【综述】DSP处理器芯片

文章目录
TI DSP
TI C2000系列 控制领域
TI C5000系列 通信领域
TI C6000系列 图像领域
C2000系列
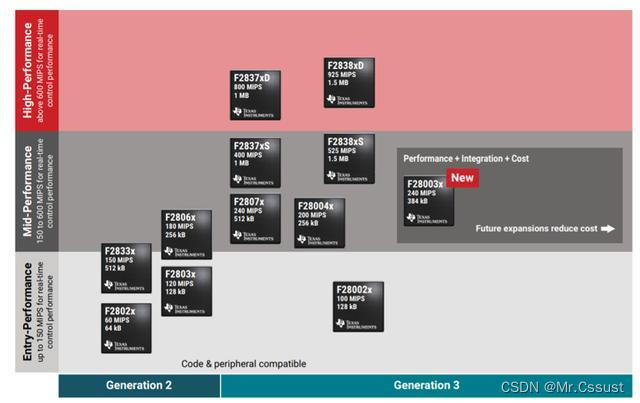
第三代集成了C28浮点DSP内核,采用了65nm工艺(上一代180nm)
第四代正在规划中,将内置C29 DSP内核,性能提高2至3倍
TMS320F28003X

C2000F28003X包括一个120MHz主频的32位C28 浮点DSP,以及一个120MHz主频的CLA。CLA (Control Law Accelerator,控制率加速器)独立于C28x CPU工作,时钟频率与CPU相同,可执行算法以及周期性的计算工作。通过增加平行的处理单元CLA,拓展了C28x CPU的性能。
典型应用
电机控制示例如下:

void PWMA_config(void)
{
P_SW2 |= 0x80;//SFR enable
PWM1 = 0;
PWM1_L = 0;
PWM2 = 0;
PWM2_L = 0;
PWM3 = 0;
PWM3_L = 0;
P1n_push_pull(0x3f);
PWMA_PSCR = 3;// 预分频寄存器, 分频 Fck_cnt = Fck_psc/(PSCR[15:0}+1), 边沿对齐PWM频率 = SYSclk/((PSCR+1)*(AAR+1)), 中央对齐PWM频率 = SYSclk/((PSCR+1)*(AAR+1)*2).
PWMA_DTR = 24;// 死区时间配置, n=0~127: DTR= n T, 0x80 ~(0x80+n), n=0~63: DTR=(64+n)*2T,
//0xc0 ~(0xc0+n), n=0~31: DTR=(32+n)*8T, 0xE0 ~(0xE0+n), n=0~31: DTR=(32+n)*16T,
PWMA_ARR = 255;// 自动重装载寄存器, 控制PWM周期
PWMA_CCER1 = 0;
PWMA_CCER2 = 0;
PWMA_SR1 = 0;
PWMA_SR2 = 0;
PWMA_ENO = 0;
PWMA_PS = 0;
PWMA_IER = 0;
PWMA_CCMR1 = 0x68;// 通道模式配置, PWM模式1, 预装载允许
PWMA_CCR1 = 0;// 比较值, 控制占空比(高电平时钟数)
PWMA_CCER1 |= 0x05;// 开启比较输出, 高电平有效
PWMA_PS |= 0;// 选择IO, 0:选择P1.0 P1.1, 1:选择P2.0 P2.1, 2:选择P6.0 P6.1,
bit4: ENO3P, bit3: ENO2N, bit2: ENO2P, bit1: ENO1N, bit0: ENO1P
PWMA_CCMR2 = 0x68;// 通道模式配置, PWM模式1, 预装载允许
PWMA_CCR2 = 0;// 比较值, 控制占空比(高电平时钟数)
PWMA_CCER1 |= 0x50;// 开启比较输出, 高电平有效
PWMA_PS |= (0<<2);// 选择IO, 0:选择P1.2 P1.3, 1:选择P2.2 P2.3, 2:选择P6.2 P6.3,
bit4: ENO3P, bit3: ENO2N, bit2: ENO2P, bit1: ENO1N, bit0: ENO1P
PWMA_CCMR3 = 0x68;// 通道模式配置, PWM模式1, 预装载允许
PWMA_CCR3 = 0;// 比较值, 控制占空比(高电平时钟数)
PWMA_CCER2 |= 0x05;// 开启比较输出, 高电平有效
PWMA_PS |= (0<<4);// 选择IO, 0:选择P1.4 P1.5, 1:选择P2.4 P2.5, 2:选择P6.4 P6.5,
PWMA_BKR = 0x80;// 主输出使能 相当于总开关
PWMA_CR1 = 0x81;// 使能计数器, 允许自动重装载寄存器缓冲, 边沿对齐模式, 向上计数, bit7=1:写自动重装载寄存器缓冲(本周期不会被打扰), =0:直接写自动重装载寄存器本(周期可能会乱掉)
PWMA_EGR = 0x01;//产生一次更新事件, 清除计数器和与分频计数器, 装载预分频寄存器的值
}
void StepMotor(void)
{
switch(step)
{
case 0: // AB PWM1, PWM2_L=1
PWMA_ENO = 0x00;PWM1_L=0;PWM3_L=0;
Delay_500ns();
PWMA_ENO = 0x01;// 打开A相的高端PWM
PWM2_L = 1;// 打开B相的低端
ADC_CONTR = 0x80+10;// 选择P0.2作为ADC输入 即C相电压
CMPCR1 = 0x8c + 0x10;//比较器下降沿中断
break;
case 1: // AC PWM1, PWM3_L=1
PWMA_ENO = 0x01;PWM1_L=0;PWM2_L=0;// 打开A相的高端PWM
Delay_500ns();
PWM3_L = 1;// 打开C相的低端
ADC_CONTR = 0x80+9;// 选择P0.1作为ADC输入 即B相电压
CMPCR1 = 0x8c + 0x20;//比较器上升沿中断
break;
case 2: // BC PWM2, PWM3_L=1
PWMA_ENO = 0x00;PWM1_L=0;PWM2_L=0;
Delay_500ns();
PWMA_ENO = 0x04;// 打开B相的高端PWM
PWM3_L = 1;// 打开C相的低端
ADC_CONTR = 0x80+8;// 选择P0.0作为ADC输入 即A相电压
CMPCR1 = 0x8c + 0x10;//比较器下降沿中断
break;
case 3: // BA PWM2, PWM1_L=1
PWMA_ENO = 0x04;PWM2_L=0;PWM3_L=0;// 打开B相的高端PWM
Delay_500ns();
PWM1_L = 1;// 打开C相的低端
ADC_CONTR = 0x80+10;// 选择P0.2作为ADC输入 即C相电压
CMPCR1 = 0x8c + 0x20;//比较器上升沿中断
break;
case 4: // CA PWM3, PWM1_L=1
PWMA_ENO = 0x00;PWM2_L=0;PWM3_L=0;
Delay_500ns();
PWMA_ENO = 0x10;// 打开C相的高端PWM
PWM1_L = 1;// 打开A相的低端
adc11 = ((adc11 *7)>>3) + Get_ADC10bitResult(11);
ADC_CONTR = 0x80+9;// 选择P0.1作为ADC输入 即B相电压
CMPCR1 = 0x8c + 0x10;//比较器下降沿中断
break;
case 5: // CB PWM3, PWM2_L=1
PWMA_ENO = 0x10;PWM1_L=0;PWM3_L=0;// 打开C相的高端PWM
Delay_500ns();
PWM2_L = 1;// 打开B相的低端
ADC_CONTR = 0x80+8;// 选择P0.0作为ADC输入 即A相电压
CMPCR1 = 0x8c + 0x20;//比较器上升沿中断
break;
default:
break;
}
if(B_start)CMPCR1 = 0x8C;// 启动时禁止下降沿和上升沿中断
}
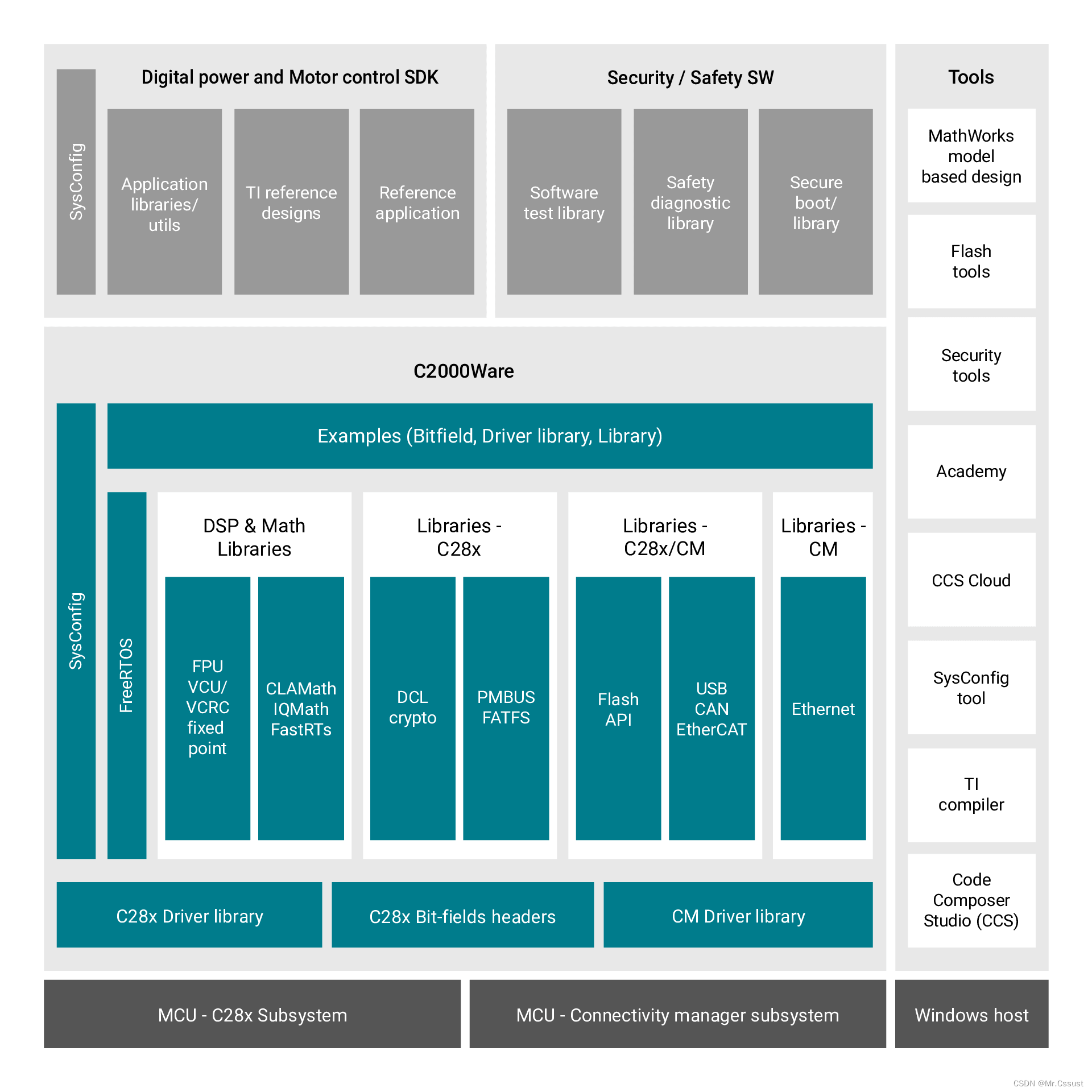
开发工具链
底层软件库、软件demo、工具链,示例如下:
参考资料
TMS320F28003x Real-Time Microcontrollers datasheet.pdf
原文地址:https://blog.csdn.net/CSSUST/article/details/138259955
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!