玩转Matlab-Simscape(初级)- 04 - 二级摆建模与分析
**
玩转Matlab-Simscape(初级)- 04 - 二级摆建模与分析
**
前言
在产品开发中,多体动力学控制仿真是一种常见方法,本文从初学者的角度一步一步学习和应用Maltab simscape对多体进行仿真。写这篇博文是为后续做旋翼无人机的多体系统仿真打基础。欢迎各位小伙伴关注、赞赞、留言和收藏。本文将介绍如何使用Simscape Multibody 对二级摆进行建模和分析。
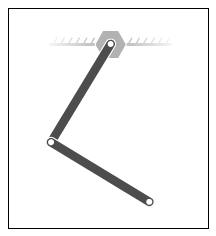
一、模型概述
二级摆是一个简单的运动链,由两个摆杆+1个座构成,它们通过两个铰链关节头串联在一起。固定座代表机械接地,与惯性世界坐标系刚性连接。
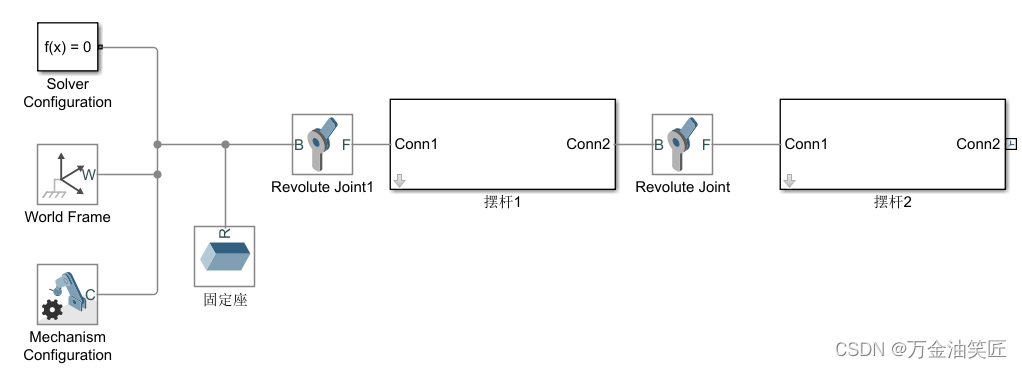
二、建模过程
- 2.1 新建一个模型
- 2.2 拖入所需模块

- 2.3 将玩转Matlab-Simscape(初级)- 01 - 从一个简单模型开始学习之旅中自定义的摆杆模块,拖入模型中,并连线。
三、模块参数设置
- 3.1 在“Revolute Joint”模块对话框中,选择 State Targets > Specify Position Target.
- 3.2 指定两个铰接关节头的初始位置

- 3.3 设置重力加速度方向沿-Y轴方向
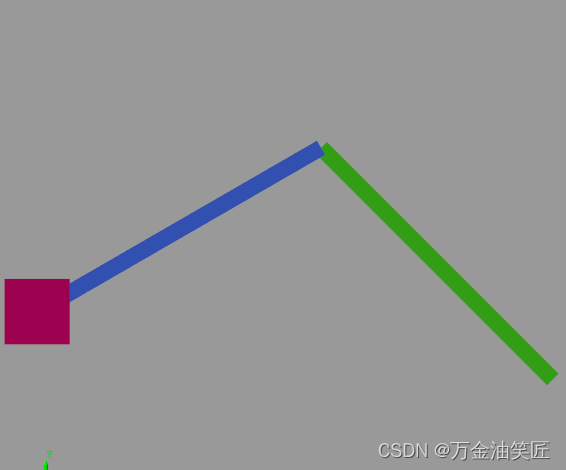
四、模型可视化
- 4.1 在“建模”选项卡中,单击“更新模型”。“力学浏览器”(Mechanics Explorer) 以双摆组件的 3D 视图打开
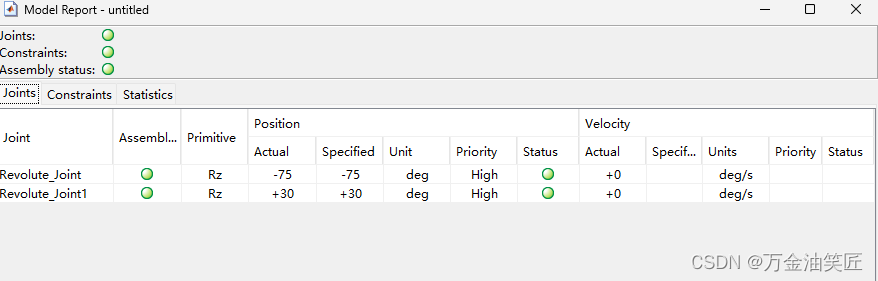
- 4.2 通过选择“工具”(Tools) >“模型报告”(Model Report) 来打开此实用程序。下图显示了双摆的装配信息。
五、仿真模型
运行模拟,Mechanics Explorer 显示双摆组件的 3D 动画,组件由于重力而移动。
六、结果分析
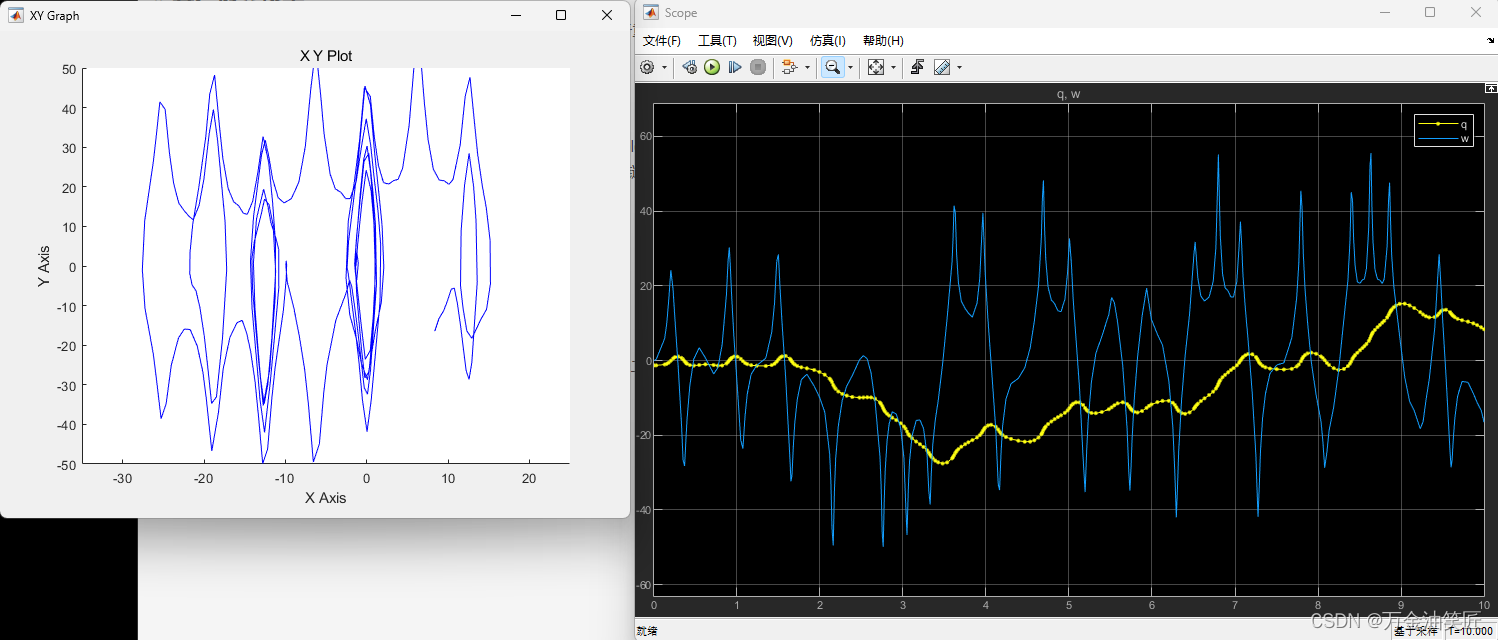
- 按照玩转Matlab-Simscape(初级)- 03 - 单摆模型的分析中的方法可以分析下两个摆杆之间的铰链关节的角位移,角速度情况
如下所示:
总结
- 以上就是今天分享的关于Matlab simscape 的基础内容,简单分析了二级摆的建模与分析过程,模型逐渐变得复杂了,但工建模分析的流程差不多。欢迎各位小伙伴关注、赞赞、留言和收藏。
原文地址:https://blog.csdn.net/lichuanxichina/article/details/138612550
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!