自动驾驶-预测概览
通过生成一条路径来预测一个物体的行为·,在每一个时间段内,为每一辆汽车重新计算预测他们新生成的路径,这些预测路径为规划阶段做出决策提供了必要信息
预测路径有实时性的要求,预测模块能够学习新的行为。我们可以使用多源的数据进行训练,可以是算法随着时间的推移而提升预测能力
有两种基本的预测类型,一种是基于模型的,一种是数据驱动的。预测将称为决策的核心,因为只要你知道该期待什么,就会做出更好的决策
基于模型的方法优点在于直观,结合了我们现有的物理知识以及交通法规还有人类行为
基于车道的预测
apollo提供了一种基于车道序列的方法
预测更关心在不同区域的转换,而不是某个区域内的具体行为
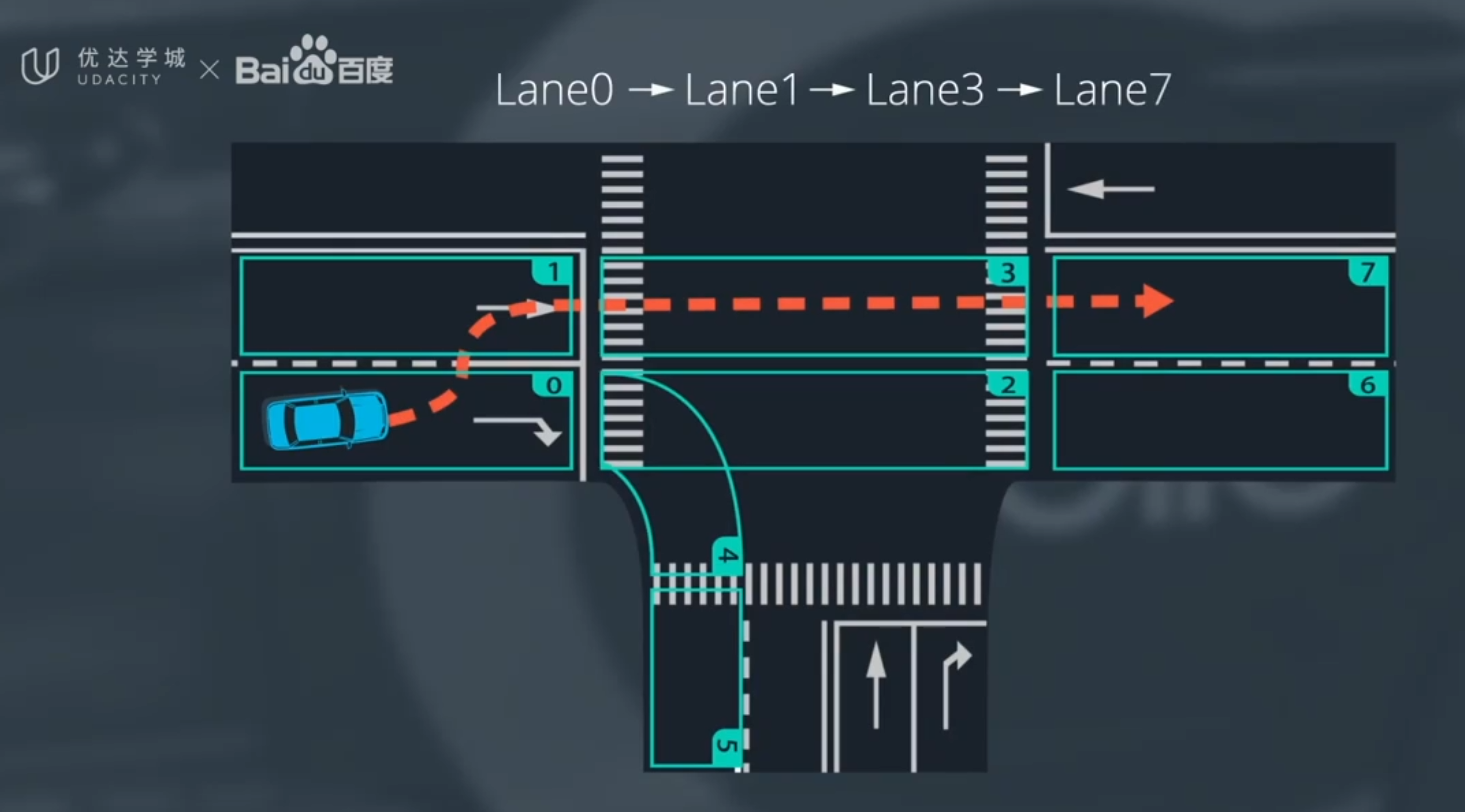
通过观察一个物体的朝向,位置和速度来预测它将会做什么
使用车道序列框架目标是为道路上的物体生成轨迹,这是很复杂的。
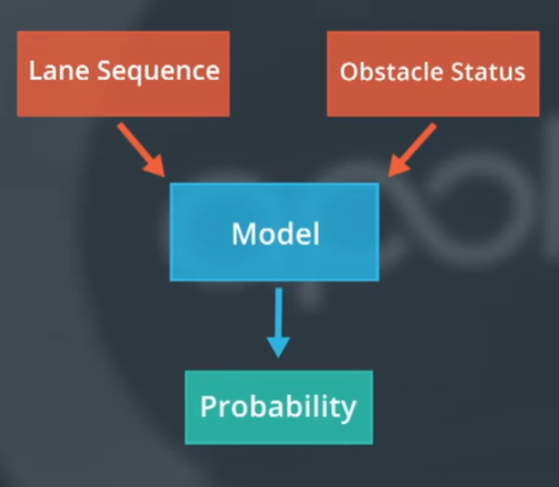
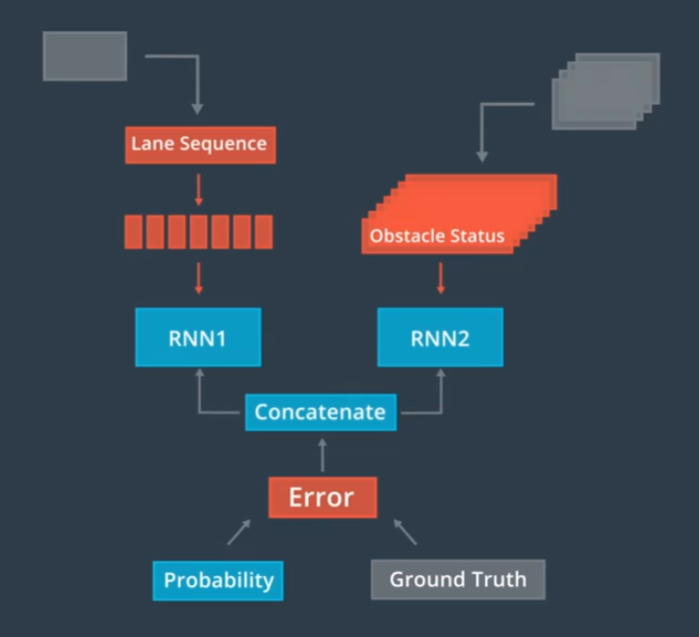
可以将预测问题简化为选择问题,选择车辆最有可能采取的车道顺序,可以通过计算每个车道序列的概率进行选择。 我们需要一个模型,将车辆状态和车道段输入,该模型提供车辆可能采取每个车道序列的概率
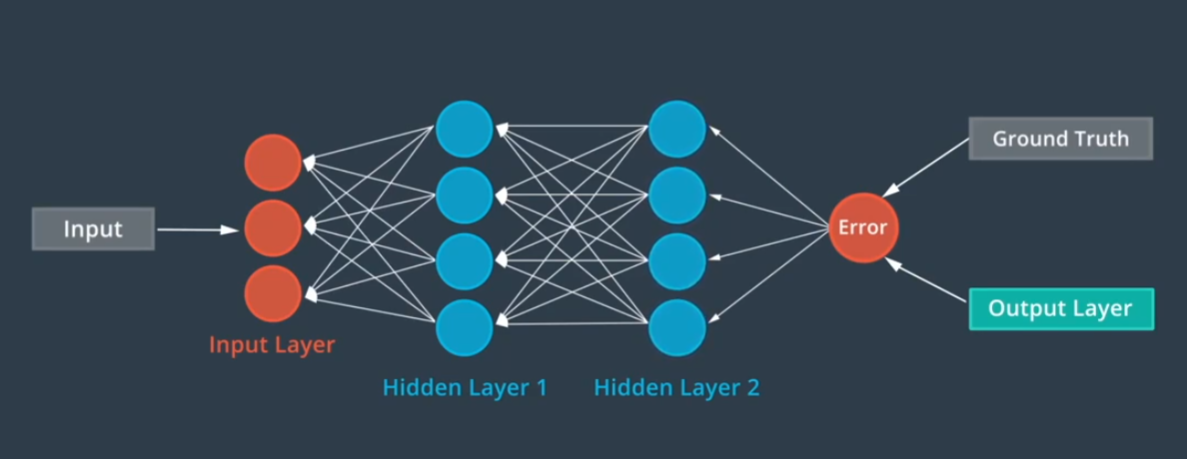
递归神经网络RNN
是一种利用时间序列数据特征的一种预测方法
神经网络的中间层将提取特征,例如轮胎和窗户。 神经网络从数据中学习的方式叫做后向传播
以上简称MLP,MLP从数据序列中提取出高级特征,每个MLP单元将序列的一个元素作为输入,并预测序列的下一个元素作为输出。为了对元素之间的顺序关系建立模型,每个单元之间建立一个额外的连接。意味着每个单元根据原始输入和前一个单元的输出进行预测
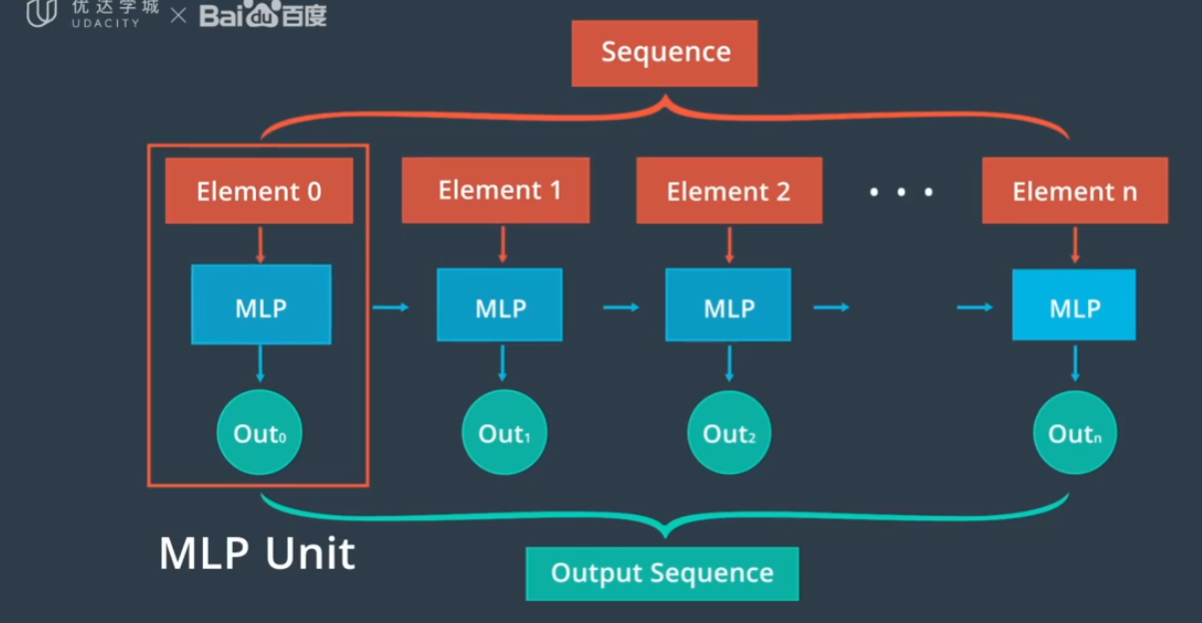
apollo使用RNN建立一个模型来预测车辆的目标车道。
轨迹生成
一旦我们预测到物体的车道序列,就可以预测物体的轨迹。
先通过设置约束条件来去除大部分候选轨迹
使用初始状态和最终状态来拟合一个多项式模型,这种多项式足以进行预测
原文地址:https://blog.csdn.net/qq_36372352/article/details/140575753
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!