基于AI的3D场景重建技术新突破!破局自动驾驶端到端仿真
场景的保真度,对于自动驾驶仿真和合成数据生成至关重要,场景重建保真度不足,将极大地制约高阶自动驾驶系统的训练效果。同时,在用于训练大模型和具身智能的合成数据领域,同样对低成本的高保真场景有巨大的需求。
在此背景下,凭借多年的技术积累,51WORLD旗下AI合成数据及仿真平台公司51Sim基于AI算法,将3D Gaussian Splatting与传统图形渲染技术创新融合,不仅攻克了3DGS技术泛化能力不足等“卡脖子”难题,实现了在拟真度方面的突破性进展,还显著提高了自动驾驶系统的训练质量及仿真的置信度。
▍“端到端”自动驾驶对高保真场景需求迫切
目前已量产的智能驾驶,大多数采用的都是模块化架构:将智能驾驶拆分成感知、预测、规划等典型任务,并交给专门的AI模型或模块来处理。由于系统中包含多个模型,因而需要对每个模型都进行专门的训练、优化和迭代。而端到端架构,则是通过一个模型来实现,因此能够更加高效和低成本地聚焦核心功能,这也让端到端解决方案正逐渐成为主流。
端到端方案对于高保真场景的需求更加迫切,由于端到端系统需要能够在各种复杂场景中自如应对,需要将大量标注有自动驾驶行为的视频投入自动驾驶训练。然而传统的3D场景仿真技术因为场景的真实感不足、多样性欠缺和成本高等问题,已无法完整满足端到端落地的需求。
针对这一现状,51Sim创新性地将3D Gaussian Splatting通过AI算法融合到传统图形渲染引擎中,在拟真度方面取得了突破性进展。这项技术重新定义了高保真3D场景的重建标准,通过提升仿真的真实感、弥补了单一技术的不足并大幅降低了场景重建的成本。

▍3D Gaussian Splatting 技术
3D高斯泼溅(3D Gaussian Splatting, 简称3DGS)是用于实时辐射场渲染的3D 高斯分布描述的一种渲染技术,通过将多视角图像表示的三维场景转化为各向异性3D高斯点云表示的场景,并能通过参数优化和密度控制来提高重建质量。
3DGS在渲染速度、图像质量、定位精度等方面呈现出了非常优异的表现,全面补足了NeRF的短板。同时,基于3DGS的重建场景能够1:1复刻在真实智驾上发现的边缘场景(Corner Case),通过动态场景泛化,提升端到端智驾系统应对Corner Case的能力。

3DGS重建场景
尽管3DGS在创建高质量渲染方面表现出色,但在动态场景交互和细节保留方面存在一些局限性。例如,3DGS在处理大规模场景和动态物体时,可能会出现细节缺失、伪影和泛化能力不足的问题。
因此,目前3DGS还难以在复杂的自动驾驶场景中实现高效的落地应用。
▍51Sim融合方案突破3DGS技术局限
针对3DGS在实际应用上的短板,51Sim凭借多年在仿真领域的技术积累,将3DGS通过AI算法驱动与传统图形渲染技术融合,突破了单一技术的局限。
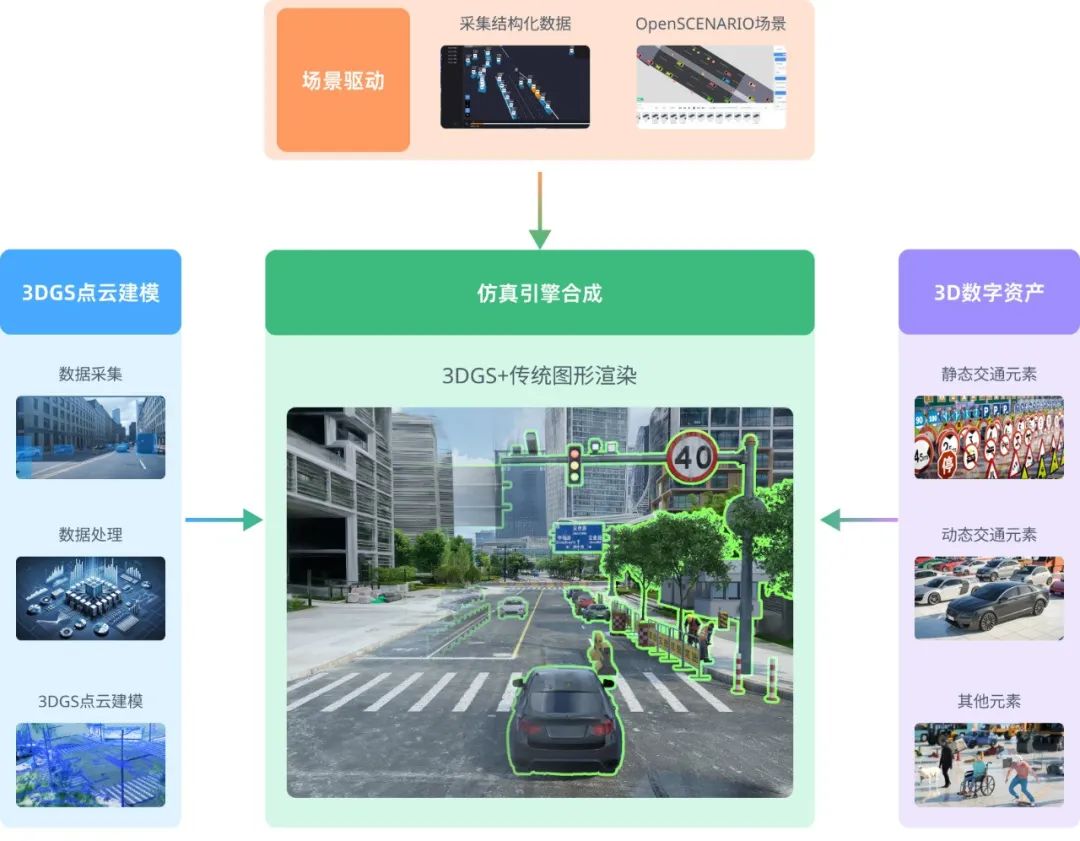
在通过3DGS点云建模的基础上,通过优化的AI融合算法,将静态3DGS场景与51Sim此前积累的静态场景库、动态的交通场景库和各类传感器仿真进行了自然融合,确保了整体场景的连贯性和视觉真实感,并实现了场景丰富度指数级增加。同时,利用先进的全局渲染技术,生成高质量视图,确保多相机视角的一致性和高保真度,实现了逼真的渲染效果。

3DGS融合动态、静态交通要素

融合光照天气
▍应用场景覆盖各类具身/非具身智能领域
51Sim融合方案具有高质量和实时渲染的能力,高保真的模拟场景不仅提高了自动驾驶系统的训练质量,还显著提升了仿真的真实性,使其几乎可以达到肉眼难辨的程度,大幅提升了仿真的置信度,并弥补了3DGS在细节和泛化能力的不足,这也是目前行业内首例真正可用于自动驾驶仿真的3DGS解决方案。
BEV多摄像头视频生成
除自动驾驶领域的应用之外,该方案还能生成高质量合成数据用于视频大模型训练,助力AI大模型公司以提升文生视频的训练效果。

Future
高保真场景重建,将仿真置信度提升到了新的高度,对于端到端自动驾驶的进化与落地具有关键意义。未来,51Sim 将持续迭代3DGS融合技术,为AI训练提供充足的数据燃料,赋能更广泛的行业应用。
原文地址:https://blog.csdn.net/Digital_51WORLD/article/details/140269244
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!