为什么使用 atan2(sin(z), cos(z)) 进行角度归一化?
atan2 方法返回 -π 到 π 之间的值,代表点 (x, y) 相对于正X轴的偏移角度。这个角度是逆时针测量的,以弧度为单位。关于 atan2 函数为什么能够用于角度归一化,并且为什么 atan2(sin(z), cos(z)) 返回的角度等同于原始角度 z 的归一化值,让我们详细探讨一下:
为什么使用 atan2(sin(z), cos(z)) 进行归一化?
- 周期性:
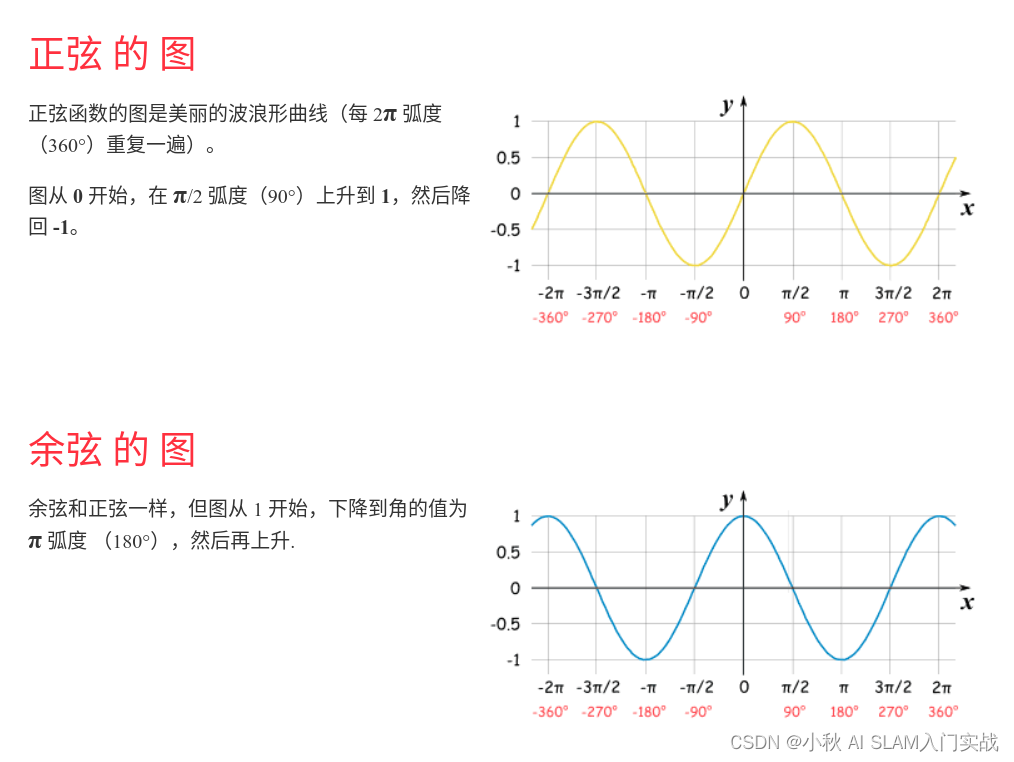
sin(z)和cos(z)函数都是周期性的,它们的值对于z和z + 2πk(其中k是任意整数)是相同的。这意味着无论z的初始值如何,sin(z)和cos(z)总是将其映射回一个周期内。
- 单位圆的表示:
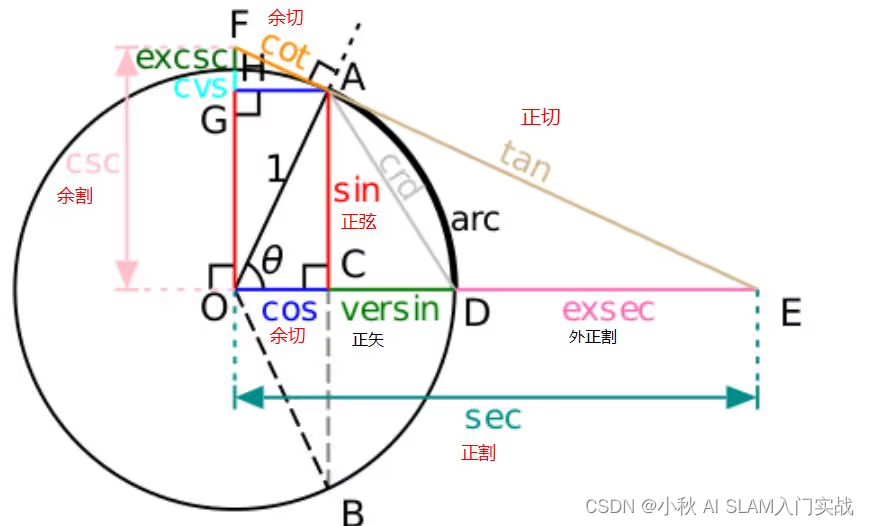
- 点
(cos(z), sin(z))表示在单位圆上的一个点,其中z是从正X轴到这个点的逆时针角度。 - 因此,无论
z的原始值是多少,点(cos(z), sin(z))都是z对应的单位圆上的相同点。
- 点
atan2的作用:atan2函数计算从正X轴到点(x, y)的逆时针角度。当使用(cos(z), sin(z))作为输入时,它实际上是在计算从正X轴到单位圆上z角度对应的点的角度。- 因此,
atan2(sin(z), cos(z))返回的就是z对应的角度,但被归一化到了-π到π的范围内。
为什么归一化后的角度等于原始角度?
- 假设
z已经在-π到π的范围内,则atan2(sin(z), cos(z))直接返回z。 - 如果
z不在这个范围内,比如z = π + δ(其中δ是一个小于π的正数),那么sin(z)和cos(z)的值将与sin(π + δ)和cos(π + δ)相同,即sin(δ)和-cos(δ)。在这种情况下,atan2将计算出-π + δ,这是π + δ的归一化值。
总结来说,atan2(sin(z), cos(z)) 之所以能够正确归一化角度,是因为它结合了三角函数的周期性和 atan2 函数计算点在单位圆上角度的能力,从而能够将任意角度 z 映射到 -π 到 π 的标准
范围内。这种方法不仅适用于将角度归一化到一个标准范围,而且确保了原始角度的方向和大小在单位圆上得到正确的表示和计算。
原文地址:https://blog.csdn.net/qq_21950671/article/details/135620720
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!