27 基于51单片机的方向盘模拟系统
目录
一、主要功能
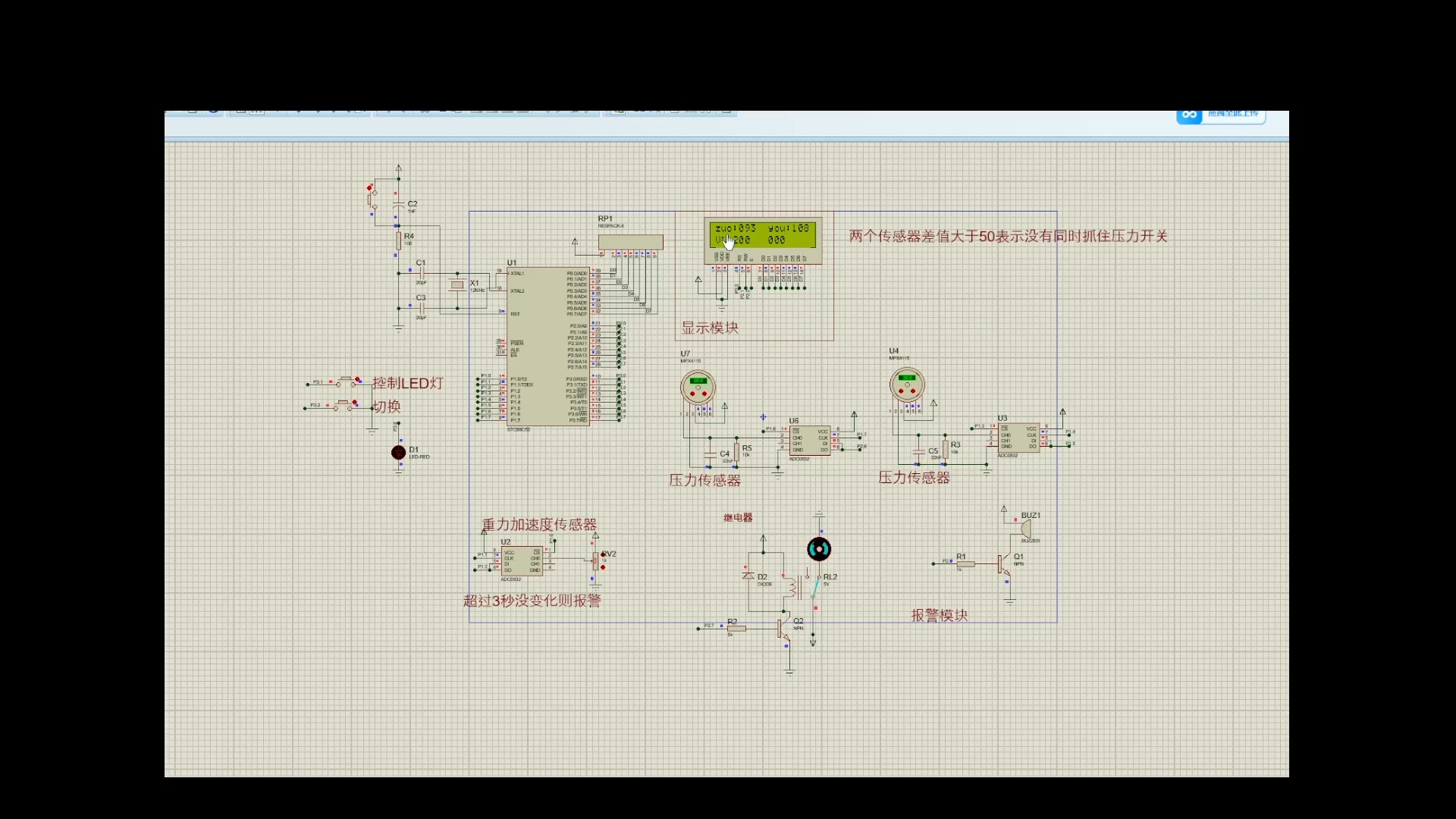
基于STC89C52单片机,采用两个MPX4115压力传感器作为两路压力到位开关电路,
采用滑动变阻器连接数模转换器模拟重力加速度传感器电路;
一个按键控制LED灯的点亮与熄灭;两路压力值与加速度值通过LCD1602显示屏显示;
如果加速度的值3秒内没没有变化,或者两个压力传感器的差值大于50
(这里设置差值小于50表示双手同时抓住方向盘的到位开关了,如果大于50,则不是同时抓住,
因为仿真里没法同时按两个东西,所以采取差值替代。)
则蜂鸣器报价,且继电器断开,继电器控制的电机停止转动。
反之,不报警,继电器控制电机继续转动。
二、硬件资源
基于KEIL5编写C++代码,PROTEUS8.15进行仿真,全部资源在页尾,提供安装包。
 编辑
编辑
三、程序编程
#include <REGX52.H>#include <intrins.h>#include <stdio.h>#include "Delay.h"#include "LCD1602.h"#define uchar unsigned char#define uint unsigned intsbit beep = P2^5; //蜂鸣器引脚sbit CS=P1^0; //adc0832引脚sbit CLK=P1^1;
sbit DIO=P1^2;
sbit CS1=P1^3; //adc0832引脚sbit CLK1=P1^4;
sbit DIO1=P1^5;
sbit CS2 = P1^6; //ADC0832引脚定义sbit CLK2 = P1^7;
sbit DIO2 = P2^6;
sbit motor = P2^7;
sbit key = P3^1;
sbit led = P3^0;
sbit key1 = P3^2;static int timerCount;typedef unsigned char u8;typedef unsigned int u16;static uchar u,U,R ,u1,U1,R1,u2,U2,R2,lastResistance; //定义变量static int number;static int resistanceChanged;static int flag = 0;void beep\_warning();void Time0\_Init() //定时器初始化{
TMOD = 0x01; // 定时器0工作在模式1
TH0 = 0xfa >> 8;
TL0 = 0xfa & 0xFF;
ET0 = 1; // 开启定时器0中断
TR0 = 1; // 启动定时器0
EA =0;
}void Time0_Int() interrupt 1 //中断程序{ static unsigned int timerCount = 0;
TH0 = 0xfa >> 8;
TL0 = 0xfa & 0xFF;
timerCount++; // 每隔三秒检查阻值是否发生变化
if (timerCount >= 27)
{
timerCount = 0;
// 比较当前阻值与上一次的阻值是否相同
if (R != lastResistance)
{ // 阻值发生了变化
resistanceChanged = 0;
} else
{
resistanceChanged = 1;
} // 更新上一次的阻值
lastResistance = R;
}
}uchar get\_AD\_Res() //ADC0832启动读取函数 {
uchar i, data1=0, data2=0;
CS=0;
CLK=0;DIO=1;\_nop\_();
CLK=1;\_nop\_();
CLK=0;DIO=1;\_nop\_();
CLK=1;\_nop\_();
CLK=0;DIO=0;\_nop\_();
CLK=1;\_nop\_();
CLK=0;DIO=1;\_nop\_();
for(i=0; i<8; i++)
{
CLK=1;\_nop\_();
CLK=0;\_nop\_();
data1=(data1<<1)|(uchar)DIO;
}
for(i=0; i<8; i++)
{
data2=data2|(uchar)DIO<<i;
CLK=1;\_nop\_();
CLK=0;\_nop\_();
}
CS=1;
return(data1 == data2)?data1:0;
}uchar get\_AD\_Res1() //ADC0832启动读取函数 {
uchar i, data1=0, data2=0;
CS1=0;
CLK1=0;DIO1=1;\_nop\_();
CLK1=1;\_nop\_();
CLK1=0;DIO1=1;\_nop\_();
CLK1=1;\_nop\_();
CLK1=0;DIO1=0;\_nop\_();
CLK1=1;\_nop\_();
CLK1=0;DIO1=1;\_nop\_();
for(i=0; i<8; i++)
{
CLK1=1;\_nop\_();
CLK1=0;\_nop\_();
data1=(data1<<1)|(uchar)DIO1;
}
for(i=0; i<8; i++)
{
data2=data2|(uchar)DIO1<<i;
CLK1=1;\_nop\_();
CLK1=0;\_nop\_();
}
CS1=1;
return(data1 == data2)?data1:0;
}uchar get\_AD\_Res2() //ADC0832启动读取函数 {
uchar i, data1=0, data2=0;
CS2=0;
CLK2=0;DIO2=1;\_nop\_();
CLK2=1;\_nop\_();
CLK2=0;DIO2=1;\_nop\_();
CLK2=1;\_nop\_();
CLK2=0;DIO2=0;\_nop\_();
CLK2=1;\_nop\_();
CLK2=0;DIO2=1;\_nop\_();
for(i=0; i<8; i++)
{
CLK2=1;\_nop\_();
CLK2=0;\_nop\_();
data1=(data1<<1)|(uchar)DIO2;
}
for(i=0; i<8; i++)
{
data2=data2|(uchar)DIO2<<i;
CLK2=1;\_nop\_();
CLK2=0;\_nop\_();
}
CS2=1;
return(data1 == data2)?data1:0;
}void beep_warning() //报警并且电机转动{
number = R1-R2;if(number<=0)
{
number = ~(number-1);
}if(flag==0)
{
EA = 0;if(number>50)
{
beep = 1; //报警
motor = 1;//断开继电器
}else
{
beep = 0;
motor = 0;
}
}
if(flag==1)
{if(resistanceChanged==1)
{
beep = 1; //报警
motor = 1;//断开继电器
}else
{
beep = 0;
motor = 0;
}
}LCD_ShowNum(2,10,resistanceChanged,3);
}void main() //主函数{
beep=0; //蜂鸣器关掉
motor=0; //启动继电器
led = 0;LCD_Init(); //显示屏初始化
Time0\_Init();LCD\_ShowString(1,1,"zuo:");LCD\_ShowString(1,10,"you:");LCD\_ShowString(2,1,"Vt:");while(1)
{
u=get\_AD\_Res();
U=(250*u)/128; //此处将数字信号转化为模拟信号,要根据上拉电阻阻值来确定
R=200*U/250; //重力
u1=get\_AD\_Res1();
U1=(250*u1)/128; //此处将数字信号转化为模拟信号,要根据上拉电阻阻值来确定
R1=200*U1/250; //压力右
u2=get\_AD\_Res2();
U2=(250*u2)/128; //此处将数字信号转化为模拟信号,要根据上拉电阻阻值来确定
R2=200*U2/250; //压力左
LCD_ShowNum(1,5,R2,3); //第一行显示左压力
LCD_ShowNum(1,14,R1,3); //第一行显示右压力
LCD_ShowNum(2,4,R,3); //第二行显示重力加速度
beep_warning(); //压力与重力处理报警函数
if(!key)
{
led=~led;while(!key);
}
if(~key1)
{
EA=1;
flag++;
{if(flag>1)
{
flag = 0;
}
}while(~key1);
}
}
}
四、实现现象
具体动态效果看B站演示视频:
基于51单片机的方向盘模拟系统
全部资料(源程序、仿真文件、安装包、演示视频):
原文地址:https://blog.csdn.net/weixin_70360261/article/details/142587083
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!