KDTree索引(K近邻搜索,半径R内近邻搜索)——PCL
K近邻搜索(K Nearest Neighbors)
- K近邻搜索是一种基于点数量的搜索方法,它会找到指定点附近最接近的K个邻居点。
- K近邻搜索中的K值是一个参数,您需要指定要搜索的邻居数量。
- 该方法适用于需要查找固定数量邻居点的情况,例如K最近邻分类器和最近邻插值等。
/// <summary>
/// kdtree的k近邻索引
/// </summary>
/// <param name="cloud">需要所有的点云</param>
/// <param name="searchPoint">需要索引的点</param>
/// <param name="k">索引的个数</param>
/// <returns>返回索引出点的编号数组</returns>
std::vector<int> PclTool::kdtreeKSearch(const pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, const pcl::PointXYZ searchPoint, const unsigned int k)
{
// 创建KdTreeFLANN对象,并把创建的点云设置为输入,searchPoint变量作为查询点
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;
// 设置搜索空间
kdtree.setInputCloud(cloud);
std::vector<int> pointIdxNKNSearch(k); // 存储查询点近邻索引
std::vector<float> pointNKNSquaredDistance(k); // 存储近邻点对应距离平方
// 打印相关信息
std::cout << "K nearest neighbor search at (" << searchPoint.x << " " << searchPoint.y << " " << searchPoint.z << ") with K=" << k << std::endl;
if (kdtree.nearestKSearch(searchPoint, k, pointIdxNKNSearch, pointNKNSquaredDistance) > 0) // 执行K近邻搜索
{
return pointIdxNKNSearch;
打印所有近邻坐标
//for (size_t i = 0; i < pointIdxNKNSearch.size(); ++i)
//{
//std::cout << " " << cloud->points[pointIdxNKNSearch[i]].x << " " << cloud->points[pointIdxNKNSearch[i]].y << " " << cloud->points[pointIdxNKNSearch[i]].z << " (squared distance: " << pointNKNSquaredDistance[i] << ")" << std::endl;
//}
}
else
{
return std::vector<int>();
}
}
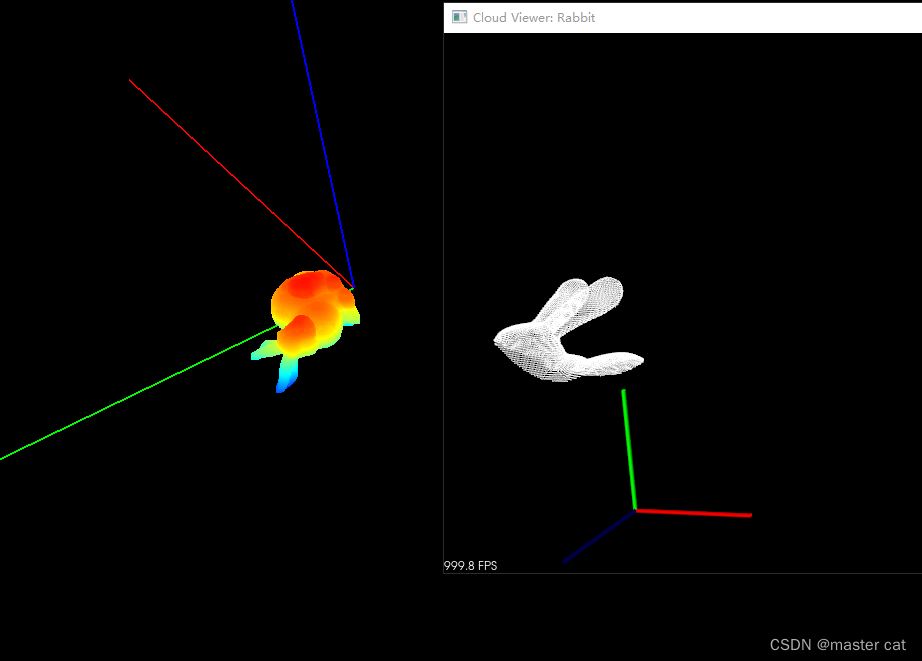
截取出兔子耳朵的部分
半径R内近邻搜索(Radius Neighbors):
- 半径R内近邻搜索是一种基于距离阈值的搜索方法,它会找到距离指定点在半径R范围内的所有邻居点。
- R是搜索半径,指定了要搜索的邻居点的最大距离。
- 该方法适用于需要查找在一定距离范围内的邻居点的情况,例如密度估计和聚类等。
/// <summary>
/// kdtree的半径近邻索引
/// </summary>
/// <param name="cloud">需要所有的点云</param>
/// <param name="searchPoint">需要索引的点</param>
/// <param name="radius">索引半径</param>
/// <returns>返回索引出点的编号数组</returns>
static std::vector<int> kdtreeRadiusSearch(const pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, const pcl::PointXYZ searchPoint, const float radius)
{
// 创建KdTreeFLANN对象,并把创建的点云设置为输入,searchPoint变量作为查询点
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;
kdtree.setInputCloud(cloud);
std::vector<int> pointIdxRadiusSearch; // 存储近邻索引
std::vector<float> pointRadiusSquaredDistance; // 存储近邻对应距离的平方
if (kdtree.radiusSearch(searchPoint, radius, pointIdxRadiusSearch, pointRadiusSquaredDistance) > 0) // 执行半径R内近邻搜索方法
{
return pointIdxRadiusSearch;
}
else
{
return std::vector<int>();
}
}
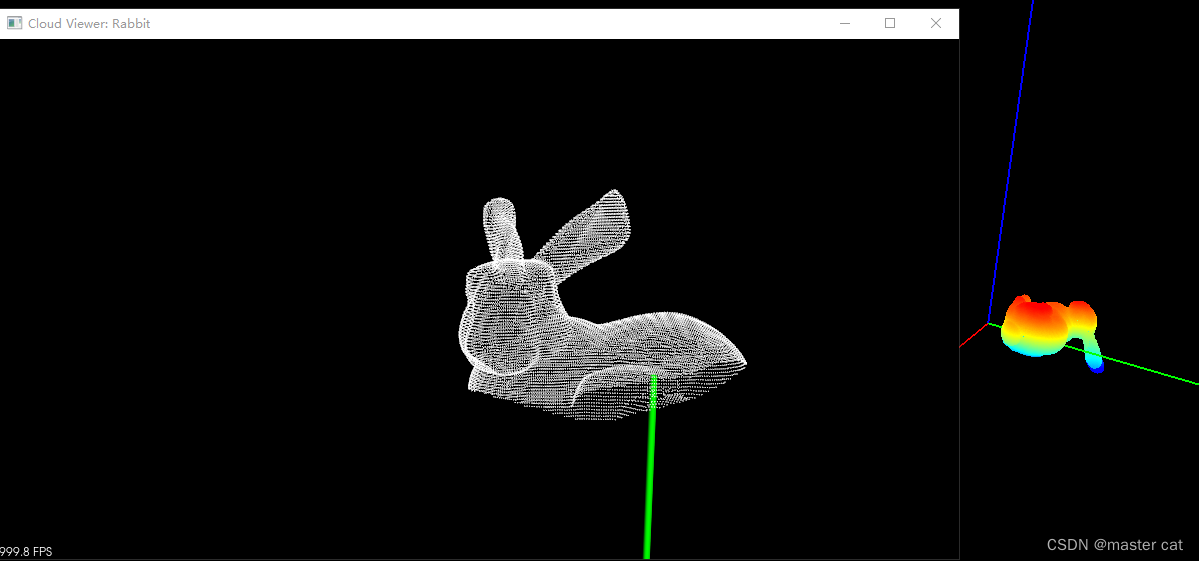
截取出兔子上半身
原文地址:https://blog.csdn.net/mankeywang/article/details/137712747
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!