Nordic-RT-Thread5.1.0移植笔记
关键词:RT-Thread、v17.1.0、softdevie、BLE、HID、mouse、Nordic、52840
资源获取
nRF5x SDK v17.1.0:https://github.com/cbraissant/nRF5_SDK_17.1.0_ddde560
RT-Thread V5.1.0:https://github.com/RT-Thread/rt-thread
ZJ-SDK-RT-Thread-nRF52840:https://github.com/ZJ-TEK/ZJ-SDK-RT-Thread-NORDIC
env的使用需要学习,必须要配置为右键时显示“ConEmu Here”这个选项。
env第一次启动后,不要移动目录,会造成env相关指令执行失败,删掉env文件夹,重新解压启动即可。
移植准备
解压 nRF5x SDK v17.1.0 备用,作为工程的主体
解压 RT-Thread V5.1.0
提取根目录rt-thread-5.1.0\下的RT-Thread相关文件夹备用:
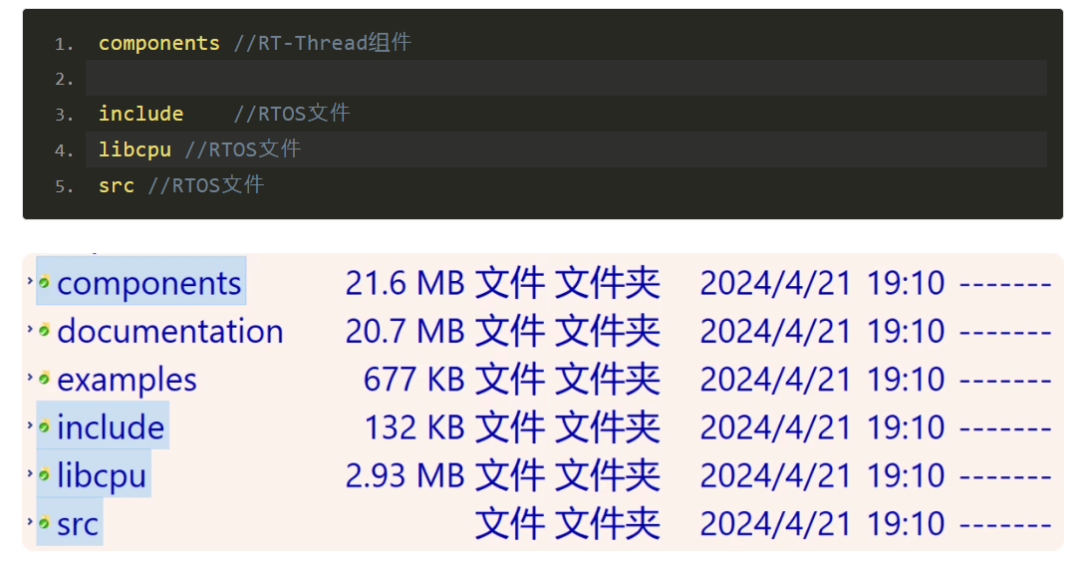
提取 rt-thread-5.1.0\bsp\nrf5x\libraries\drivers 文件夹备用,按需添加到工程;
提取 rt-thread-5.1.0\bsp\nrf5x\nrf52840\board 文件夹备用;
提取 rt-thread-5.1.0\bsp\nrf5x\nrf52840\applications 文件夹备用;
3. 解压 ZJ-SDK-RT-Thread-nRF52840
提取 ZJ-SDK-RT-Thread-NORDIC-master\ZJ_Application_NRF52840\018.ble_nus\NORDIC_SDK\components\libraries\timer 路径下的两个文件备用:

由于当前RT-Thread版本不允许定时器在回调函数里面再次启动定时器,也就是不允许蛇头咬蛇尾。
因此,app_button.c 直接调用 app_timer_rtthread.c 会产生bug,需要通过修改 app_button.c 解决定时器套娃问题。
Keil MDK 移植
RT-Thread源码与相关库添加至nRF5X SDK工程
1. 打开 ble_app_hids_mouse_pca10056_s140.uvprojx 这个工程,在项目资源管理器内创建四个文件夹,分别命名为:
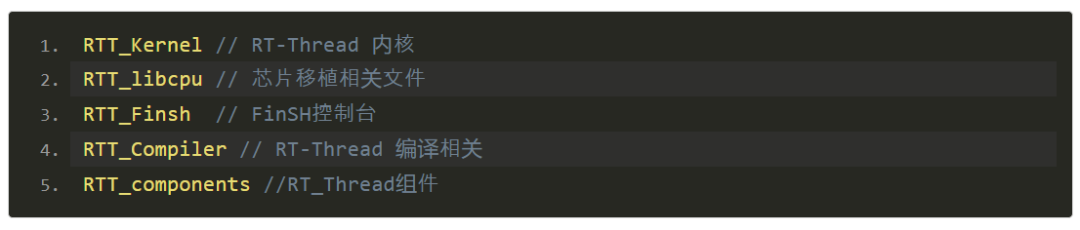
2. 添加RT-Thread源文件,并添加头文件路径;
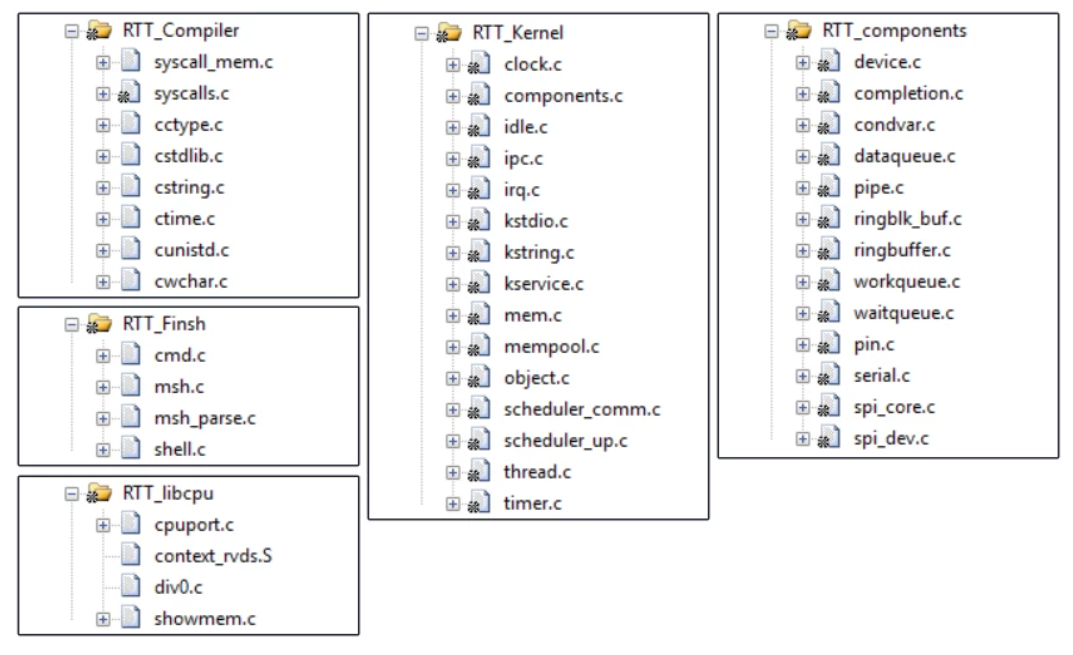
3. RTT_Kernel 文件夹内的文件需要右键添加配置define __RT_KERNEL_SOURCE__,否则相关文件编译会报错;

4. RTT_components 文件夹内的文件需要右键添加配置define __RT_IPC_SOURCE__,否则相关文件编译会报错;

5. nRF_Libraries 文件夹添加 app_timer_rtthread.c,移除或者排除文件夹下的 app_timer2.c 与 drv_rtc.c;

必须覆盖掉app_timer.h,否则编译报错。
6. ALT + F7 打开工程配置,移除 APP_TIMER_V2 与 APP_TIMER_V2_RTC1_ENABLED 两项配置,并添加 __RTTHREAD__ 与 RTTHREAD_ENABLED ;
修改前:

修改后:

7. 需在 rtconfig.h 内添加宏定义 #define RT_TIMER_TICK_PER_SECOND RT_TICK_PER_SECOND,否则 app_timer_rtthread.c 将会出现报错;
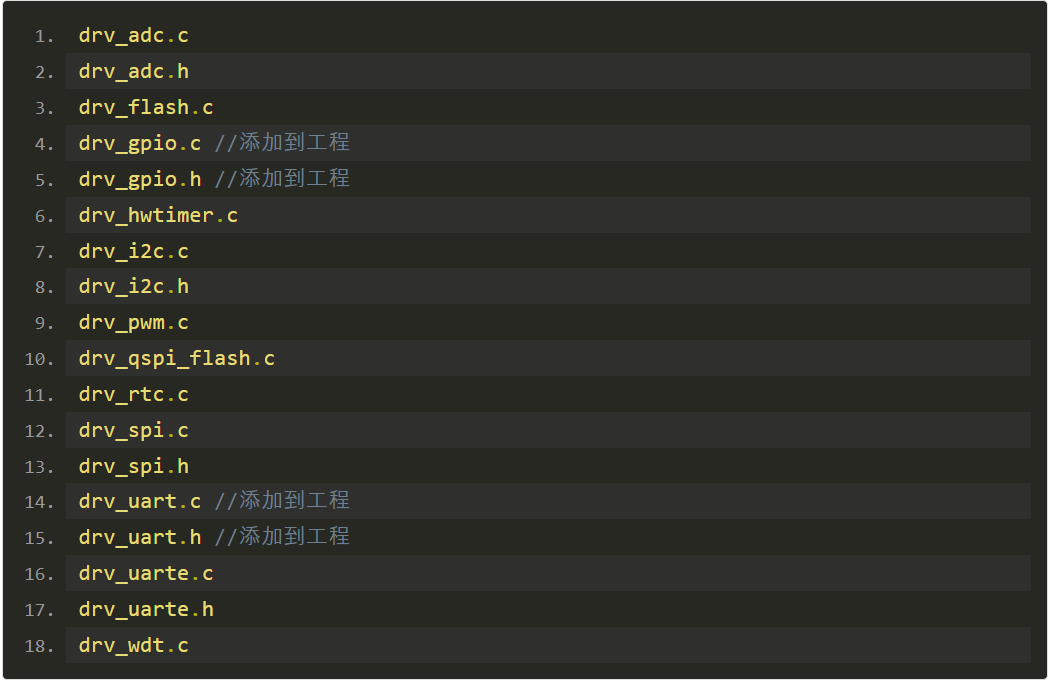
8. 在项目管理器创建 Drivers 文件夹,并添加源文件与头文件;
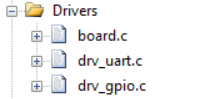
此处文件来自:
rt-thread-5.1.0\bsp\nrf5x\nrf52840\board
rt-thread-5.1.0\bsp\nrf5x\libraries\drivers
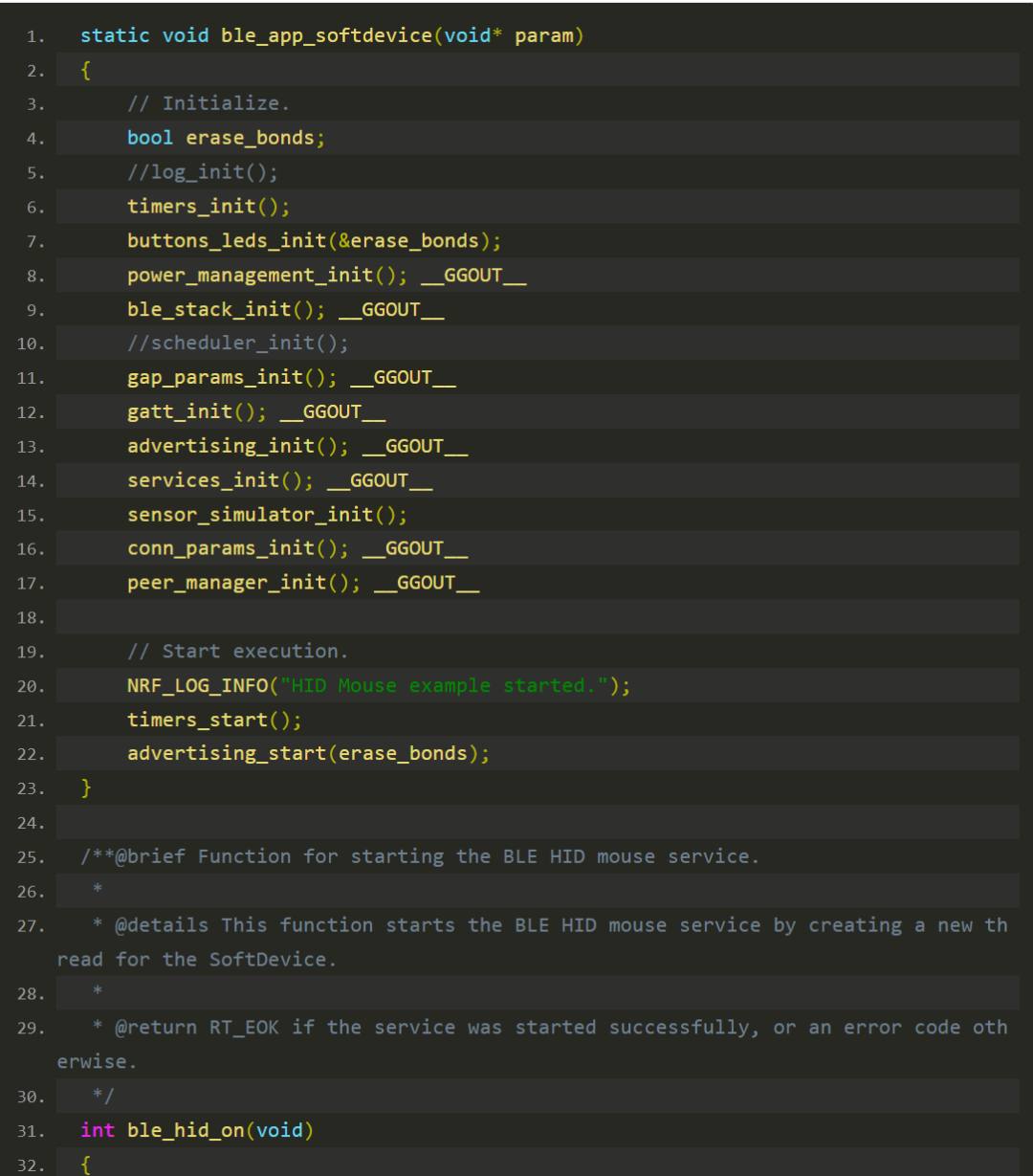
9. Application 文件夹添加 application.c,移除或者排除文件夹下的 main.c ;
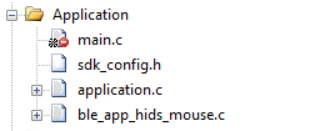
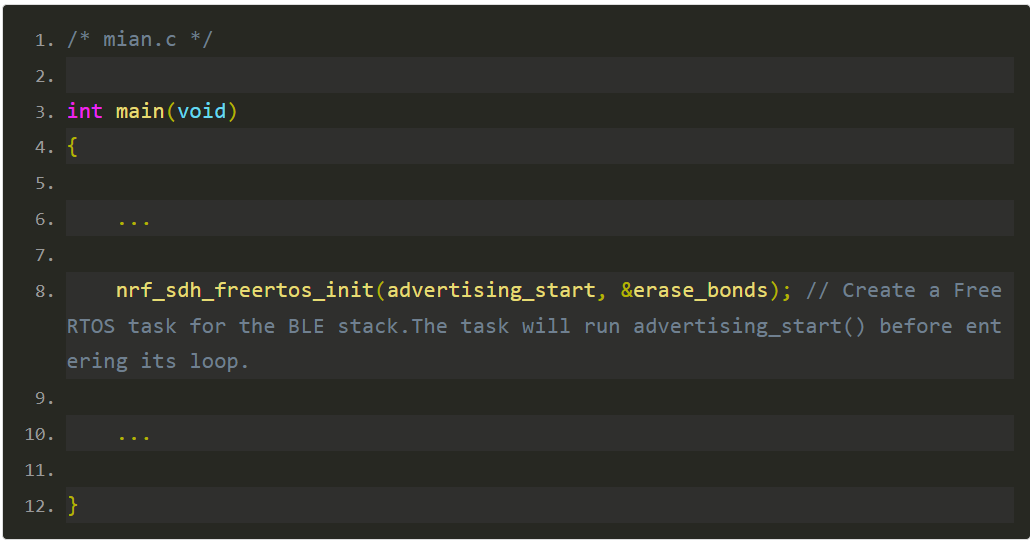
ble_app_hids_mouse.c 为修改后的main.c,在文件夹内复制修改后,添加到Application文件夹,需要进行如下的修改:
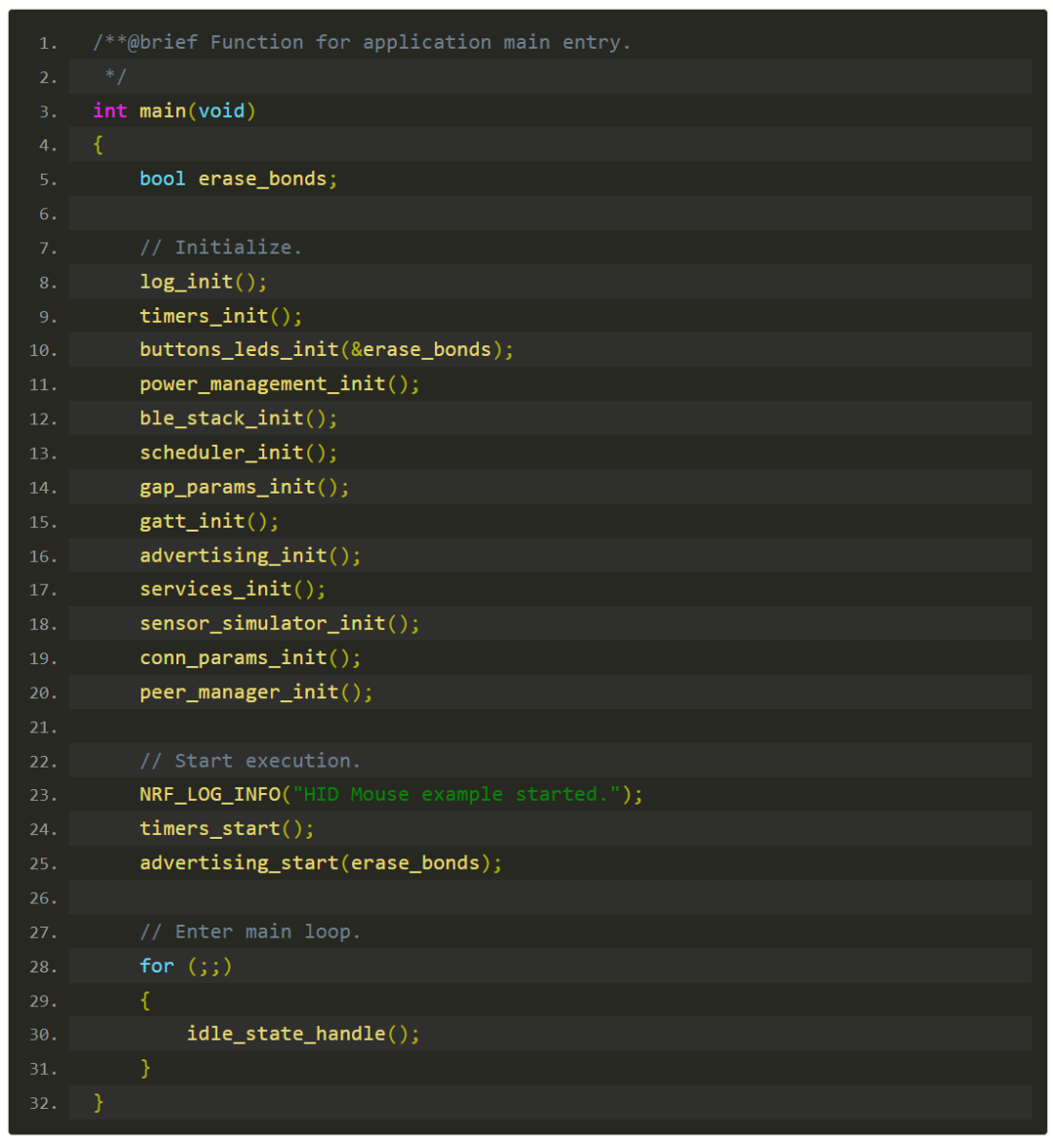
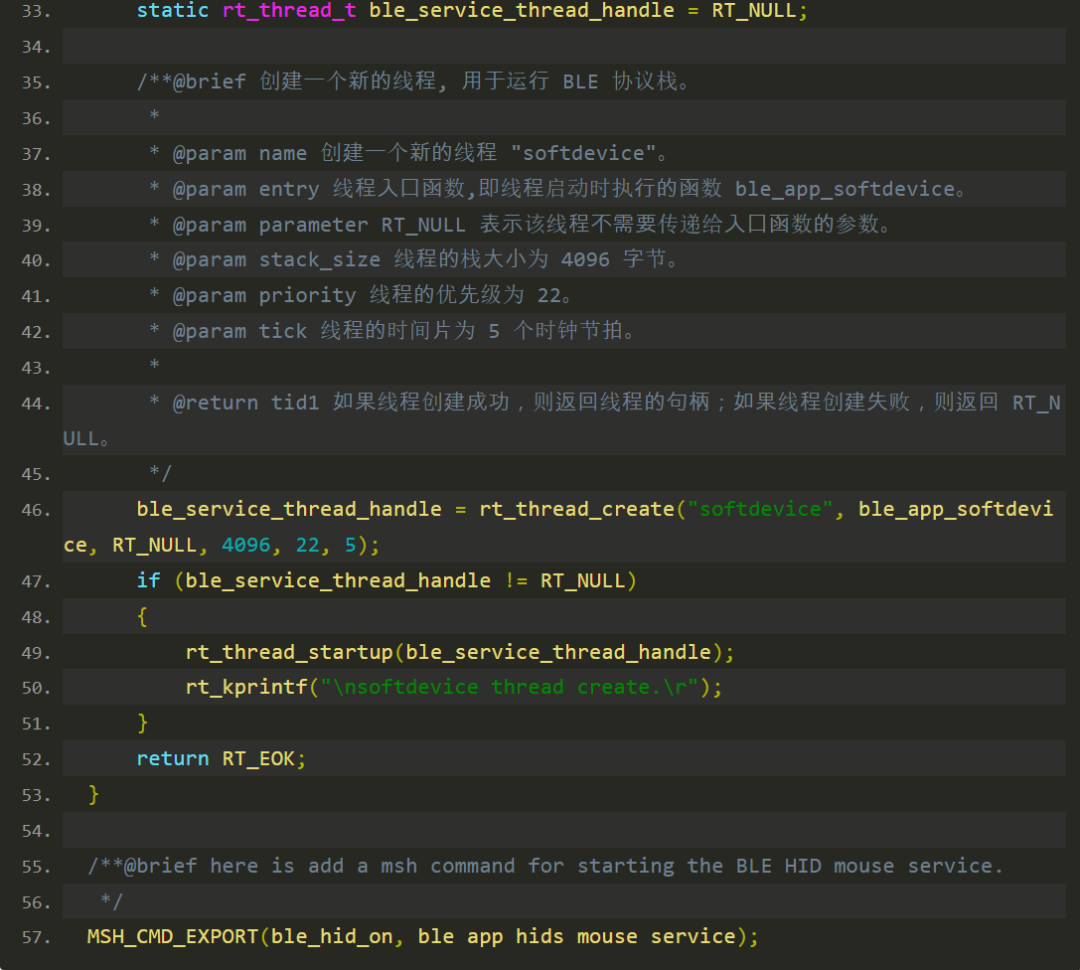
将 mian.c 命名为 ble_app_hids_mouse.c,并将 mian() 修改为下面这段内容:
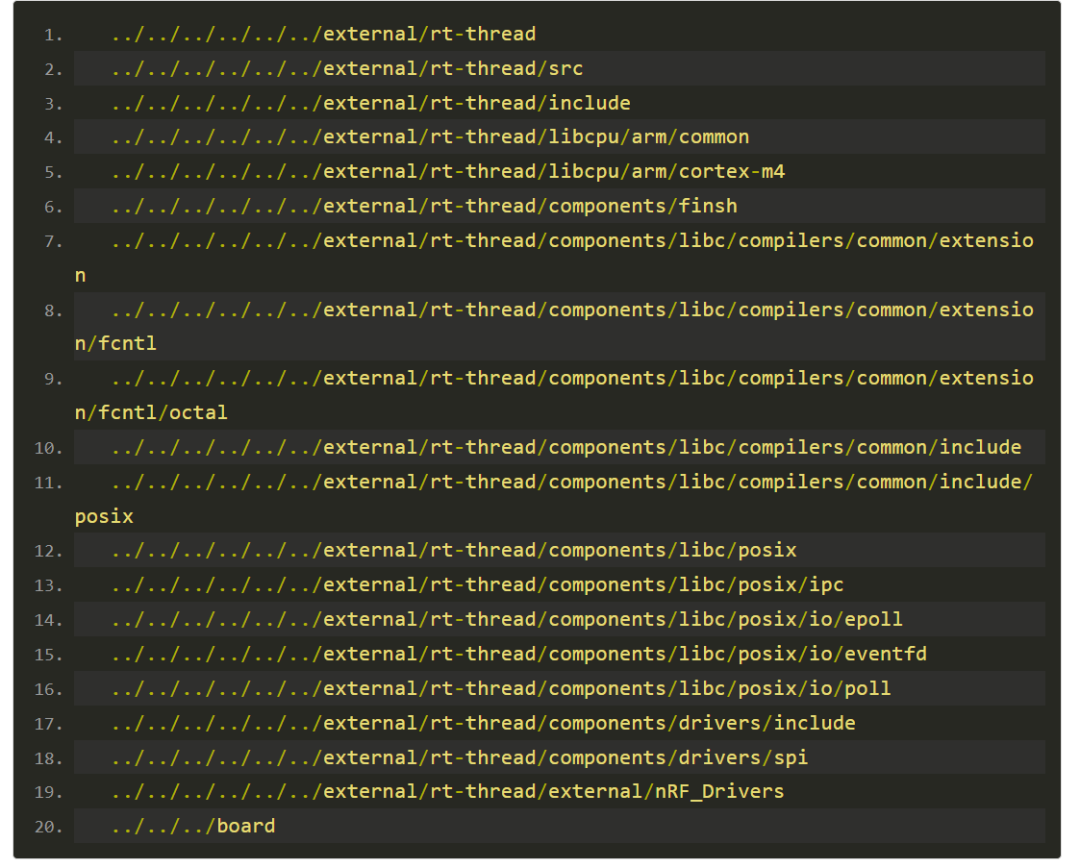
10. 头文件加载路径汇总:
编译无报错,可尝试编译烧录,此时,RT-Thread是可以正常启动的,如果有打印输出,说明可以进入下一步了。
调试报错处理
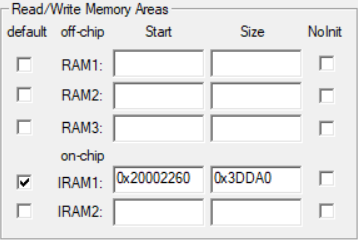
1. 不开启BLE,没有报错,LED闪;开启BLE之后,出现RAM报错。
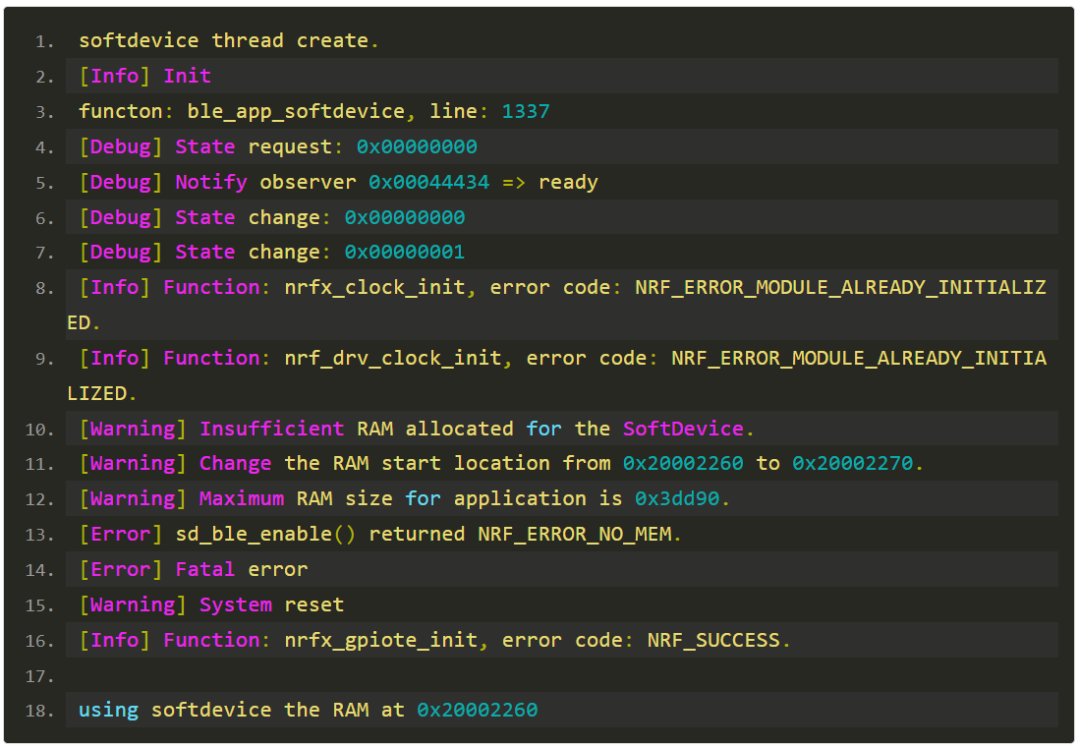
打印 NRF_ERROR_NO_MEM,是内存相关问题,结合上下文,说明可能内存配小了,需要往后挪挪位置。
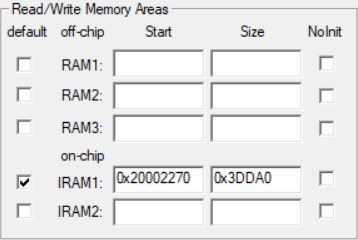
RAM修改:START 0x20002260 变更为 START 0x20002270,Size 倒是可以不用进行修改。
修改前:
修改后:
2. 启动BLE后,闪灯闪烁一段时间之后 或者 PC端进行连接, 然后LED灯就不闪了。
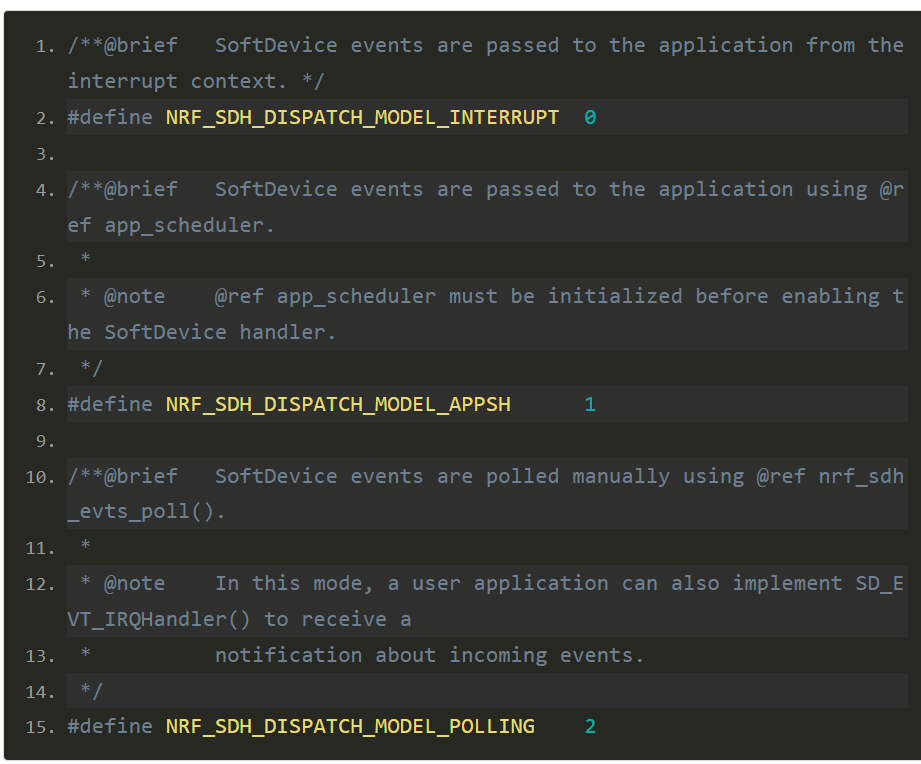
目测是某些机制没启动,导致跑死了,看起来像是EVENT管理,比如 NRF_SDH_DISPATCH_MODEL 之类的没有执行?
为什么会跑死?
NRF_SDH_DISPATCH_MODEL 没有配置好;
极大可能是这个问题,但是,由于是三选一,也不确定是哪个可行。
进入了休眠模式?睡死了?
蓝牙停止广播,理论上不应该让RTOS也睡死。
屏蔽掉进入休眠模式的代码:现象未解除,所以不是睡眠的问题;
通过观察时长,闪烁的时间是30秒左右,而且是打印 Fast advertising. 之后,就没有打印Slow advertising. 。

根据代码推测,应该是服务切换失败了,而服务在Softdevice里面应该是Event相关的内容出了问题,而与Event相关的是 NRF_SDH_DISPATCH_MODEL 这个值,通过百度搜索可以获取到的可以参考的文章是FreeRTOS的相关移植文章:
52832带softdevice工程移植freertos
https://www.eemaker.com/52832-softdevice-freertos.html
“修改sdk_config.h文件中:NRF_SDH_DISPATCH_MODEL 2
该配置的意思是修改softdevice底层事件到应用层的方式,模式2代表是application主动获取。
在freertos的主动获取的实现就是在我们前面添加的nrf_sdh_freertos.c文件中如果用mode0 中断方式通知到应用层,就不需要添加nrf_sdh_freertos.c文件,但是我测试的时候发现会出现蓝牙断开的情况)”
为什么,FreeRTOS可以使用NRF_SDH_DISPATCH_MODEL ?
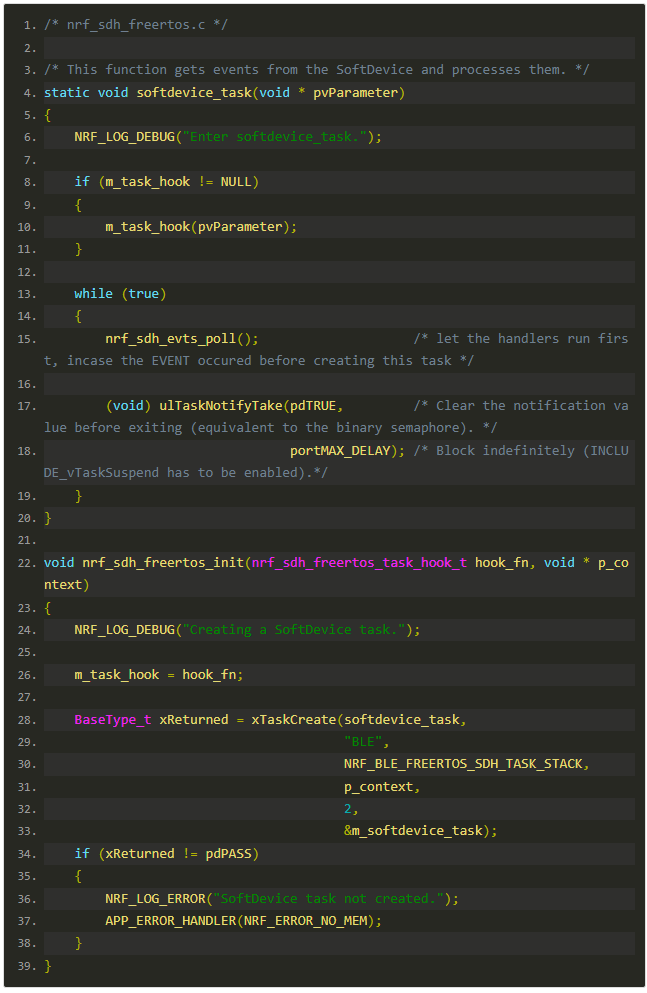
因为官方提供的移植API提供了相关的代码,使用的就是轮询方式。
创建一个Task,然后,在Task里面while()死循环获取事件,相关代码如下:
咨询群友,说是RTOS就应该配置为 2,但是,还是觉得不对劲,总觉得这个事件获取应该是和代码有关,而不是和系统的有无有关。
偶然之下,将 NRF_SDH_DISPATCH_MODEL 的值从 2 设置为 0,解决这个卡死问题,实锤了与系统的有无毫无关联:
0 是中断方式:RT-Thread
1 是app_scheduler:nRF5X SDK Demo
2 是轮询方式:FreeRTOS
中断模式 和 轮询模式 ,这两个哪个更好?不知道了。
Visual Studio + VisualGDB 导入MDK工程
最好是先KEIL MDK搭起来能用的工程,然后再导入到VisualGDB里面,是代码先跑,还是你人先跑,那就不好说了。
创建VisualGDB工程(ARMCC)
1. 偷懒了,不想一个文件一个文件的添加,直接将Keil MDK的项目直接导入到VisualGDB里;
单击【创建新项目】

选择【嵌入式工程向导】

填写【工程名】【方案名】【方案创建路径】
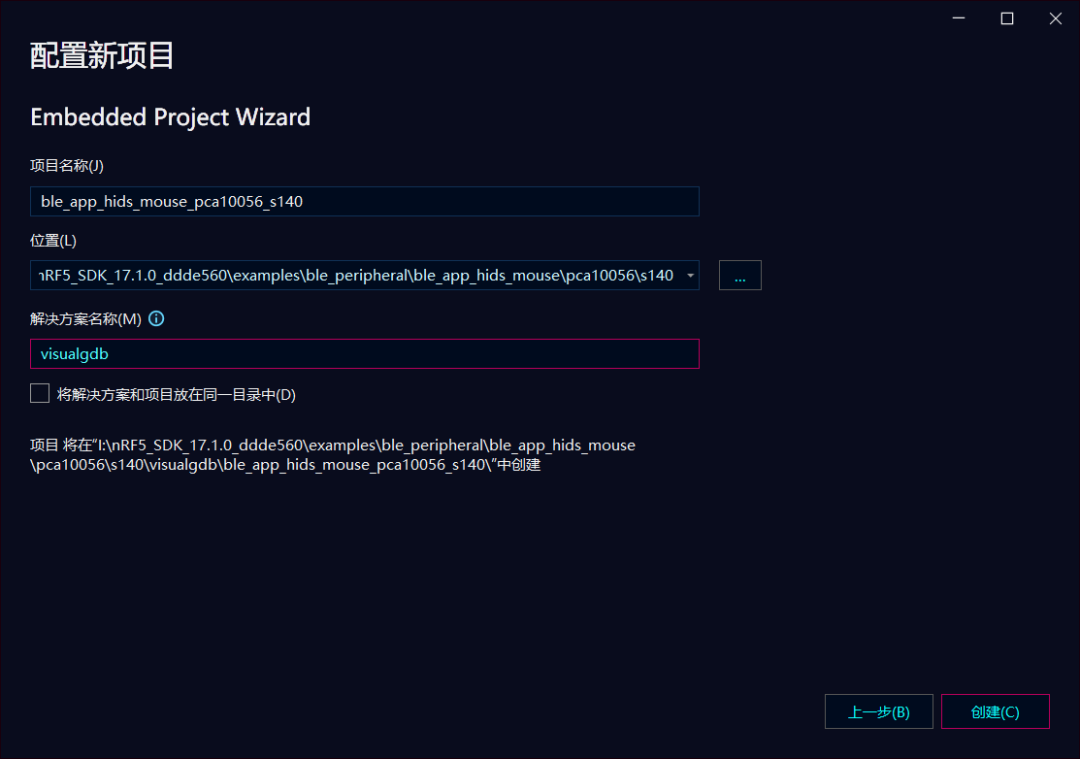
方案(visualgdb) -> 工程(ble_app_hids_mouse_pca10056_s140)
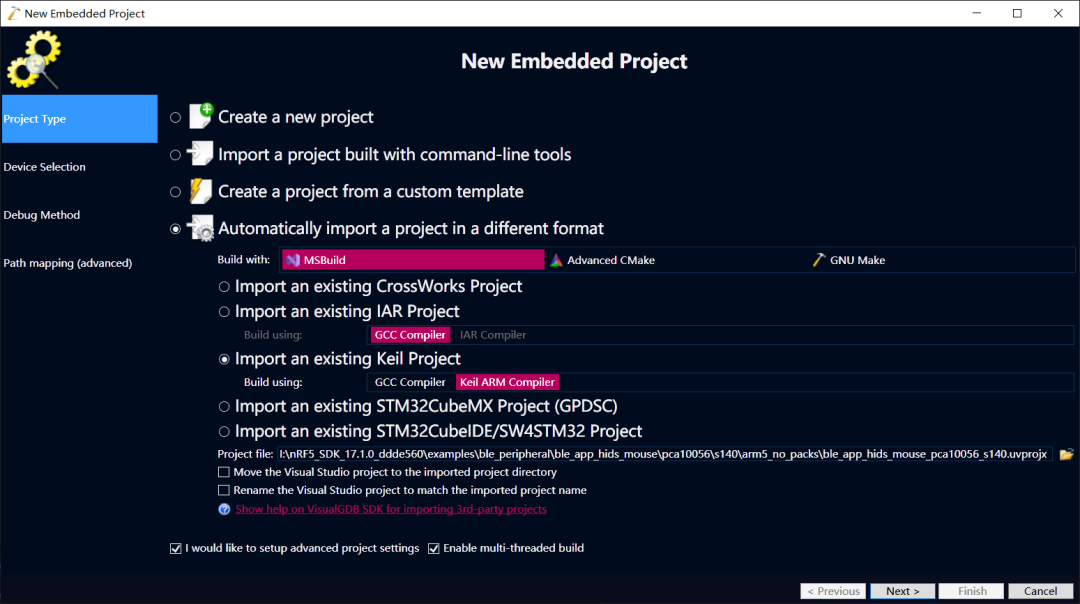
选择【工程类型】【编译器类型】【工程路径】
选择【MCU】,但是这个界面已配置好,点选【Next】即可

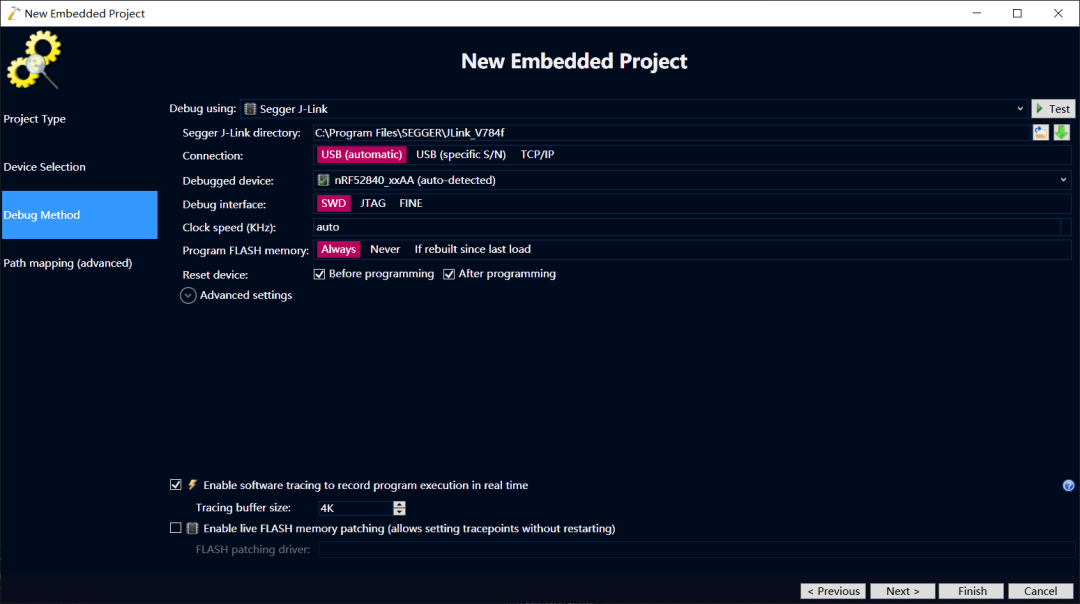
配置 DEBUG的方式,这里选择【J-Llink】、【USB】、【SWD】、【Before programming】、【After programming】,点选【Next】进入下一页
路径映射界面,看不懂,所以直接点击【Finish】结束配置;
完善工程配置(丢失的配置需要补全)
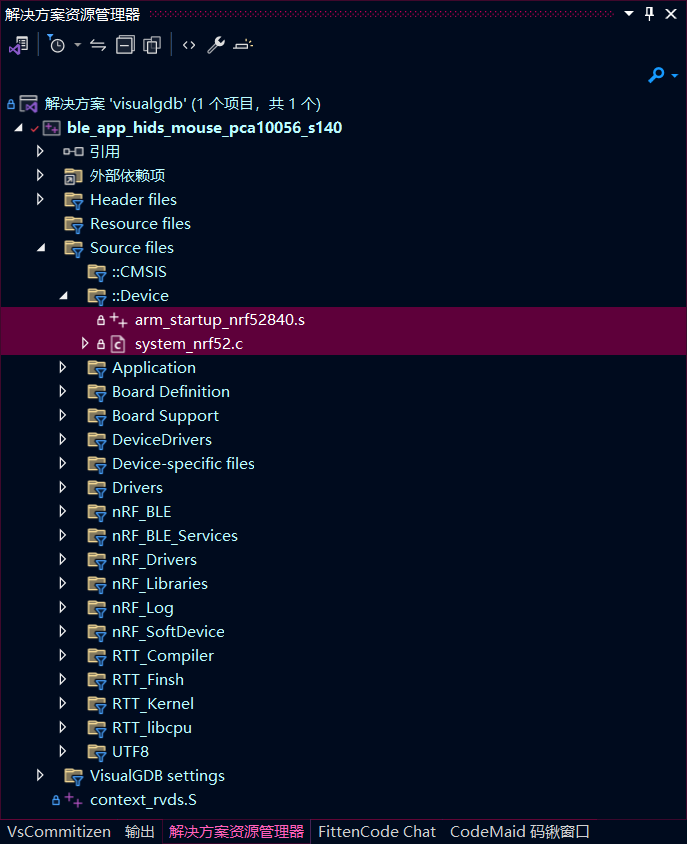
1. 打开左侧的【解决方案资源管理器】,找到筛选器【::Device】,添加图里面的这两个文件到筛选器;
Keil工程也有添加这两个文件,但是,导入工程时丢失了。
2. 执行上述操作后,此时应该还有部分文件没有导入,如果右上角提示有文件没有include,直接点击确认包含即可;
3. 找到 main.c ,app_timer2.c, drv_rt.c ,nrf_sdh_ble_rtt.c ,ble_conn_params_rtt.c 这几个文件:右键 - 属性- Keil Settings - Excluded From Build -> 【是】
4.【右键】点击【ble_app_hids_mouse_pca10056_s140】弹出选单,选择【属性】进入工程配置界面:
5. ble_app_hids_mouse_pca10056_s140 工程配置:
配置应用程序二进制接口:Keil Settings -> Floating-point ABI : Hardware FP (-mfloat-abi=hard)
配置浮点单元类型:Keil Settings -> Floating-point unit type : fpv4-sp-d16 (-mfpu=fpv4-sp-d16)
配置ARM CPU类型:Keil Settings -> ARM CPU type : -mcpu=arm7m
配置ARMCC CPU类型:Keil Settings -> CPU Type for ARMCC/ARMASM : Cortex-M4.fp.sp (--cpu=Cortex-M4.fp.sp)
添加预编译器定义:C/C++ -> Preprocessor -> Preprocessor Definitions :
__RTTHREAD__;RTTHREAD_ENABLED;BOARD_PCA10056;BOARD_PCA10059;NRF52840_XXAA;CONFIG_GPIO_AS_PINRESET;
FLOAT_ABI_HARD;NRF_SD_BLE_API_VERSION=7;S140;SOFTDEVICE_PRESENT;__HEAP_SIZE=8192;__STACK_SIZE=8192;
Keil MDK是用的”,“与” “进行宏的分隔,而VisualGDB只能用”;“去分隔,进入到编辑界面之后,回车换行即可,退出编辑之后,回车会自动转换为”;“
配置C/C++语言标准:C/C++ -> Advanced -> Language Standard for C++ files : C99 (--c99)
配置GNU拓展:C/C++ -> Advanced -> Enable GNU Language Extensions : 否
配置ROM与RAM映射:Linker -> Memory Layout -> Scatter Files : ..\examples\ble_peripheral\ble_app_hids_mouse\pca10056\s140\visualgdb\ble_app_hids_mouse_pca10056_s140\nrf52840_xxaa.sct
如果一开始就是直接作为GCC直接导入,可以从RT-Thread获取模板:
rt-thread-5.1.0\bsp\nrf5x\libraries\templates\nrfx\board\linker_scripts
link.sct简单修改:
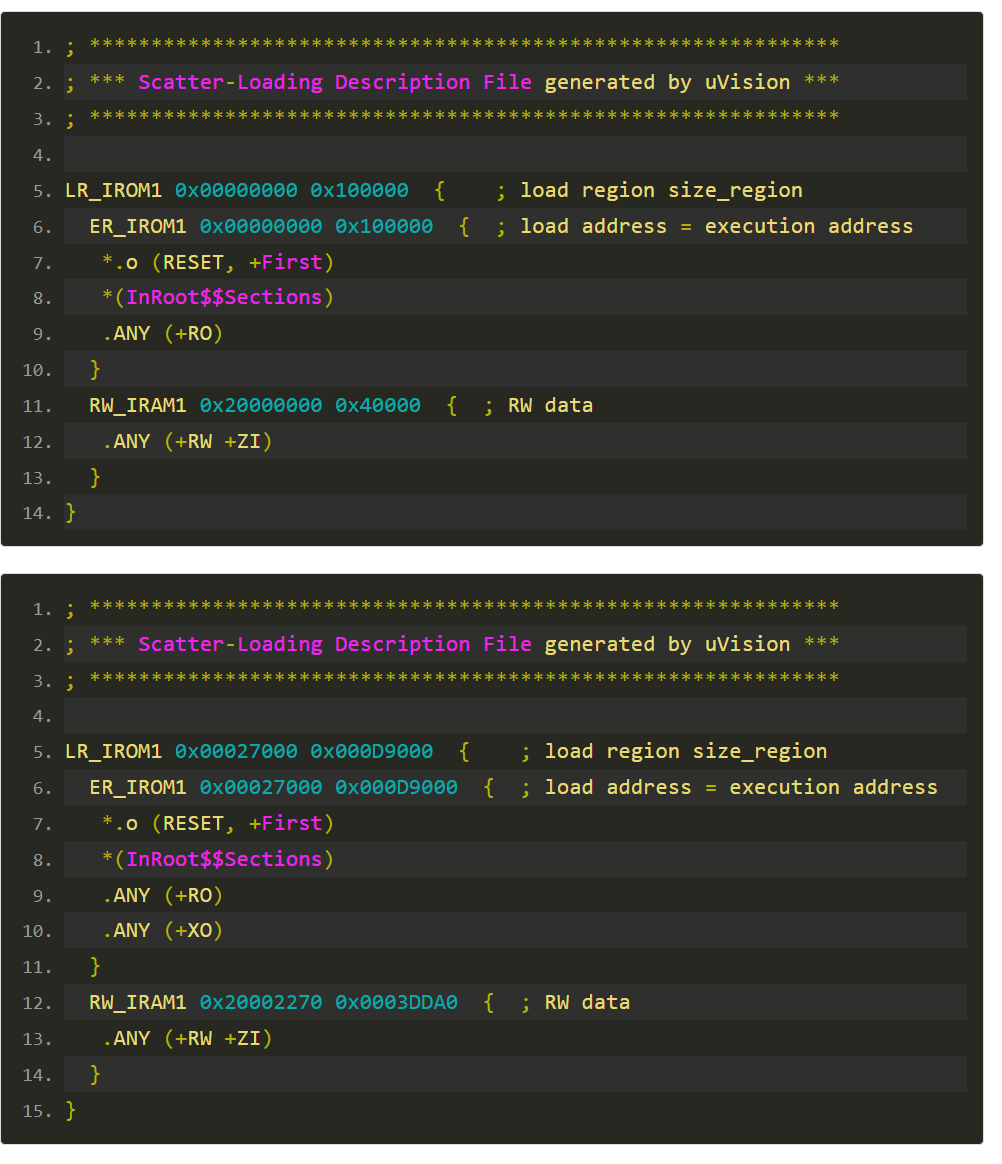
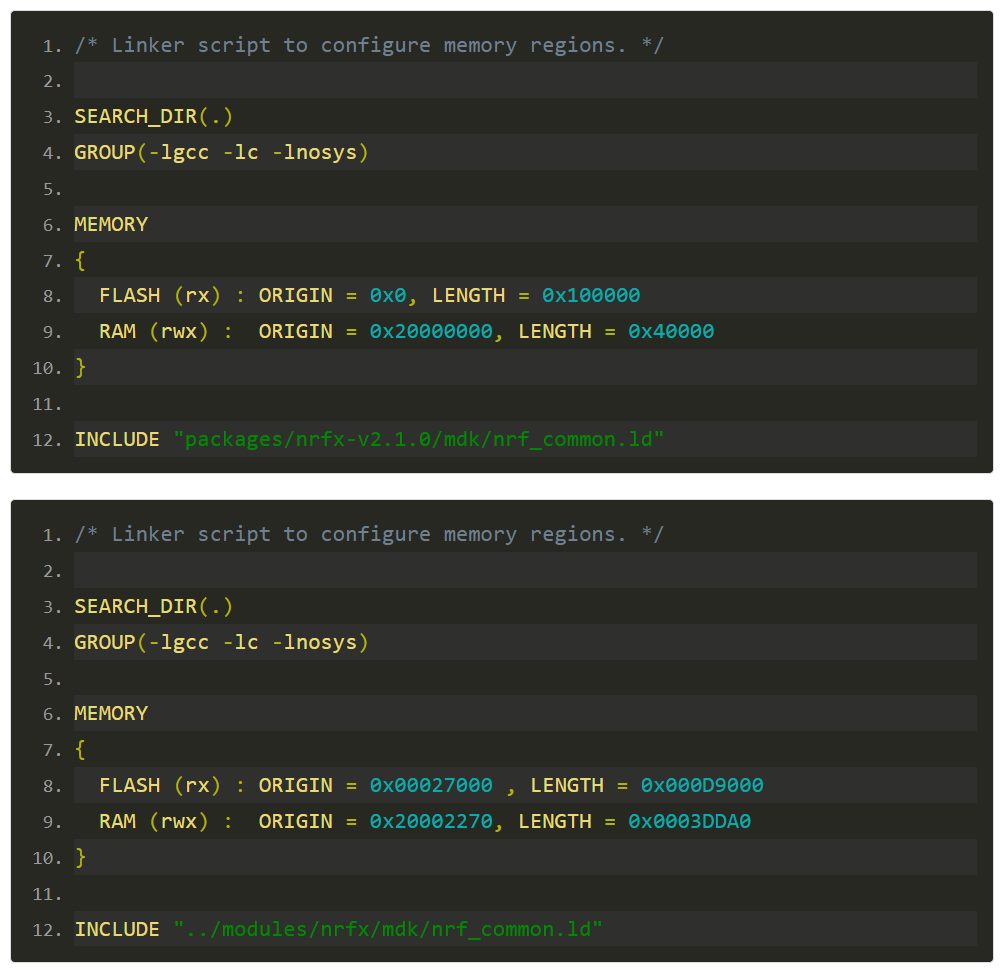
link.lds简单修改:
目前使用的是ARMCC,使用GCC时,内存相关的打印还要根据编译器进行启动地址的打印 :

这时候,一般就编译成功了,有一堆警告,但是,没关系的。
注意,导入成功了,不要随便切回Keil MDK进行编辑,否则再次启动VisualGDB触发改动检测的。
原文地址:https://blog.csdn.net/rtthreadiotos/article/details/142968753
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!