MQTT & micro-ROS:构建高效的机器人应用
什么是 micro-ROS?
在之前的 MQTT & FreeRTOS:打造你的远程控制实时应用 中,我们介绍了如何在 FreeRTOS 中构建你的 MQTT 应用。
FreeRTOS 主要应用在对实时性要求较高的场景中,但这类 RTOS 专注于提供实时任务调度和同步机制等基础功能,对于机器人应用需要的机器视觉、地图建模以及路径规划等高级功能缺少支持。
在机器人应用开发中,拥有丰富生态的开源机器人操作系统 ROS 通常是最佳的选择。但 ROS 往往运行在 Linux 或 Windows 上,无法提供严格的实时性保证。
于是 micro-ROS 由此诞生,它是 ROS 2 的一个子项目。它运行在 RTOS 之上,因此得以保证实时性。同时它支持所有主要的 ROS 概念,例如节点、发布/订阅、客户端/服务等,因此可以非常紧密地与 ROS 2 生态集成。
在这篇文章中,我们将继续探索,如何在 FreeRTOS 中运行 micro-ROS,并最终通过 MQTT 协议与 EMQX 集成。
使用 MQTT 与 micro-ROS 构建应用
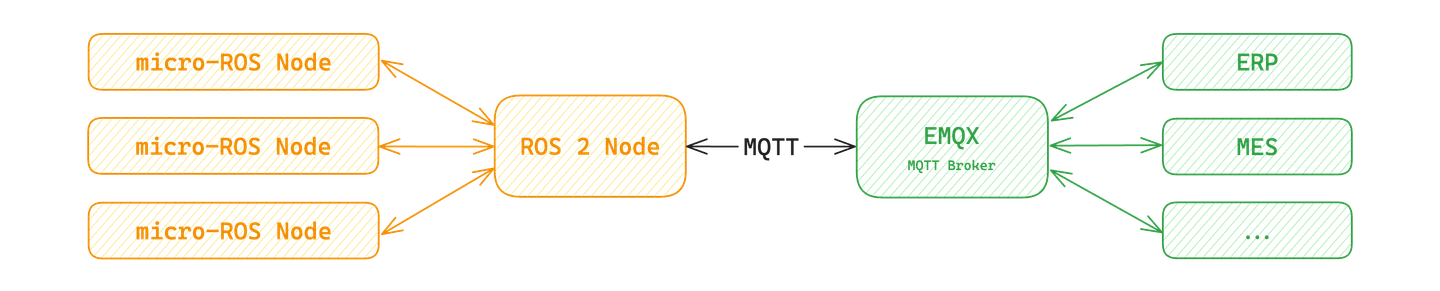
这是一个典型的 micro-ROS 的应用场景:在一个包含多个机器人的系统中,一个主控制节点运行 ROS 2,负责高级任务调度和决策,而每个机器人各自运行一个 micro-ROS 节点,负责执行更低级别的任务,例如与传感器直接通信,以及驱动运动部件。
我们可以在本地直接操作主控制节点,但更多时候我们希望可以远程管理这个机器人系统。
例如在工业制造中,我们可以让运行 ROS 2 的主节点收集网络中所有 micro-ROS 节点的生产数据并传输至 MES 系统,用于生产工艺改进和设备故障预测等目的;也可以进一步结合 ERP 系统,根据订单、库存等信息生成新的生产计划和任务,然后远程下发给 ROS 2 节点,由 ROS 2 节点拆解为具体的子任务并分发给有不同职责的 micro-ROS 节点执行。
轻量、可靠且易于扩展的 MQTT,通常是连接 ROS 2 节点和 MES、ERP 系统的最佳选择。
示例介绍
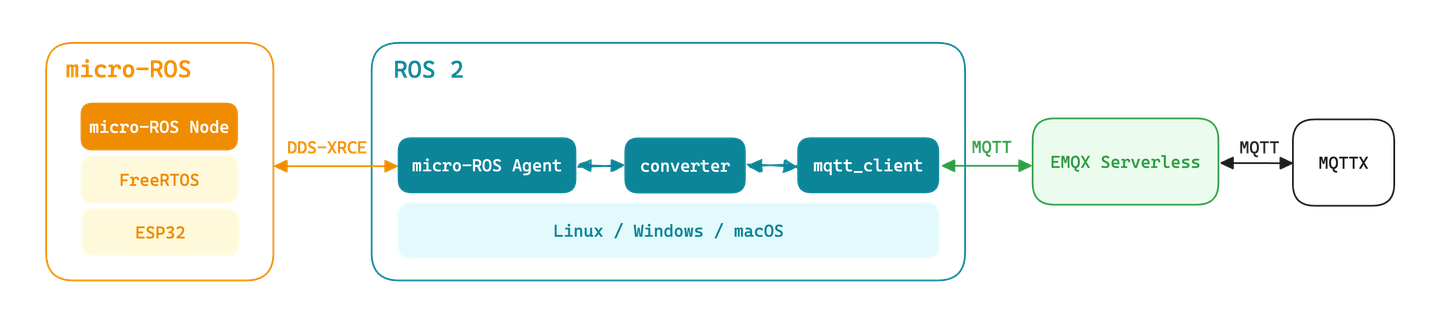
本文将通过一个简单的 Demo 来展示如何从零开始部署一个由 ROS 2 节点和 micro-ROS 节点组成的系统,并通过 MQTT 客户端工具 MQTTX 接收来自 micro-ROS 节点的 LED 色调、亮度等信息,以及向 micro-ROS 节点发送 MQTT 消息使其更改 LED 色调、饱和度和亮度。
我们将使用一块 ESP32-S3 开发板运行 micro-ROS 节点,底层的 RTOS 为 FreeRTOS。micro-ROS 节点与 ROS 2 节点之间通过 micro-ROS Agent 交换消息。
在本示例中,ROS 2 主节点的职责被大幅简化。它不负责拆解复杂任务,甚至也不负责实现 DDS 消息与 MQTT 消息之间的转换,而是借助了另一个 ROS 2 节点 mqtt_client 来实现 ROS 和 MQTT 之间的双向桥接。ROS 2 主节点仅仅实现了 DDS 消息在我们的自定义格式与 JSON 字符串之间的转换。因此这个 ROS 2 主节点被命名为 converter。简化职责的好处是降低了示例代码的复杂度,我们可以更加专注在整个流程上。
最后,我们还需要一个 MQTT 服务器来为 ROS 2 节点与 MQTTX 客户端提供消息服务,这里我们选择 MQTT 平台 EMQX 的 Serverless 版本。EMQX Serverless 提供了每月 100 万连接分钟的免费额度,因此非常适合用于验证这类小型 Demo。
micro-ROS 节点和 ROS 2 节点的示例代码已经上传至 GitHub:https://github.com/emqx/bootcamp。
硬件准备
为了运行本示例,我们需要准备以下硬件:
- 一块集成了 ESP32 系列芯片的开发板(ESP32、ESP32-C3、ESP32-S3 均可,本文基于 ESP32-S3 进行演示)。
- 一个板载的由 WS2812 系列芯片驱动的 RGB LED 光源。
关于如何驱动此 LED,可参阅我们的另一篇博客:MQTT & FreeRTOS:打造你的远程控制实时应用。
如果你的开发板上没有这样的 LED,你可以外接一个 LED 模块,或者稍后通过 Enable LED 配置项禁用示例中的 LED 代码。
软件准备
软件方面,EMQX Serverless 和 MQTTX 在简单部署后即可运行,本示例所需的 ROS 2 节点与 micro-ROS 节点则以源码形式提供,所以我们需要安装对应的构建系统以构建出最终可运行的节点。
部署 EMQX Serverless
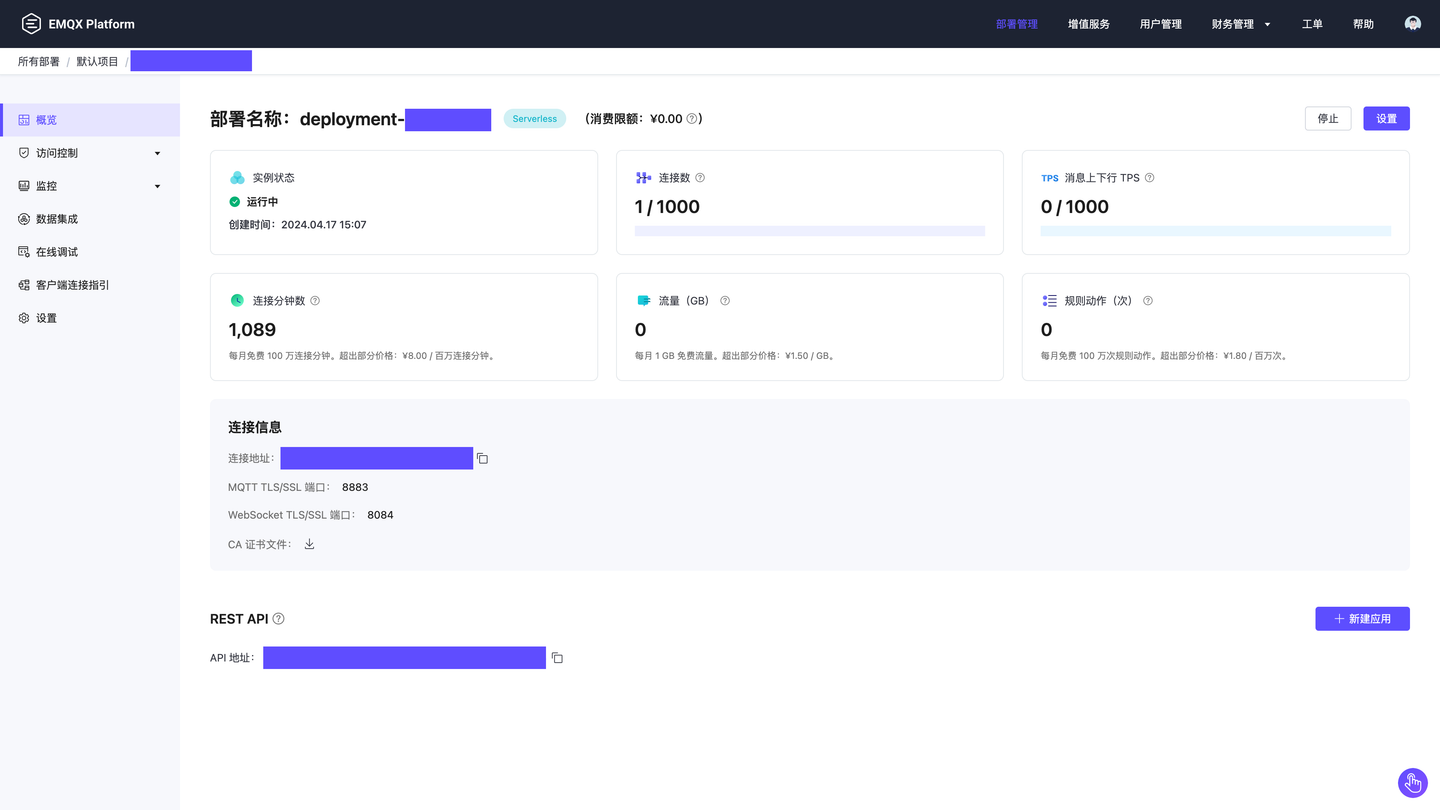
在 EMQ 官网 创建账户后,就可以快速部署一个免费的 EMQX Serverless 实例。
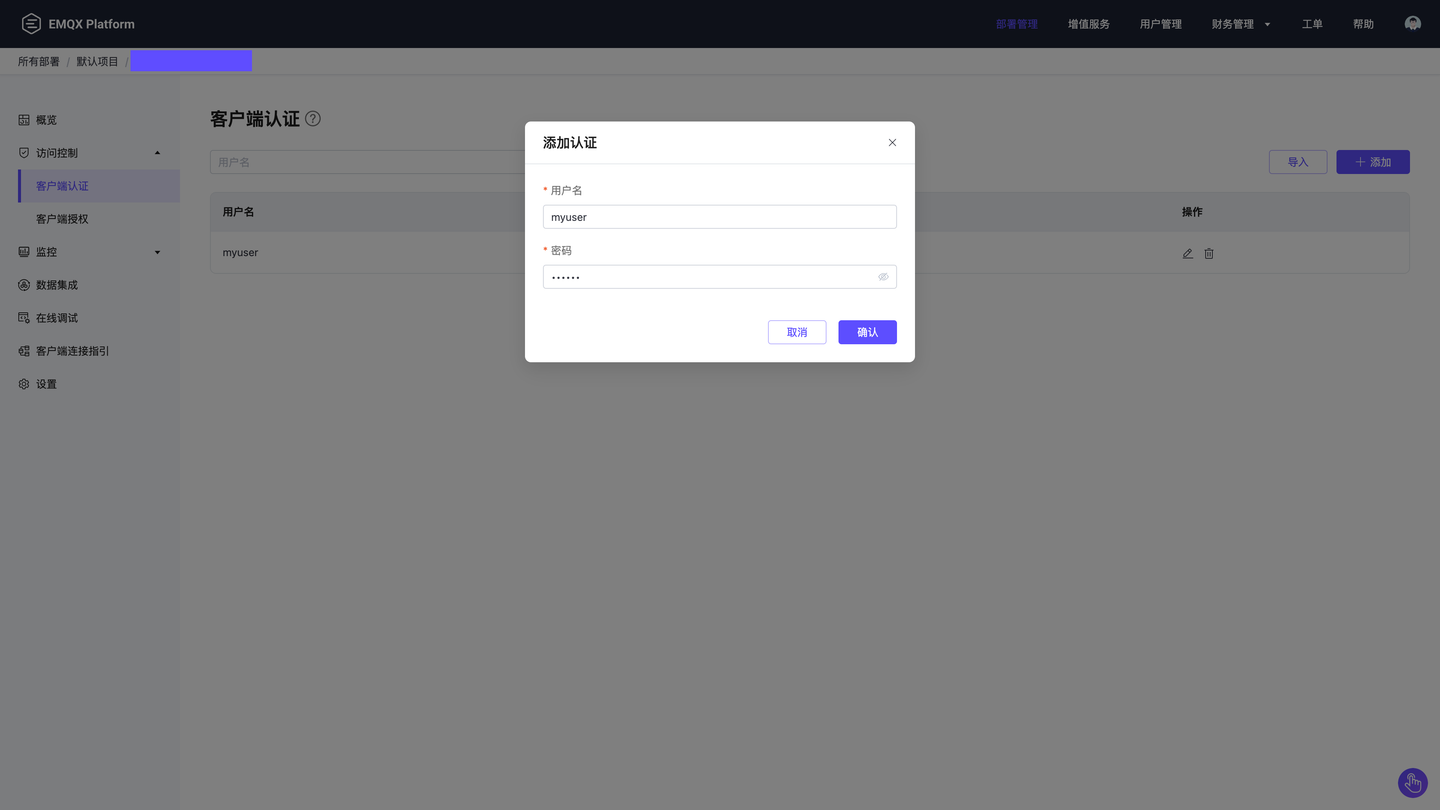
EMQX Serverless 强制启用 TLS 与用户名密码认证以提供最佳的安全性,所以我们还需要前往认证页面为客户端添加认证信息。
安装 MQTTX
MQTTX 是一个同时支持 MQTT 3.1.1 & 5.0 的客户端工具,它拥有非常直观的用户界面,我们可以轻松地建立多个 MQTT 连接,并测试 MQTT 消息的发布订阅。
本文基于 MQTTX 的桌面版进行演示,当然你也可以使用 MQTTX 的命令行版本,在 MQTTX 官网 下载适合您平台的包安装即可。
安装 ROS 2 与 micro-ROS 构建系统
安装 ROS 2 Humble 构建系统
本示例使用的 ROS 2 版本为 Humble,按照 ROS 2 官网文档 列出的步骤完成安装即可。如果 ROS 2 没有为你当前使用的操作系统提供二进制包,那么你可以尝试从源码构建,或者像我一样在虚拟机中安装。
设置 ROS 环境
在安装完成后,我们需要运行以下命令设置 ROS 环境才能正常使用 ROS:
source /opt/ros/humble/setup.sh
/opt/ros/${ROS_DISTRO} 是以二进制包安装 ROS 时的默认安装目录。在本示例中,这个目录就是 /opt/ros/humble。
为了更轻松地设置 ROS 环境,我们可以为这个命令设置一个别名,将以下命令添加到 Shell 配置文件中(例如 ~/.bashrc):
alias get_ros='source /opt/ros/humble/setup.sh'
之后我们就可以在新的终端中使用 get_ros 命令来设置 ROS 环境了。
安装 micro-ROS Agent
micro-ROS Agent 是一个包装了 Micro XRCE-DDS Agent 的 ROS 2 节点。此节点将用来充当 DDS 网络和 micro-ROS 节点之间的服务器。
我们可以直接使用 Docker 来运行 micro-ROS Agent,也可以手动从源码构建运行,推荐使用前者。
通过 Docker 运行 micro-ROS Agent
运行以下命令即可:
docker run -it --rm --net=host microros/micro-ros-agent:humble udp4 --port 8888 -v6
这将启动一个 micro-ROS Agent 监听端口 8888 上的 UDP 消息,-v6 表示日志等级。
micro-ROS Agent 还可以使用 TCP 或者串口传输进行通信,详细的参数设置可参考 eProsima Micro XRCE-DDS Agent。
手动构建安装 micro-ROS Agent
前置条件:
- 安装 ROS 2 Humble 构建系统。
- 安装 micro_ros_setup 软件包。
我们已经完成了第一个前置条件,现在需要完成第二个前置条件。micro_ros_setup 是一个用于为不同嵌入式平台构建 micro-ROS 应用程序的 ROS 2 包,这里我们主要将用到它的另一项功能,即构建 micro-ROS Agent。
安装 micro_ros_setup 软件包的步骤如下:
-
打开一个新的终端。
-
依次运行以下命令:
# 设置 ROS 2 环境 get_ros # 创建一个新的 ROS 2 工作区 mkdir ~/microros_ws cd ~/microros_ws git clone -b $ROS_DISTRO https://github.com/micro-ROS/micro_ros_setup.git src/micro_ros_setup # 更新并获取依赖 sudo apt update sudo rosdep init rosdep update rosdep install --from-paths src --ignore-src -y # 安装 pip sudo apt-get install python3-pip # 构建 micro_ros_setup 包并设置环境 colcon build source install/local_setup.bash
如果你在运行 rosdep update 的过程中遇到了 time out 问题,可以尝试在终端中依次执行以下命令后,再从 sudo rosdep init 开始:
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
现在,让我们来构建 micro-ROS Agent:
-
保持在
~/microros_ws工作区。 -
依次运行以下命令:
# 下载 micro-ROS Agent 包 ros2 run micro_ros_setup create_agent_ws.sh # 构建 Agent 包并完成相关的环境设置 ros2 run micro_ros_setup build_agent.sh source install/local_setup.bash
安装完成后,运行以下命令启动代理:
ros2 run micro_ros_agent micro_ros_agent udp4 --port 8888 -v6
对于 ESP32、STM32 等硬件平台,在安装 micro_ros_setup 软件包后,我们可以继续使用这个包提供的 build_firmware.sh 等脚本构建或配置平台所需的 micro-ROS 应用程序。
但由于 micro_ros_setup 目前尚未支持 ESP32-S3 型号,所以本示例中我们将采用另一种方式来构建 micro-ROS 应用程序:micro-ROS 提供了一些适用于特定平台的独立模块,比如它为 ESP32 的官方开发框架 ESP-IDF 提供了 micro_ros_espidf_component 组件,我们可以直接在已创建的 ESP-IDF 项目中集成该组件,以实现 micro-ROS 应用的构建。
安装 ESP-IDF
参考 ESP-IDF 官方文档,依次执行与你操作系统对应的安装步骤即可。
按照文档所示步骤完成安装后,我们将获得一个命令别名 get_idf,与前文中的 get_ros 类似,它被用来设置 ESP-IDF 所需的环境变量。
安装 USB 转串口驱动
EPS32 开发板的串口通常经由 USB 转串口芯片以 USB 方式连接到 PC,所以在运行 idf.py flash 命令以串口方式烧录固件之前,我们还需要确保正确地安装了相关驱动。
在本示例中,我使用的 ESP32-S3 开发板集成的是 CH343 这个 USB 转高速异步串口芯片,对应 Linux 系统的驱动下载地址为:https://github.com/WCHSoftGroup/ch343ser_linux。此驱动同样适配 CH342、CH344 等芯片。
驱动的安装步骤如下:
git clone <https://github.com/WCHSoftGroup/ch343ser_linux.git>
cd ch343ser_linux/driver
# 编译驱动,如果成功你将在当前目录下看到 ch343.ko 模块文件
make
# 安装驱动
sudo make install
安装 micro_ros_espidf_component 组件的依赖项
我们还需要为 micro_ros_espidf_component 组件安装一些依赖项,才能使其正确构建 micro-ROS 应用,操作步骤如下:
-
打开一个新的终端,并设置 ESP-IDF 环境:
get_idf -
安装依赖项:
pip3 install catkin_pkg lark-parser colcon-common-extensions
构建示例
获取示例代码:
git clone <https://github.com/emqx/bootcamp.git> /tmp
示例代码包含以下三个目录:
ros2_demo,包含了converter这个 ROS 2 主节点的代码。目录下的 launch 文件可用于同时启动 converter 节点和由依赖项mqtt_client包提供的mqtt_client节点。microros_demo,包含了在 ESP32 上运行的 micro-ROS 节点代码。demo_interfaces,包含了一个自定义消息格式 Hsb,由 hue、saturation、brightness 三个字段组成。该消息在 micro-ROS 节点与convertor节点之间传递。
构建 ros2_demo
首先,我们需要在 ROS 2 工作区完成 ros2_demo 的构建,请依次执行以下步骤:
-
打开一个新的终端,创建
ros2_ws工作区,并将ros2_demo和demo_interfaces拷贝至此工作区:mkdir -p ~/ros2_ws/src cd ~/ros2_ws get_ros cp -r /tmp/bootcamp/mqtt-and-ros/ros2_demo ~/ros2_ws/src cp -r /tmp/bootcamp/mqtt-and-ros/demo_interfaces ~/ros2_ws/src -
安装依赖项:
rosdep install --from-paths src --ignore-src --rosdistro humble -yros2_demo和demo_interfaces的依赖项在各自根目录下的package.xml中列出。 -
修改默认配置:
vim src/ros2_demo/config/params.xml这个
params.xml中包含了converter节点和mqtt_client节点的默认配置。请根据你的实际情况需要为mqtt_client节点修改 MQTT 服务器地址、端口、CA 证书路径以及连接时使用的用户名密码(EMQX Serverless 的概览页面提供了连接地址与端口信息,以及 CA 证书的下载链接)。其余配置用于主题桥接,保持默认即可:
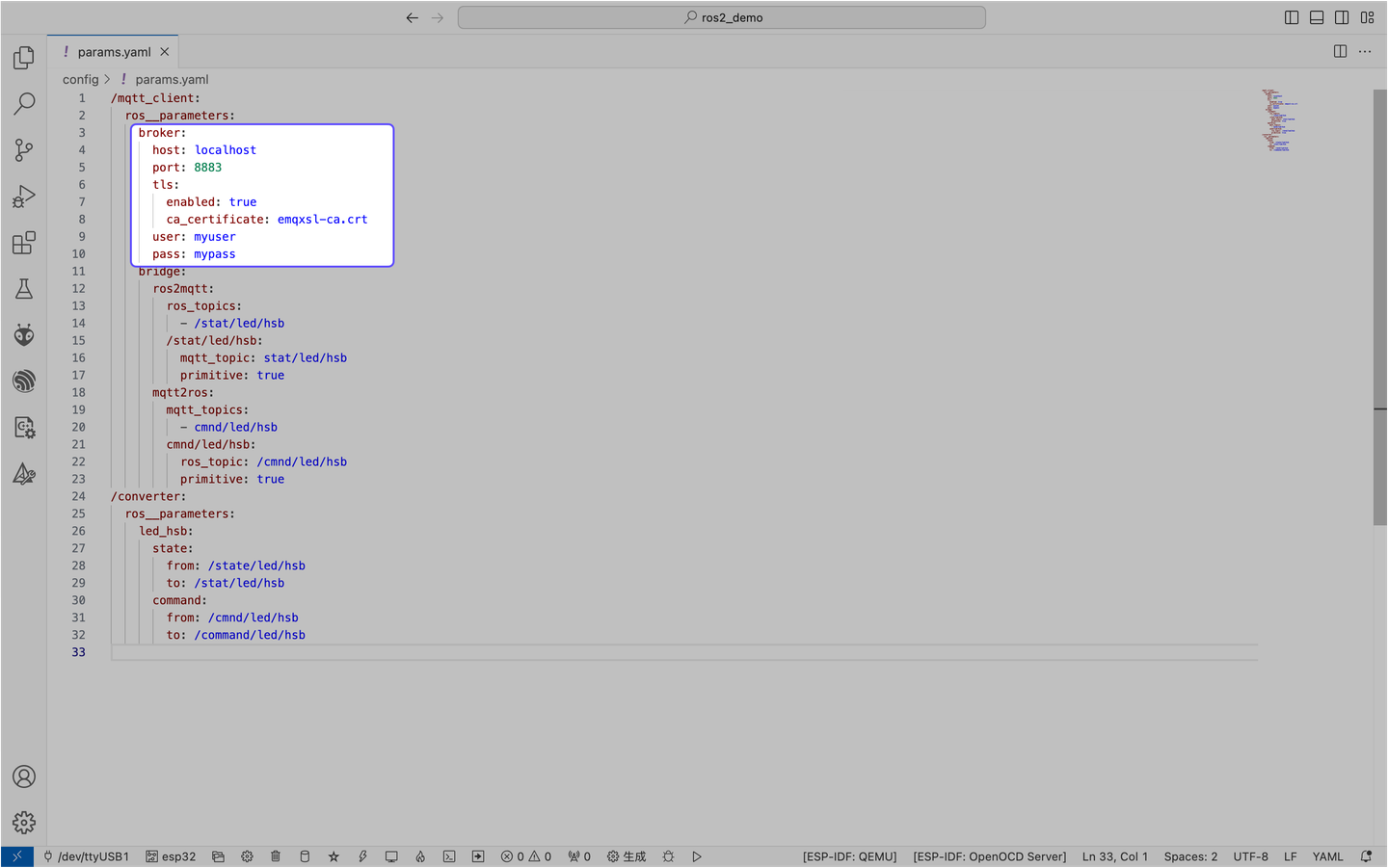
默认配置下
mqtt_client节点将来自converter节点的 DDS 消息转换成 MQTT 消息并发布到 MQTT 主题stat/led/hsb;从 MQTT 主题cmnd/led/hsb接收指令转换成 DDS 消息转发给converter节点: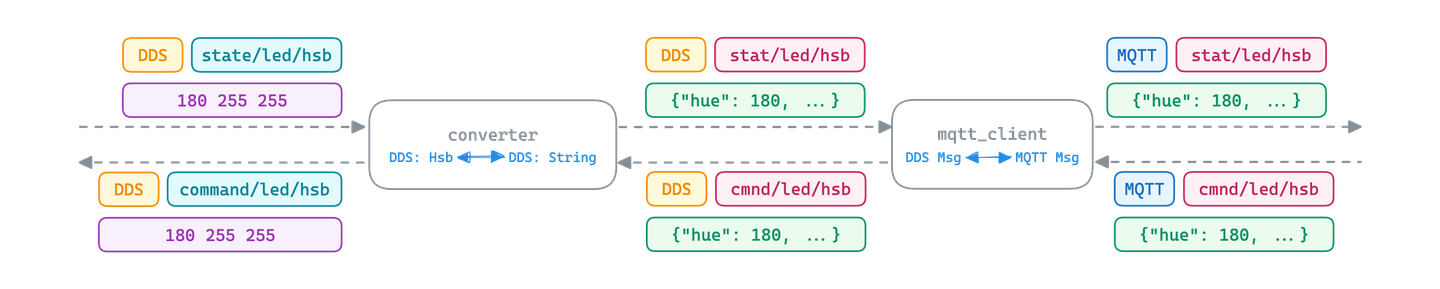
-
构建
ros2_demo以及它依赖的demo_interfaces:colcon build --packages-up-to ros2_demo -
使用启动文件同时启动
converter节点与mqtt_client节点。我们在src目录下修改的params.yaml会在构建时被拷贝至install目录下,节点使用的配置默认从install目录下的params.yaml中加载,当然你也可以指定其他路径下的参数文件,例如params_files=<path to params.yaml>:source install/local_setup.bash ros2 launch ros2_demo launch.xml # or # ros2 launch ros2_demo launch.xml params_file:=<path to params.yaml>
构建 microros_demo
-
打开一个新的终端,注意不要执行
get_ros或其他任何setup.sh脚本来设置 ROS 环境。 -
为了避免和 ROS 工作区混淆,推荐创建一个新的目录,并设置 ESP-IDF 环境:
mkdir -p ~/esp_idf_ws cd ~/esp_idf_ws get_idf -
将
microros_demo代码拷贝至当前目录:cp -r /tmp/bootcamp/mqtt-and-ros/microros_demo ./ -
我们准备将
micro_ros_espidf_comonent作为 ESP-IDF 的组件使用,但microros_demo默认并未包含该组件,我们需要手动将该组件克隆至components目录:cd microros_demo git clone -b humble https://github.com/micro-ROS/micro_ros_espidf_component.git components/micro_ros_espidf_component -
microros_demo同样依赖demo_interfaces来使用自定义消息 Hsb,所以我们还需要将demo_interfaces拷贝至micro_ros_espidf_component组件下的extra_packages目录:cp -r /tmp/bootcamp/mqtt-and-ros/demo_interfaces components/micro_ros_espidf_component/extra_packages -
设置目标芯片:
idf.py set-target esp32s3
如果 set-target 命令执行失败,需要手动清除相关文件才能再次执行:
rm -rf build
cd components/micro_ros_espidf_component;make -f libmicroros.mk clean;cd ../../
idf.py set-target esp32s3
-
修改配置:
idf.py menuconfig在本示例中,我们只关心
micro-ROS example-app settings和micro-ROS Settings这两个子菜单下的配置。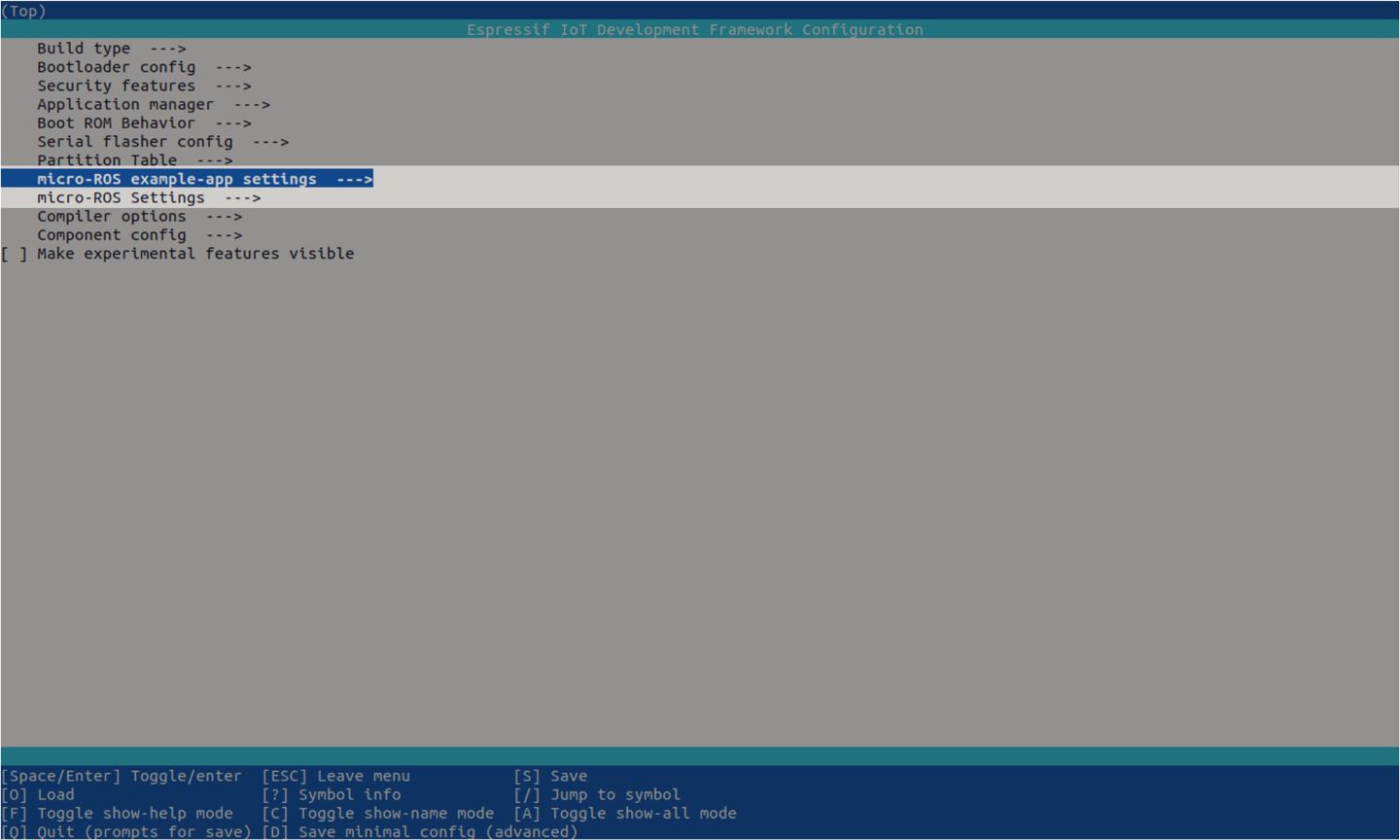
micro-ROS example-app settings中的配置在microros_demo/Kconfig.projbuild中定义,它提供了以下配置项:Node name of the micro-ROS app:micro-ROS 的节点名称,默认为microros_demo。Stack the micro-ROS app (Bytes):为 micro-ROS 任务分配的堆栈大小,默认为 16000 字节。Priority of the micro-ROS app:micro-ROS 任务的优先级,默认为 5。Enable LED:是否启用 LED,默认启用。如果你没有合适的 LED 硬件,那么可以通过此选项禁用 LED 的相关代码。禁用后示例将通过在串口打印相应内容来代替操作实际的硬件。LED Strip GPIO Number:与 LED 相连的 GPIO 引脚,默认为 38。LED State Message Interval:micro-ROS 节点发送 LED 状态消息的时间间隔,默认为 5000 毫秒。
micro-ROS Settings中的配置在components/micro_ros_espidf_component/Kconfig.projbuild中定义,它提供了以下配置项:micro-ROS middleware:micro-ROS 节点使用的 DDS 实现,本示例中我们使用默认的micro-ROS over eProsima Micro XRCE-DDS即可。micro-ROS network interface select:选择 micro-ROS 节点与 micro-ROS Agent 的通信方式,本示例中我们选择WLAN interface,即无线通信。WiFi Configuration:配置你的 Wi-Fi SSID 和密码。micro-ROS Agent IP与micro-ROS Agent Port:micro-ROS Agent 的 IP 与端口,以便 micro-ROS 节点连接。如果你和我一样在虚拟机中操作,那么还需要将网络设置为桥接模式,这样才能让运行在虚拟机中的 micro-ROS Agent 与 micro-ROS 节点处于同一局域网下。
-
构建
microros_demo:idf.py build -
idf.py flash命令不建议以 root 身份执行,为了正确烧写固件,我们可以将串口设备文件的所有者修改为当前用户:sudo chown $USER /dev/ttyACM0/dev/ttyACM0需要替换成你串口设备的实际文件名,例如/dev/ttyUSB0。 -
烧写固件:
idf.py -p /dev/ttyACM0 flash
运行示例
如果你没有退出 micro-ROS Agent 和 ros2_demo,那么在 microros_demo 的固件被烧写到 ESP32 开发板之后,示例就已经完整地运行起来了。
为了更加直观地展示启动步骤,这里我们还是从头来运行这个示例:
-
运行 micro-ROS Agent。
-
打开一个新的终端。
-
依次运行以下命令:
get_ros cd ~/microros_ws source install/local_setup.bash ros2 run micro_ros_agent micro_ros_agent udp4 --port 8888 -v6
-
-
运行
ros2_demo中的converter与mqtt_client节点。-
打开一个新的终端。
-
依次运行以下命令:
get_ros cd ~/ros2_ws source install/local_setup.bash ros2 launch ros2_demo launch.xml
-
-
运行
microros_demo节点。-
打开一个新的终端。
-
依次运行以下命令:
get_idf cd ~/esp_idf_ws/microros_demo idf.py monitoridf.py monitor将启动一个串口监视器来查看 ESP32 的输出。默认情况下,此命令还将复位目标芯片,所以我们会看到microros_demo从头开始运行。如果一切顺利,你将在控制台看到以下输出:... I (1784) esp_netif_handlers: sta ip: 192.168.0.67, mask: 255.255.252.0, gw: 192.168.0.100 I (1784) wifi_station_netif: got ip:192.168.0.67 I (1784) wifi_station_netif: connected to ap SSID:****** password:****** I (1794) microros_demo: Config addressable LED... I (1794) gpio: GPIO[38]| InputEn: 0| OutputEn: 1| OpenDrain: 0| Pullup: 1| Pulldown: 0| Intr:0 ... I (1904) microros_demo: Created publisher state/led/hsb. I (1904) microros_demo: Created timer with timeout 5000 ms. I (1974) microros_demo: Created subscriber command/led/hsb. ...
-
-
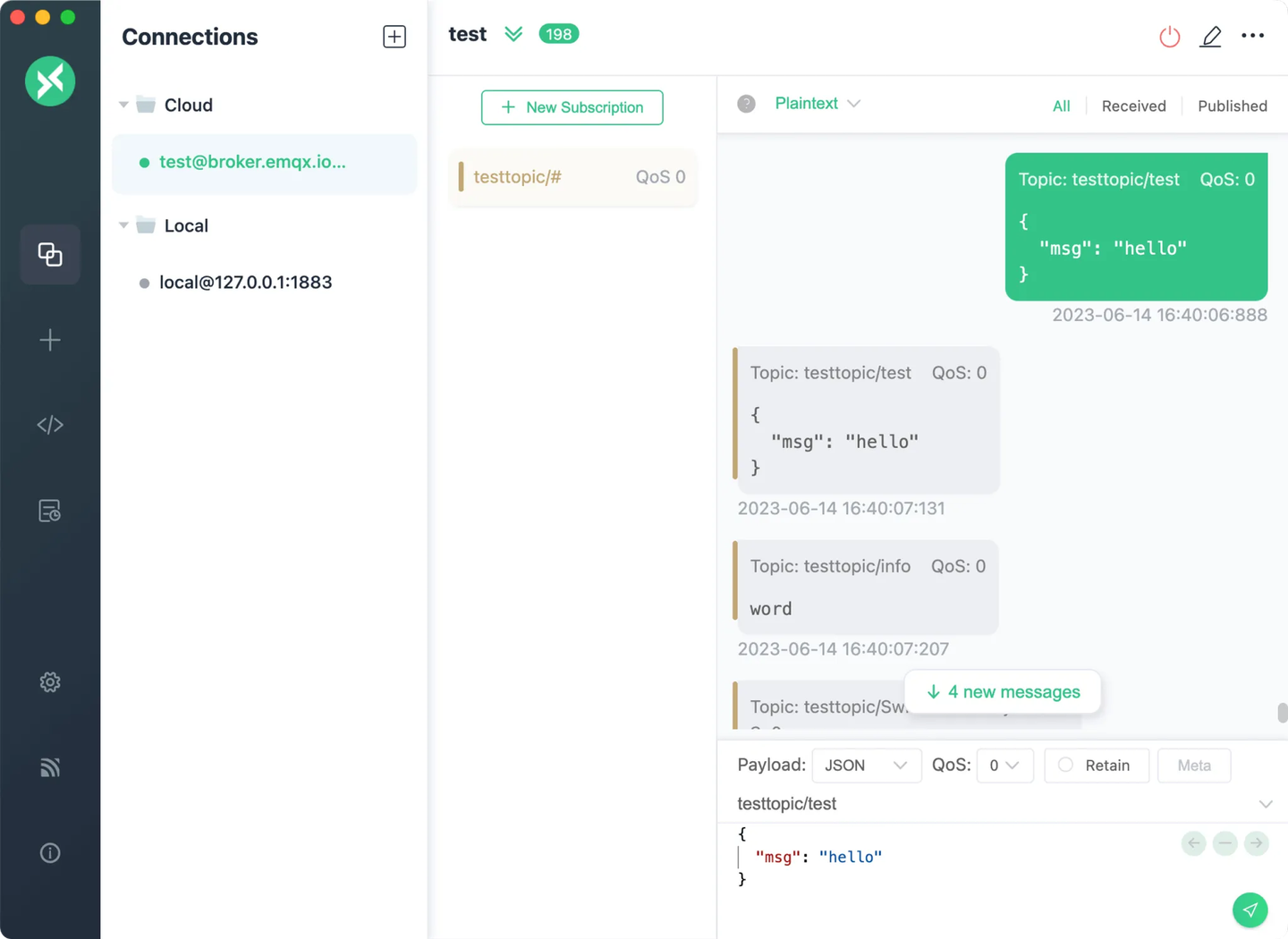
打开 MQTTX,创建一个连接到 EMQX Serverless 实例的客户端连接,并订阅主题 stat/led/hsb。你将看到 MQTTX 每隔 5 秒收到一条新的消息。这些消息来自运行在 ESP32-S3 上的 micro-ROS 节点,经由 micro-ROS Agent、
converter和mqtt_client发布到 EMQX Serverless,最终由 EMQX Serverless 转发给 MQTTX: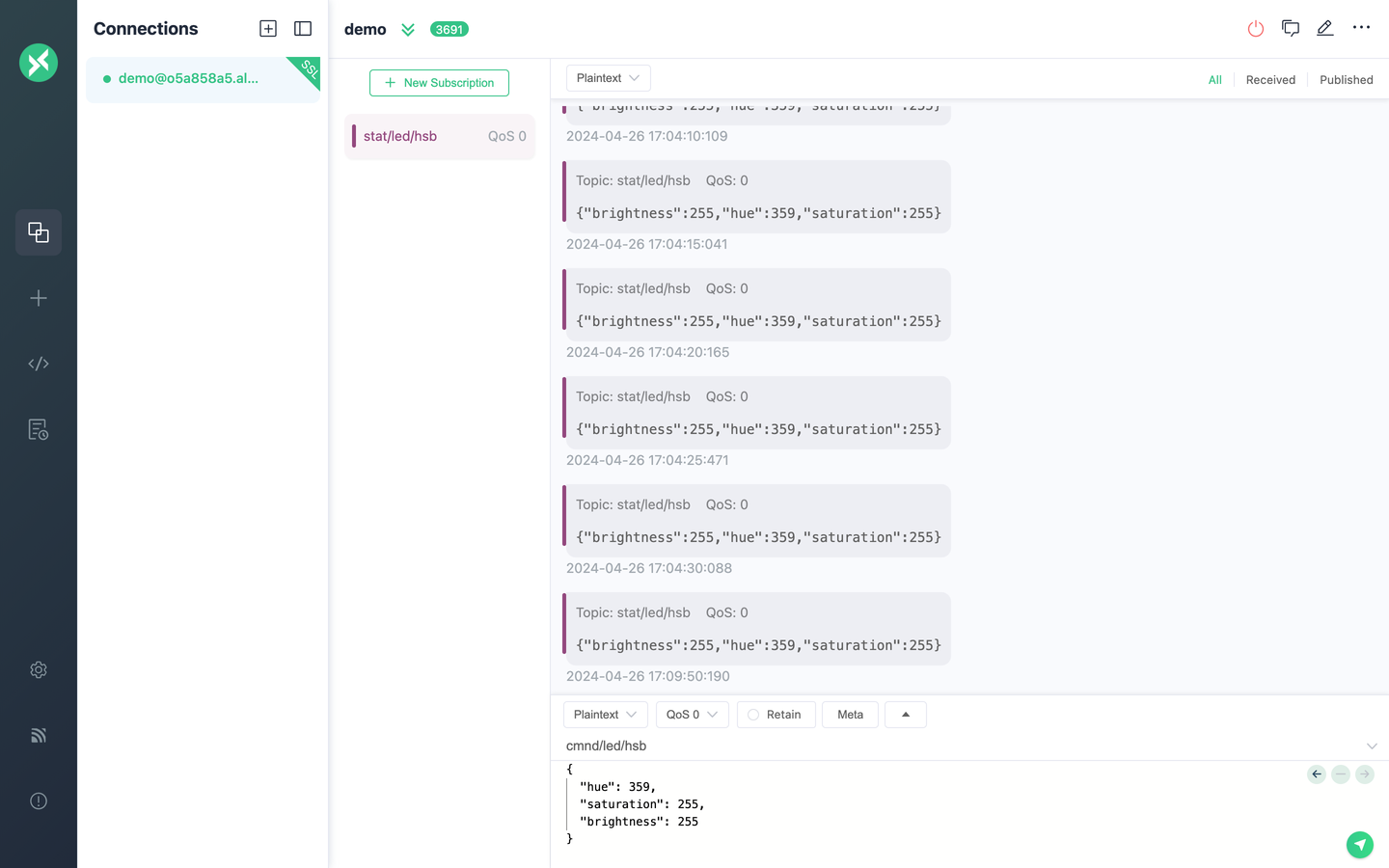
你还可以向主题
cmnd/led/hsb发布指令,来更改 ESP32 开发板上 LED 的色调、饱和度和亮度: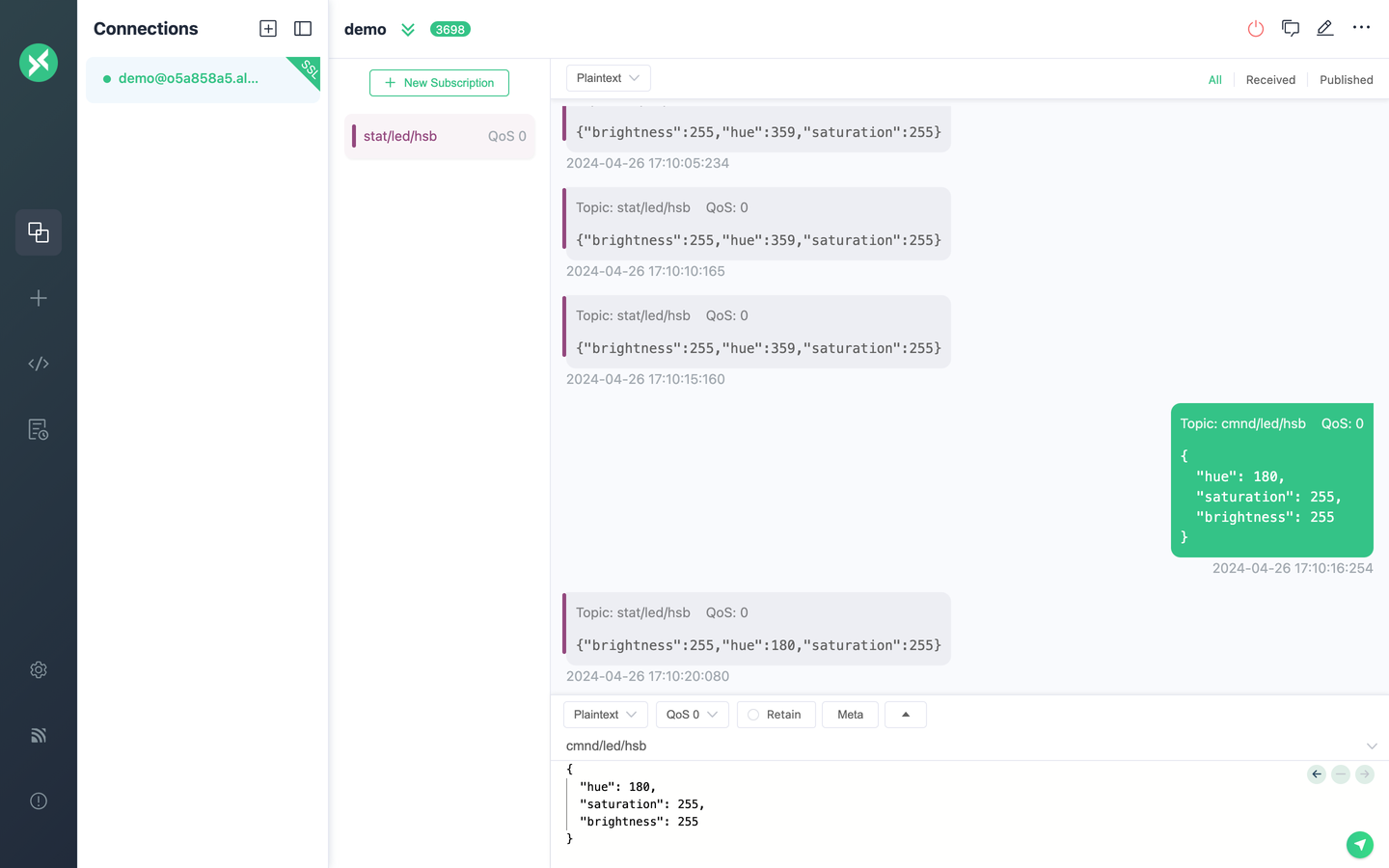
结语
正如你所看到的,我们成功地在 FreeRTOS 中运行了 micro-ROS 并与 ROS 2 节点无缝集成,这使我们可以利用 ROS 丰富的软件库和工具集可以为复杂应用的开发提供有力的支持。最终通过 MQTT 协议与 EMQX 的集成,则展示了通过云端监管大量 ROS 应用,以及将 ROS 系统与其他非 ROS 系统例如 MES、ERP 集成的可能性。
本示例仅展示了一些基本功能,micro-ROS 和 EMQX 的潜力远远不止于此。我们相信,通过 EMQX 将 micro-ROS 的通信能力拓展到互联网层面,实现更广泛的设备互联,将使 micro-ROS 在机器人控制领域发挥更重要的作用。
原文地址:https://blog.csdn.net/emqx_broker/article/details/140491528
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!