【数据结构进阶】手撕红黑树

🔥个人主页: Forcible Bug Maker
🔥专栏: C++ || 数据结构
目录
🌈前言
本篇博客主要内容:红黑树的介绍,以及底层代码逻辑和实现。
刚刚接触编程的时候就听说有的大厂HR会让手撕红黑树。心中一直对这个数据结构保持着敬畏和向往,今天在将其撕出来后,用本篇博客加以记录,望周知。
🔥红黑树的概念
红黑树,也是一种二叉搜索树,但再每个结点上增加一个存储位置表示结点的颜色,可以是RED(红)或BLACK(黑)。通过对任何一条根到叶子的路径上各个结点的着色方式的限制,红黑树确保没有一条路径会比其他路径长出两倍,因而是接近平衡的。

一颗红黑树,是具有如下性质的二叉搜索树:
- 每个结点不是红色就是黑色
- 根结点是黑色的
- 如果一个结点是红色,则它的两个孩子结点是黑色(即不会有连续的红结点)
- 对于每个结点,从该结点到其所有后代叶结点的简单路径上,均包含相同数目的黑色结点
- 每个叶子结点都是黑色的(此处的叶子结点指的是空结点NIL)
其中,3和4是最重要的两点。
🔥手撕红黑树
红黑树结点的定义
红黑树的结点包含四个成员变量,模板类型T:可以存储K或者pair<K,V>类型,便于后期封装;三个指针:分别为指向左孩子结点的指针,指向右孩子结点的指针,指向父结点的指针;最后变量_col:枚举类型,可以存RED和BLACK。
enum Color
{
RED,
BLACK
};
template<class T>
struct RBTreeNode
{
RBTreeNode<T>(const T& t)
: _data(t)
, _left(nullptr)
, _right(nullptr)
, _parent(nullptr)
, _col(RED)
{}
T _data;
RBTreeNode<T>* _left;
RBTreeNode<T>* _right;
RBTreeNode<T>* _parent;
Color _col;
};
红黑树主体需要实现的成员函数
// T: 可能是键值对<key,value>
// 可能是一个key
// 不论节点中存储的是<key, value> || key, 都是按照key来进行比较的
// KeyOfValue: 提取data中的Key
template<class K, class T, class KeyOfValue>
class RBTree
{
typedef RBTreeNode<T> Node;
public:
typedef RBTreeIterator<T, T&, T*> iterator;
typedef RBTreeIterator<T, const T&, const T*> const_iterator;
public:
RBTree() = default;
RBTree(const RBTree<K, T, KeyOfValue>& t);
// 插入值为data的节点
// 返回值含义:iterator代表新插入节点 bool:代表释放插入成功
std::pair<iterator, bool> Insert(const T& data);
// Begin和End迭代器
iterator Begin();
iterator End();
// 红黑树是否为空,是返回true,否则返回false
bool Empty()const;
// 返回红黑树中有效节点的个数
size_t Size()const;
// 将红黑树中的有效节点删除
void Clear();
// 检测红黑树是否为有效的红黑树,注意:其内部主要依靠_IsValidRBTRee函数检测
bool IsValidRBTRee()
// 在红黑树中查找data,存在赶回该节点对应的迭代器,否则返回End()
iterator Find(const T& data);
~RBTree();
private:
Node* _root;
};
红黑树的插入
红黑树是在二叉搜索树的基础上加上其平衡限制条件,因此红黑树的插入可分为两步:
- 首先是按照二叉搜索树的方式插入结点
- 检测插入结点后,红黑树的性质是否遭到破坏
因为新结点的默认颜色是红色,因此:如果父结点的颜色是黑色,就没有违反性质,不需调整;担当插入结点的父节点也是红色时,就违反了性质3(不能有连在一起的红结点),此时需要对红黑树分情况讨论调整:
约定:cur为当前结点,p为父节点,g为祖父结点,u为叔叔结点。
- 情况一:cur为红,p为红,g为黑,u存在且为红

解决方式:将p,u变成黑色,g变成红色,然后把g改成cur,继续向上调整。
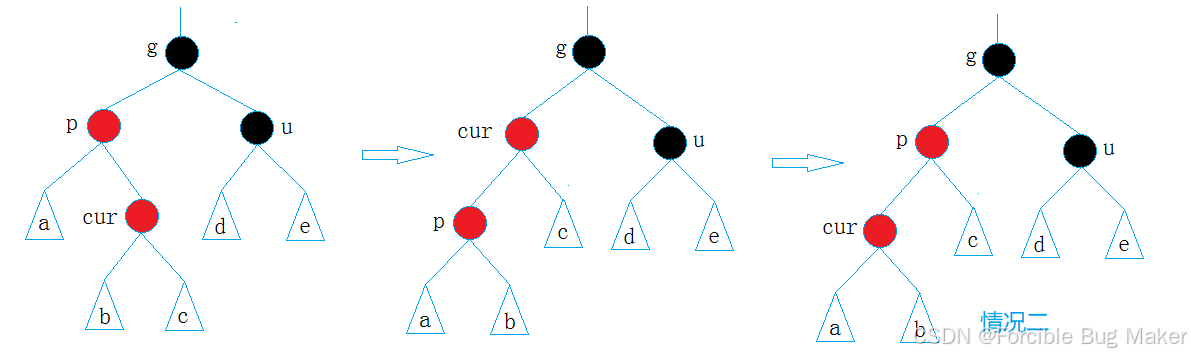
- 情况二:cur为红,p为红,g为黑,u不存在/u存在且为黑(这里需要做的其实就和AVL树中的单旋很像了,我们需要把u结点旋转下来,以维持平衡)

p为g的左孩子,cur为p的左孩子,进行右单旋;相反,p为g的右孩子,cur为p的右孩子,则进行左单旋。p变黑色,g变红色。
- 情况三(情况二的变体):cur为红,p为红,g为黑,u不存在/u存在且为黑(其实就是双旋,除了不用调整平衡因子,其他的和AVL树的双旋并无差别)
p为g的左孩子,cur为p的右孩子,则针对p做左单旋转;相反,p为g的右孩子,cur为p的左孩子,则针对p做右单旋转。然后就转换成了情况2。
针对每种情况进行相应的处理即可:
// 插入值为data的节点
// 返回值含义:iterator代表新插入节点 bool:代表释放插入成功
std::pair<iterator, bool> Insert(const T& data)
{
if (_root == nullptr) {
_root = new Node(data);
_root->_col = BLACK;
return std::make_pair(iterator(_root, _root), true);
}
KeyOfValue kov;
Node* parent = nullptr;
Node* cur = _root;
while (cur) {
if (kov(cur->_data) < kov(data)) {
parent = cur;
cur = cur->_right;
}
else if (kov(cur->_data) > kov(data)) {
parent = cur;
cur = cur->_left;
}
else return std::make_pair(iterator(cur, _root), false);
}
cur = new Node(data);
Node* InsertNode = cur;
if (kov(parent->_data) < kov(data)) {
parent->_right = cur;
cur->_parent = parent;
}
else {
parent->_left = cur;
cur->_parent = parent;
}
while (parent && parent->_col == RED && cur->_col == RED) {
Node* grandParent = parent->_parent;
Node* uncle = nullptr;
// g
// p u
if (grandParent->_left == parent) {
uncle = grandParent->_right;
if (uncle == nullptr || uncle->_col == BLACK) {
if (parent->_left == cur) {
RotateR(grandParent);
parent->_col = BLACK;
grandParent->_col = RED;
}
else {
RotateL(parent);
RotateR(grandParent);
cur->_col = BLACK;
grandParent->_col = RED;
}
break;
}
else {
parent->_col = BLACK;
grandParent->_col = RED;
uncle->_col = BLACK;
cur = grandParent;
parent = grandParent->_parent;
}
}
// g
// u p
else {
uncle = grandParent->_left;
if (uncle == nullptr || uncle->_col == BLACK) {
if (parent->_right == cur) {
RotateL(grandParent);
parent->_col = BLACK;
grandParent->_col = RED;
}
else {
RotateR(parent);
RotateL(grandParent);
cur->_col = BLACK;
grandParent->_col = RED;
}
break;
}
else {
parent->_col = BLACK;
grandParent->_col = RED;
uncle->_col = BLACK;
cur = grandParent;
parent = grandParent->_parent;
}
}
}
_root->_col = BLACK;
return std::make_pair(iterator(InsertNode, _root), true);
}
在红黑树中,由于不用调节平衡因子,双旋的复杂度大大降低,直接使用单旋并在插入过程中调整结点颜色即可。
旋转的具体内容在AVL树中(【数据结构进阶】AVL树)讲解过,这里就不赘述了。
// 左单旋
void RotateL(Node* parent)
{
Node* subR = parent->_right;
Node* subRL = subR->_left;
Node* parentParent = parent->_parent;
if (subRL)
subRL->_parent = parent;
subR->_left = parent;
subR->_parent = parentParent;
parent->_right = subRL;
parent->_parent = subR;
if (parentParent == nullptr) {
_root = subR;
}
else {
if (parentParent->_left == parent) {
parentParent->_left = subR;
}
else
parentParent->_right = subR;
}
}
// 右单旋
void RotateR(Node* parent)
{
Node* subL = parent->_left;
Node* subLR = subL->_right;
Node* parentParent = parent->_parent;
if (subLR)
subLR->_parent = parent;
subL->_right = parent;
subL->_parent = parentParent;
parent->_left = subLR;
parent->_parent = subL;
if (parentParent == nullptr) {
_root = subL;
}
else {
if (parentParent->_left == parent) {
parentParent->_left = subL;
}
else
parentParent->_right = subL;
}
}
find
和二叉搜索树的查找规则相同。
// 在红黑树中查找data,存在赶回该节点对应的迭代器,否则返回End()
iterator Find(const T& data)
{
KeyOfValue kov;
Node* cur = _root;
while (cur) {
if (kov(cur->_data) < kov(data))
cur = cur->_right;
else if (kov(cur->_data) > kov(data))
cur = cur->_left;
else return iterator(cur, _root);
}
return iterator(nullptr, _root);
}
Empty和Size
Empty接口函数用来判断树是否为空;Size用来计算返回树结点的个数。
// 红黑树是否为空,是返回true,否则返回false
bool Empty()const
{
return _root == nullptr;
}
// 返回红黑树中有效节点的个数
size_t Size()const
{
return _Size(_root);
}
size_t _Size(Node* root)
{
return root == nullptr ? 0 : _Size(root->_left) + _Size(root->_right) + 1;
}
拷贝构造
RBTree(const RBTree<K, T, KeyOfValue>& t)
{
_root = _Copy(t._root);
}
Node* _Copy(Node* root)
{
if (root == nullptr)return nullptr;
Node* newRoot = new Node(root->_data);
newRoot->_left = _Copy(root->_left);
newRoot->_right = _Copy(root->_right);
return newRoot;
}
析构函数和clear
// 将红黑树中的有效节点删除
void Clear()
{
_Destroy(_root);
_root = nullptr;
}
~RBTree()
{
_Destroy(_root);
_root = nullptr;
}
void _Destroy(Node* root)
{
if (root == nullptr)return;
_Destroy(root->_left);
_Destroy(root->_right);
delete root;
}
检测是否为合法红黑树
在IsValidRBTRee中,首先算出一条路径上的黑结点个数digit_black,然后在每条路径递归到空结点时判断黑结点个数是否相等,即可验证性质4(所有路径上黑结点个数相等);递归的过程中,判断当前结点和父节点的颜色是否同时为红,即可验证性质3(没有连续的红结点)
// 检测红黑树是否为有效的红黑树,注意:其内部主要依靠_IsValidRBTRee函数检测
bool IsValidRBTRee()
{
if (_root == nullptr)
return true;
Node* cur = _root;
size_t digit_black = 0;
while (cur) {
if (cur->_col == BLACK)
++digit_black;
cur = cur->_left;
}
return _IsValidRBTRee(_root, digit_black, 0);
}
bool _IsValidRBTRee(Node* pRoot, size_t blackCount, size_t pathBlack)
{
if (pRoot == nullptr) {
if (blackCount == pathBlack)
return true;
else return false;
}
if (pRoot->_col == RED && pRoot->_parent->_col == RED) {
return false;
}
if (pRoot->_col == BLACK) {
return _IsValidRBTRee(pRoot->_left, blackCount, pathBlack + 1)
&& _IsValidRBTRee(pRoot->_right, blackCount, pathBlack + 1);
}
else {
return _IsValidRBTRee(pRoot->_left, blackCount, pathBlack)
&& _IsValidRBTRee(pRoot->_right, blackCount, pathBlack);
}
}
Begin和End
这两个函数用于获取红黑树的头对象和尾迭代器。
// Begin和End迭代器
iterator Begin()
{
return iterator(_LeftMost(), _root);
}
iterator End()
{
return iterator(nullptr, _root);
}
// 获取红黑树最左侧节点
Node* _LeftMost()
{
if (_root == nullptr)
return nullptr;
Node* parent = _root;
Node* cur = parent->_left;
while (cur) {
parent = cur;
cur = cur->_left;
}
return parent;
}
红黑树的迭代器接口
迭代器的好处是可以方便遍历,使数据结构的底层实现变的透明,从而降低代码编写的复杂程度。
template<class T, class Ref, class Ptr>
struct RBTreeIterator
{
typedef RBTreeNode<T> Node;
typedef RBTreeIterator<T, Ref, Ptr> Self;
RBTreeIterator(Node* pNode,Node* root)
: _pNode(pNode)
,_root(root)
{}
// 让迭代器具有类似指针的行为
Ref operator*();
Ptr operator->();
// 然迭代器可以移动:前置/后置++
Self& operator++();
Self operator++(int);
// 然迭代器可以移动:前置/后置--
Self& operator--();
Self operator--(int);
// 让迭代器可以比较
bool operator!=(const Self& s)const;
bool operator==(const Self& s)const;
private:
Node* _pNode;
Node* _root;
};
* 解引用和 -> 访问
// 让迭代器具有类似指针的行为
Ref operator*()
{
return _pNode->_data;
}
Ptr operator->()
{
return &(_pNode->_data);
}
operator++()
二叉树的中序遍历并不难实现,但是要实现从任意一个结点按中序遍历跑到下一个结点,这就有相当难度了。
具体逻辑为:
- 右子树不为空,访问右子树的最左结点。
- 右子树为空(代表当前结点所在子树访问完了),沿着到根节点的路线,孩子是父亲左的那个祖先结点,就是下一个要访问的结点。
// 迭代器可以移动:前置/后置++
Self& operator++()
{
if (_pNode->_right) {
_pNode = _pNode->_right;
while (_pNode->_left)
_pNode = _pNode->_left;
}
else {
Node* cur = _pNode;
Node* parent = cur->_parent;
while (parent && cur == parent->_right) {
cur = parent;
parent = parent->_parent;
}
_pNode = parent;
}
return *this;
}
Self operator++(int)
{
Node* rem = _pNode;
if (_pNode->_right) {
_pNode = _pNode->_right;
while (_pNode->_left)
_pNode = _pNode->_left;
}
else {
Node* cur = _pNode;
Node* parent = cur->_parent;
while (parent && cur == parent->_right) {
cur = parent;
parent = parent->_parent;
}
_pNode = parent;
}
return Self(rem);
}
operator- - ()
这时候要判断当前迭代器是否指向尾End(),同时判断树是否为空,这就要用到传入迭代器对象中的_root了。在找到End()的前一个结点之后,按照和operator++()相反的逻辑即可实现operator--()。
具体逻辑为:
- 左子树不为空,访问左子树的最右结点。
- 左子树为空(代表当前结点所在子树访问完了),沿着到根结点的路线,孩子是父亲右的那个祖先结点,就是下一个要访问的结点。
// 迭代器可以移动:前置/后置--
Self& operator--()
{
if (_pNode == nullptr) {
if (_root == nullptr)
assert(false);
Node* parent = _root;
Node* cur = parent->_right;
while (cur) {
parent = cur;
cur = cur->_right;
}
_pNode = parent;
return *this;
}
if (_pNode->_left) {
_pNode = _pNode->_left;
while (_pNode->_right)
_pNode = _pNode->_right;
}
else {
Node* cur = _pNode;
Node* parent = cur->_parent;
while (parent && cur == parent->_left) {
cur = parent;
parent->_parent;
}
_pNode = parent;
}
return *this;
}
Self operator--(int)
{
if (_pNode == nullptr) {
if (_root == nullptr)
assert(false);
Node* parent = _root;
Node* cur = parent->_right;
while (cur) {
parent = cur;
cur = cur->_right;
}
_pNode = parent;
return Self(nullptr);
}
Node* rem = _pNode;
if (_pNode->_left) {
_pNode = _pNode->_left;
while (_pNode->_right)
_pNode = _pNode->_right;
}
else {
Node* cur = _pNode;
Node* parent = cur->_parent;
while (parent && cur == parent->_left) {
cur = parent;
parent->_parent;
}
_pNode = parent;
}
return Self(rem);
}
迭代器比较相等
底层就是用指针作比较。
// 让迭代器可以比较
bool operator!=(const Self& s)const
{
return _pNode != s._pNode;
}
bool operator==(const Self& s)const
{
return _pNode == s._pNode;
}
🌈结语
红黑树和AVL树都是高效的平衡二叉树,增删改查的时间复杂度都是O(
l
o
g
2
N
log_2 N
log2N),红黑树不追求绝对平衡,其只需保证最长路径不超过最短路径的2倍,相对而言,降低了插入和旋转的次数,所以在经常进行增删的结构中性能比AVL树更优,而且红黑树实现比较简单,所以实际运用中红黑树更多。
红黑树的底层实现到这里就要结束了,本篇的数据结构较为复杂,模板的使用也有很多容易出错的点,需要多加体会。感谢大家的支持♥
原文地址:https://blog.csdn.net/2303_79329831/article/details/140778581
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!