// 初始化rclcpp
rclcpp::init(argc, argv);
// 创建节点
auto node = std::make_shared<ParametersBasicNode>("parameters_basic");
// 关闭节点
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
CMakeLists.txt
add_executable(parameters_basic src/parameters_basic.cpp)
ament_target_dependencies(parameters_basic rclcpp)
install(TARGETS
parameters_basic
DESTINATION lib/${PROJECT_NAME}
)
7.2.2rclcpp参数API
相关的API可以参考:rclcpp: rclcpp: ROS Client Library for C++ (ros2.org)
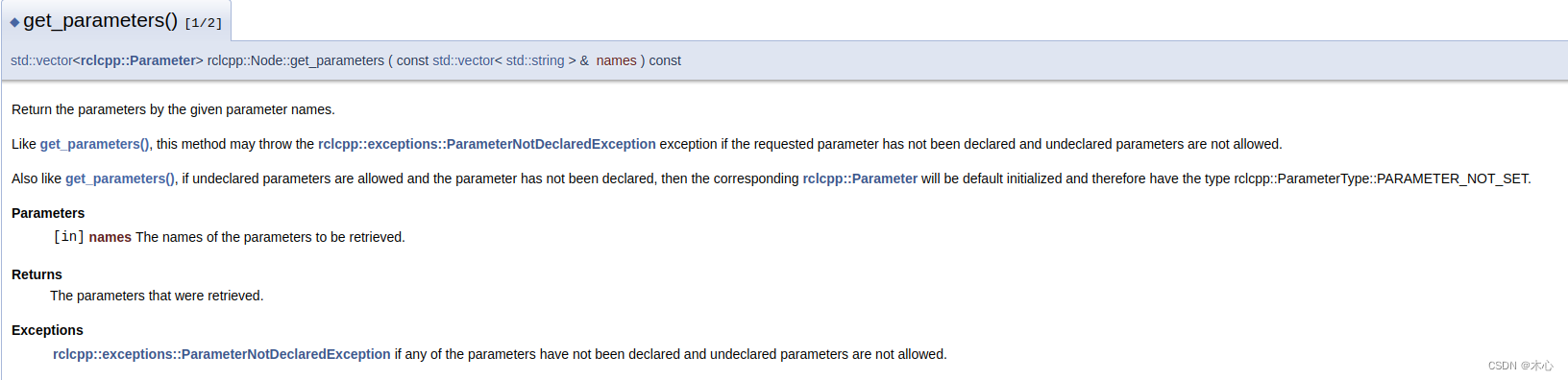
使用参数来控制日志的级别,完整程序
parameters_basic.cpp
#include "rclcpp/rclcpp.hpp"
/*
# declare_parameter 声明和初始化一个参数
# describe_parameter(name) 通过参数名字获取参数的描述
# get_parameter 通过参数名字获取一个参数
# set_parameter 设置参数的值
*/
class ParametersBasicNode: public rclcpp::Node{
public:
ParametersBasicNode(std::string name): Node(name){
// 启动节点
RCLCPP_INFO(this->get_logger(), "Node: %s has been launched", name.c_str());
this->declare_parameter("rcl_log_level", 0);
this->get_parameter("rcl_log_level", log_level);
this->get_logger().set_level((rclcpp::Logger::Level)log_level);
using namespace std::literals::chrono_literals;
timer_ = this->create_wall_timer(
500ms, std::bind(&ParametersBasicNode::timer_callback, this));
}
private:
int log_level;
rclcpp::TimerBase::SharedPtr timer_;
void timer_callback(){
this->get_parameter("rcl_log_level", log_level);
this->get_logger().set_level(rclcpp::Logger::Level(log_level));
std::cout << "=========================================" << std::endl;
RCLCPP_DEBUG(this->get_logger(), "This is DEBUG!");
RCLCPP_INFO(this->get_logger(), "This is INFO!");
RCLCPP_WARN(this->get_logger(), "This is WARN!");
RCLCPP_ERROR(this->get_logger(), "This is ERROR!");
RCLCPP_FATAL(this->get_logger(), "This is FATAL!");
std::cout << "=========================================" << std::endl;
}
};
int main(int argc, char * argv[]){
// 初始化rclcpp
rclcpp::init(argc, argv);
// 创建节点
auto node = std::make_shared<ParametersBasicNode>("parameters_basic");
// 关闭节点
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
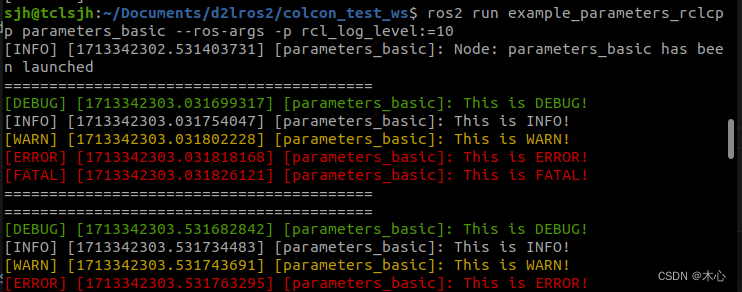
source ./install/setup.bash
ros2 run example_parameters_rclcpp parameters_basic --ros-args -p rcl_log_level:=10
运行效果如下:
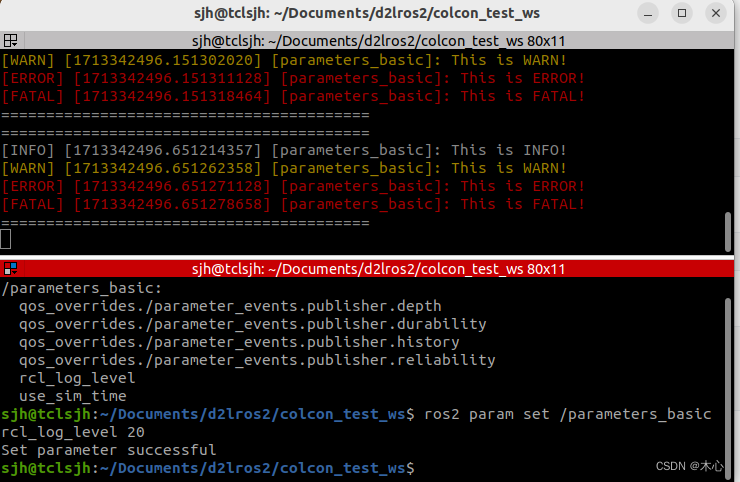
也可以动态设置参数
ros2 param list
ros2 param set /parameters_basic rcl_log_level 20
如下:
Reference
[1]d2lros2
[2]ROS2 Tutorial Official
原文地址:https://blog.csdn.net/qq_44940689/article/details/137878309
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!