睿尔曼复合机器人之底盘操作流程
以操作流程为例,介绍底盘的操作流程。
开机:长按电源按钮,蜂鸣器短响两声,当第三声变长鸣后松开,等待机器开机。
使用:
- 建立通讯:主要采用无线WiFi与底盘进行通讯连接
无线连接方式:我们可以查看WiFi列表,选择名为“admin_xxxx”,密码是“12345678”。连上WiFi后即表示连接成功,同一机器可以被多台设备同时连接。
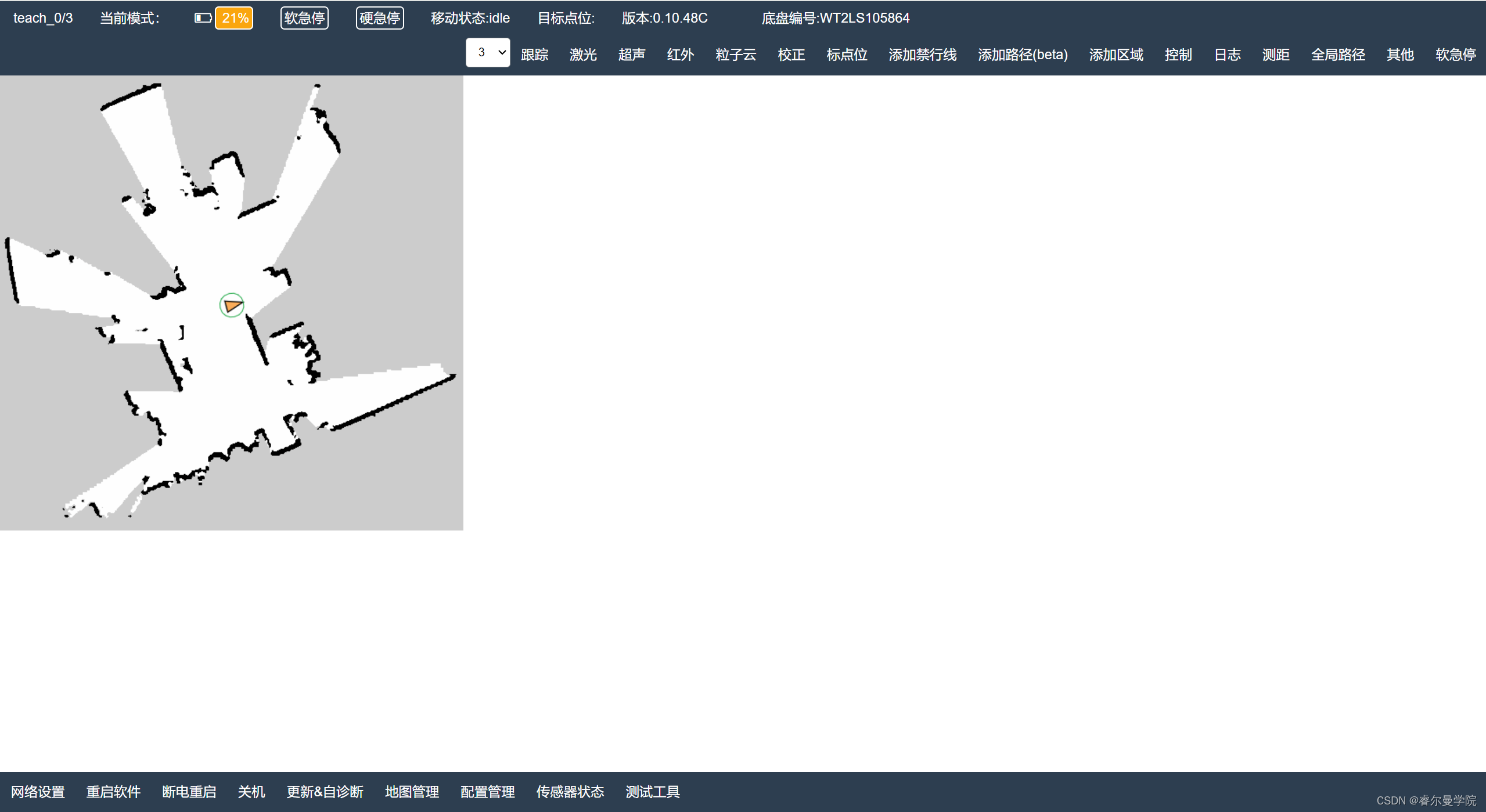
2)进入底盘的示教器页面:使⽤Chrome浏览器,访问 192.168.10.10:9001,进入底盘的监控页面,
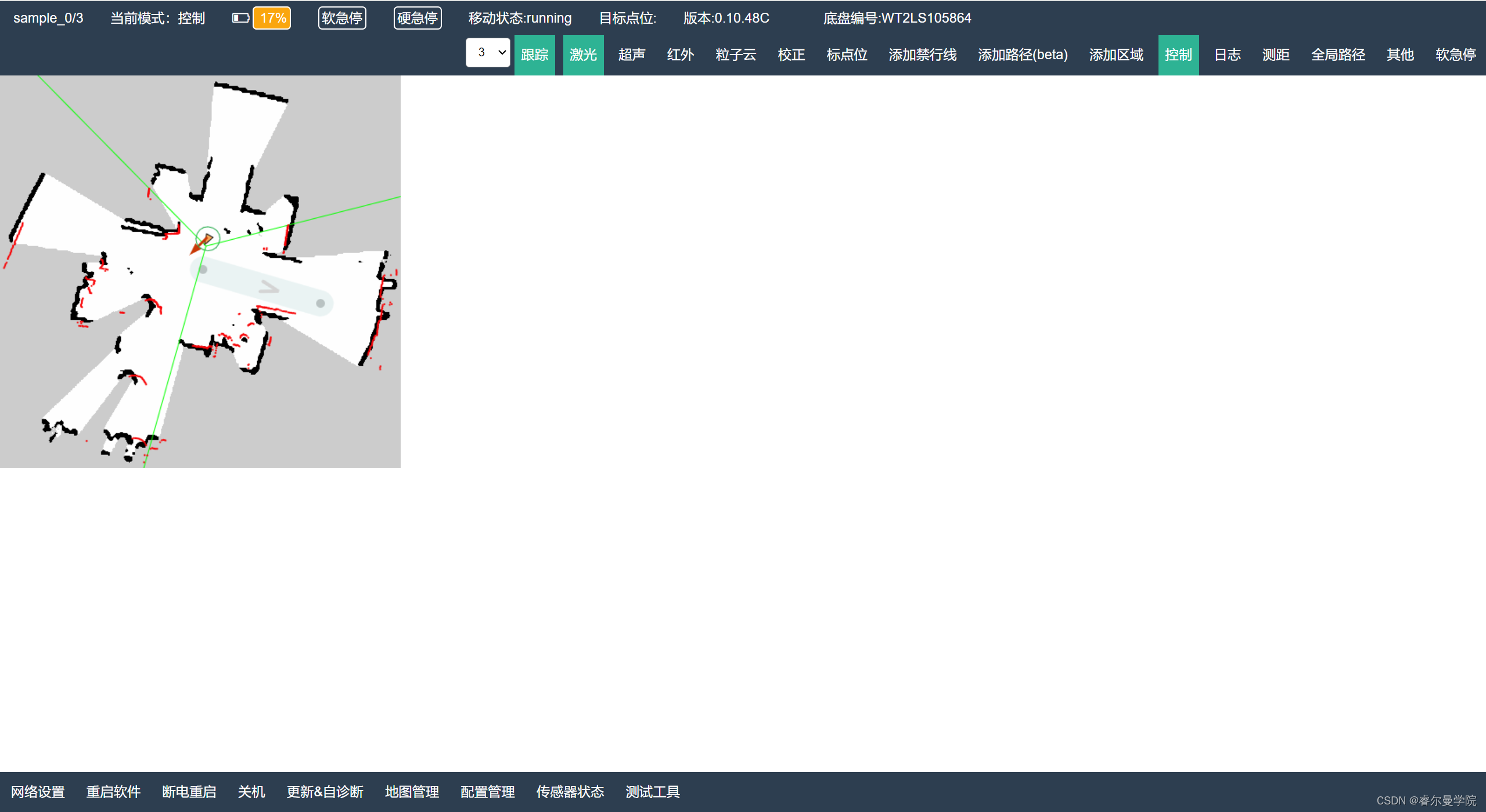
3)第一步:底盘在进行自主移动前,需要先针对现场环境进行地图创建。底盘需要边运动边对周围环境进行扫描,先点击页面上方菜单栏的“控制”键,便于在扫图过程中控制底盘进行运动。“控制键”按下后,可在键盘上通过‘i’(向前),‘k’(向后),‘j’(向左旋转),‘l’(向右旋转)四个按键对底盘进行运动控制。选中控制按钮后,可以直接在地图上可移动区域点击并拖动,机器会开始移动任务向⽬标点开始移动。
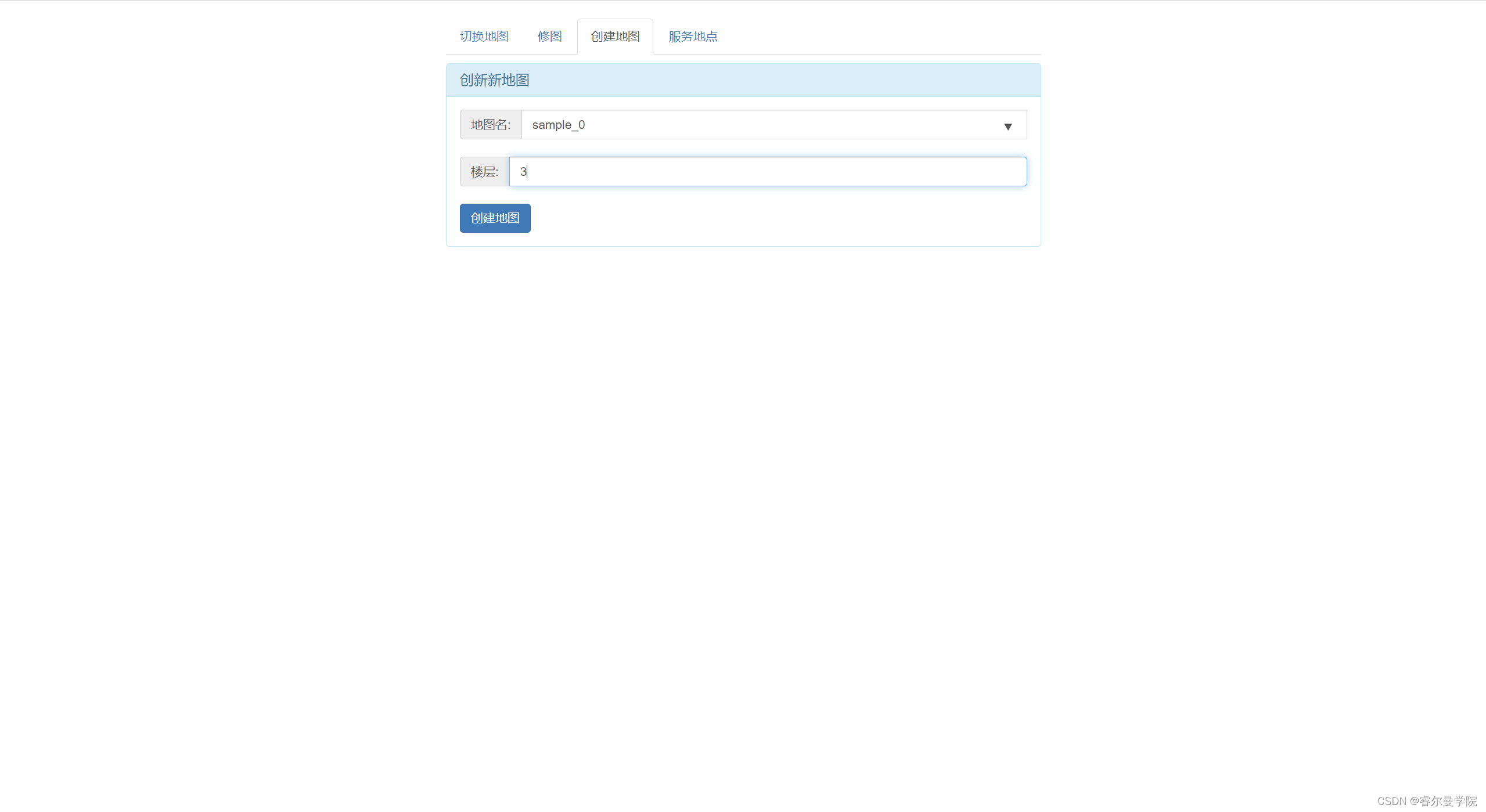
点击下方地图管理,选择“创建地图”,填写对应的地图名称及楼层后,开始创建地图。


可以在页面中看到跳动的箭头,代表底盘,箭头的朝向是底盘的前方。通过键盘控制底盘进行运动,注意扫图过程中要适当调低机器人速度。
可在页面中看到底盘扫描的地图范围随底盘运动而不断扩大,直到将场地完全扫描,即可点击保存,结束扫图。
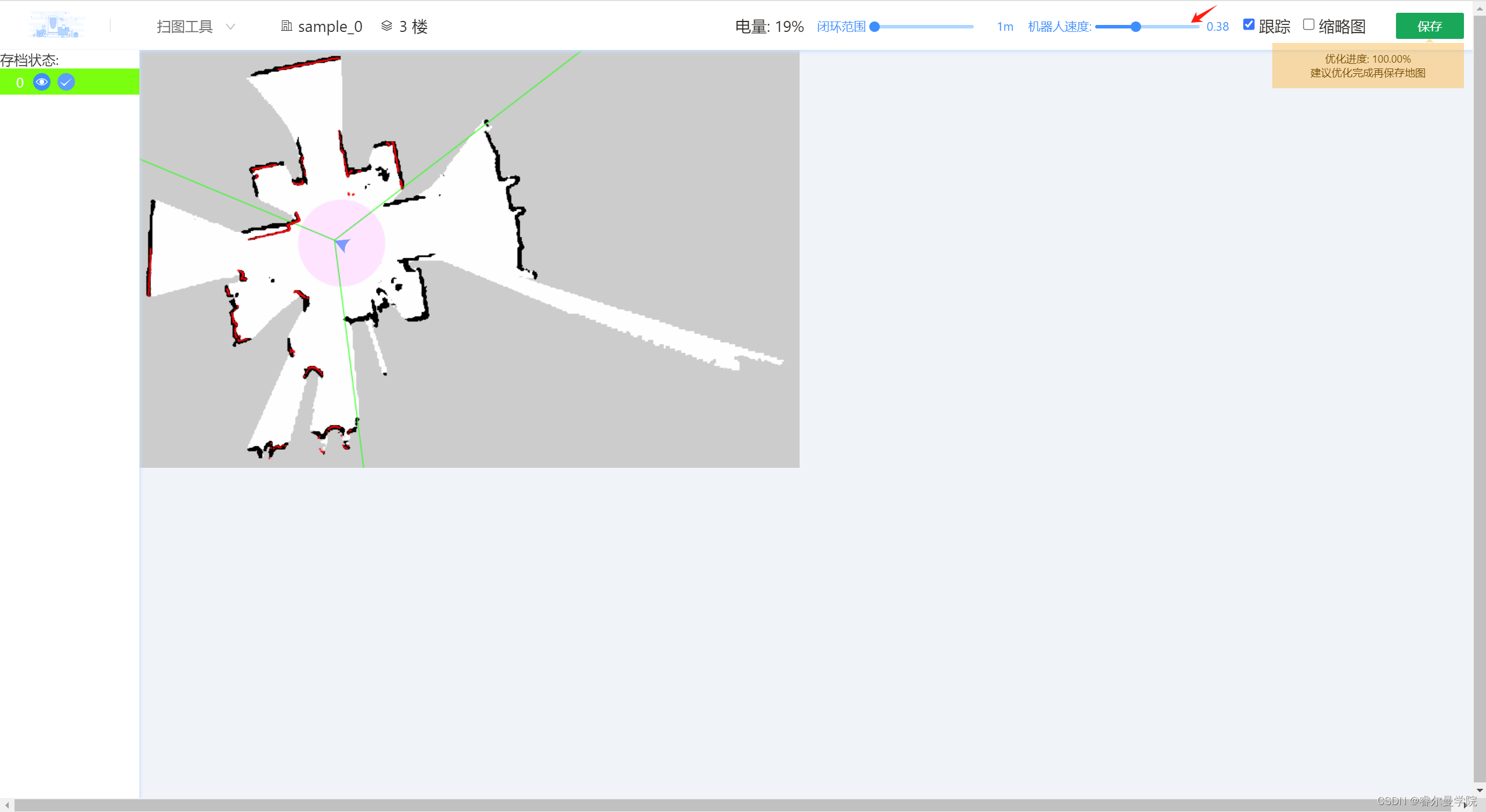
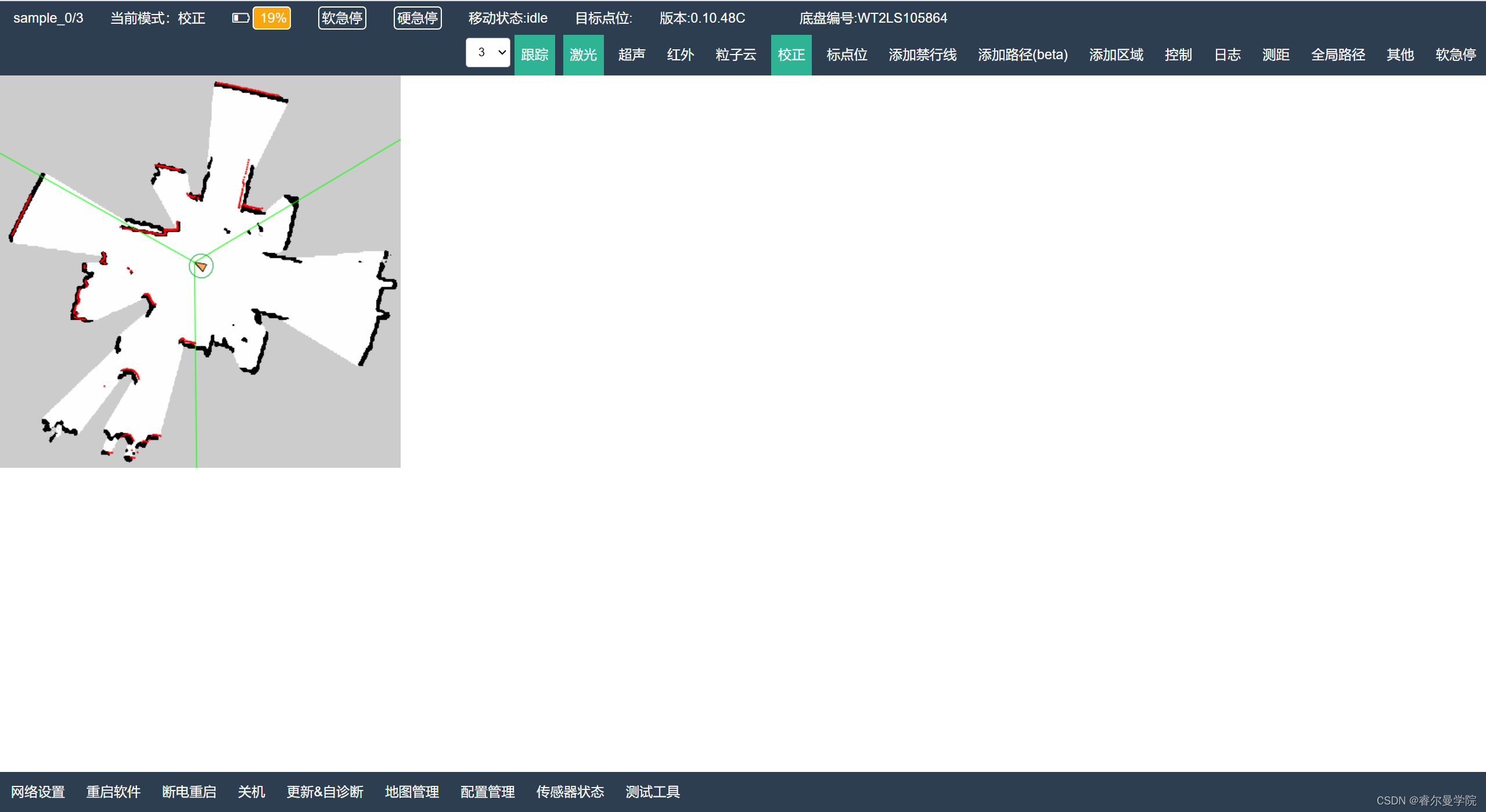
4)扫图完成后,软件会重新启动,返回到监控页面,点击“激光”可看到当前机器激光扫描的实时数据,在页面上表现为红色边界线,点击菜单栏“控制”键使底盘在一定范围内运动,扫描到尽可能多的边界线,可发现与实际地图的黑色边界线不同,需要进行手动校正。
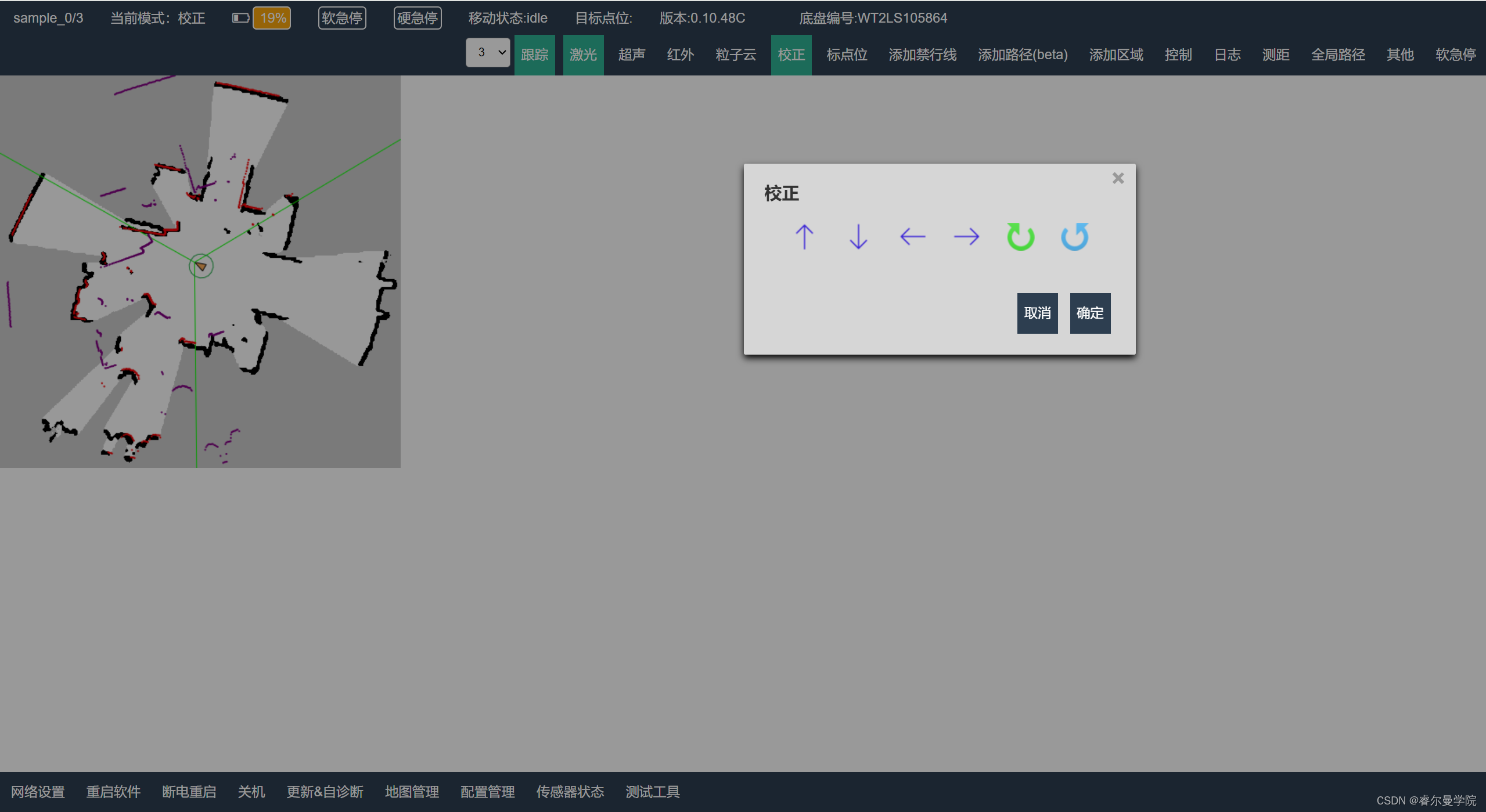
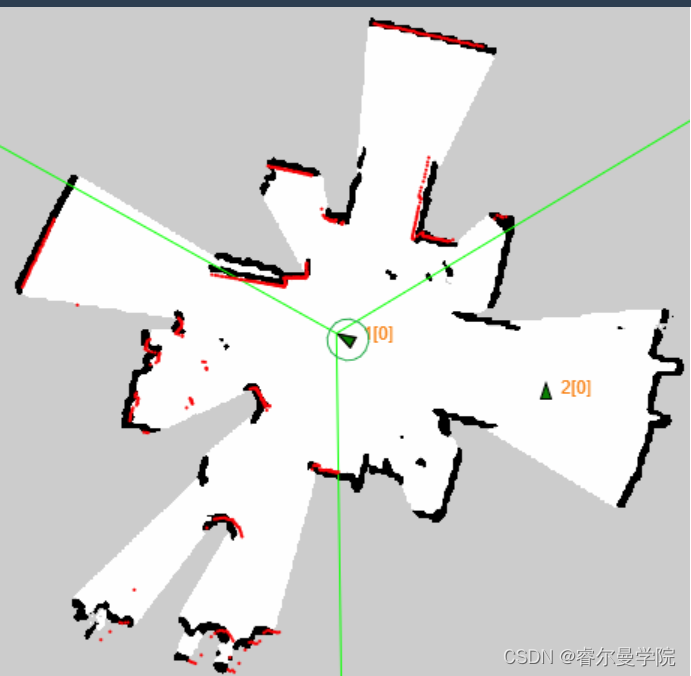
5)手动校正。通过校正按键将紫色边界线与黑色边界线尽可能重合,重合度越高,地图效果越精准。
6)标点位,可对当前位置和指定位置的点位进行标注。
7)添加禁行线,点击“添加禁行线”,可人为对底盘的运动空间进行控制。选中禁⾏线功能后,使⽤⿏标在界⾯内点击选择起点,继续在其他地⽅点击,两点之间会连成⼀条线,可以进⾏多次连续点击,形成连续线条。点错位置或者拉取完毕后点击⿏标右键可以调出操作菜单。
删除⽅法:
⿏标放置在禁⾏线上时,禁⾏线会变为蓝⾊,同时显示禁⾏线名称,此时双击⿏标会弹出禁⾏线编辑框,点击删除按钮即可删除

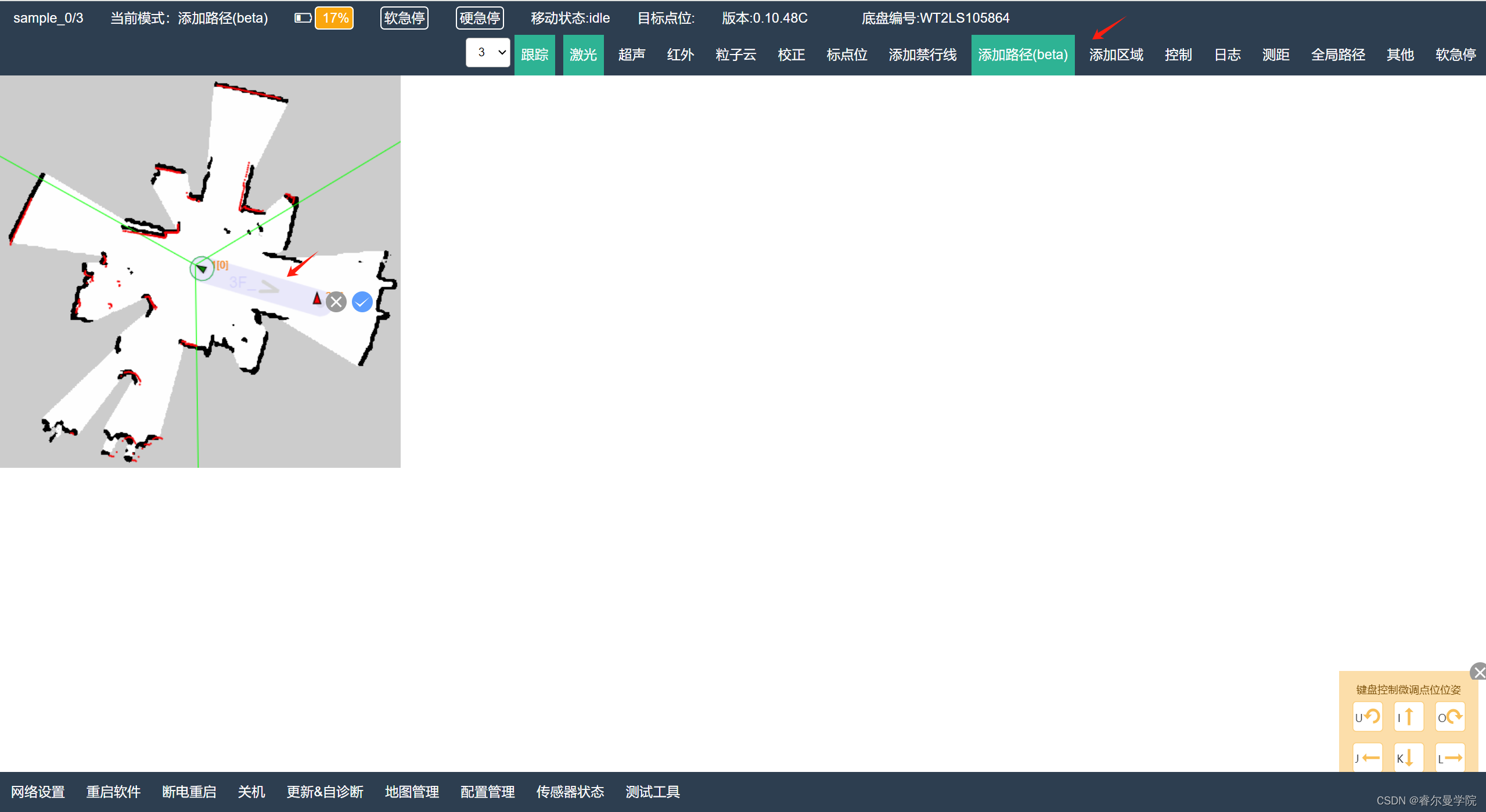
8)添加路径。菜单栏上选择“添加路径”,鼠标左键点击路径起始点,到终点再次点击,右键选择结束,则此条路径规划结束。
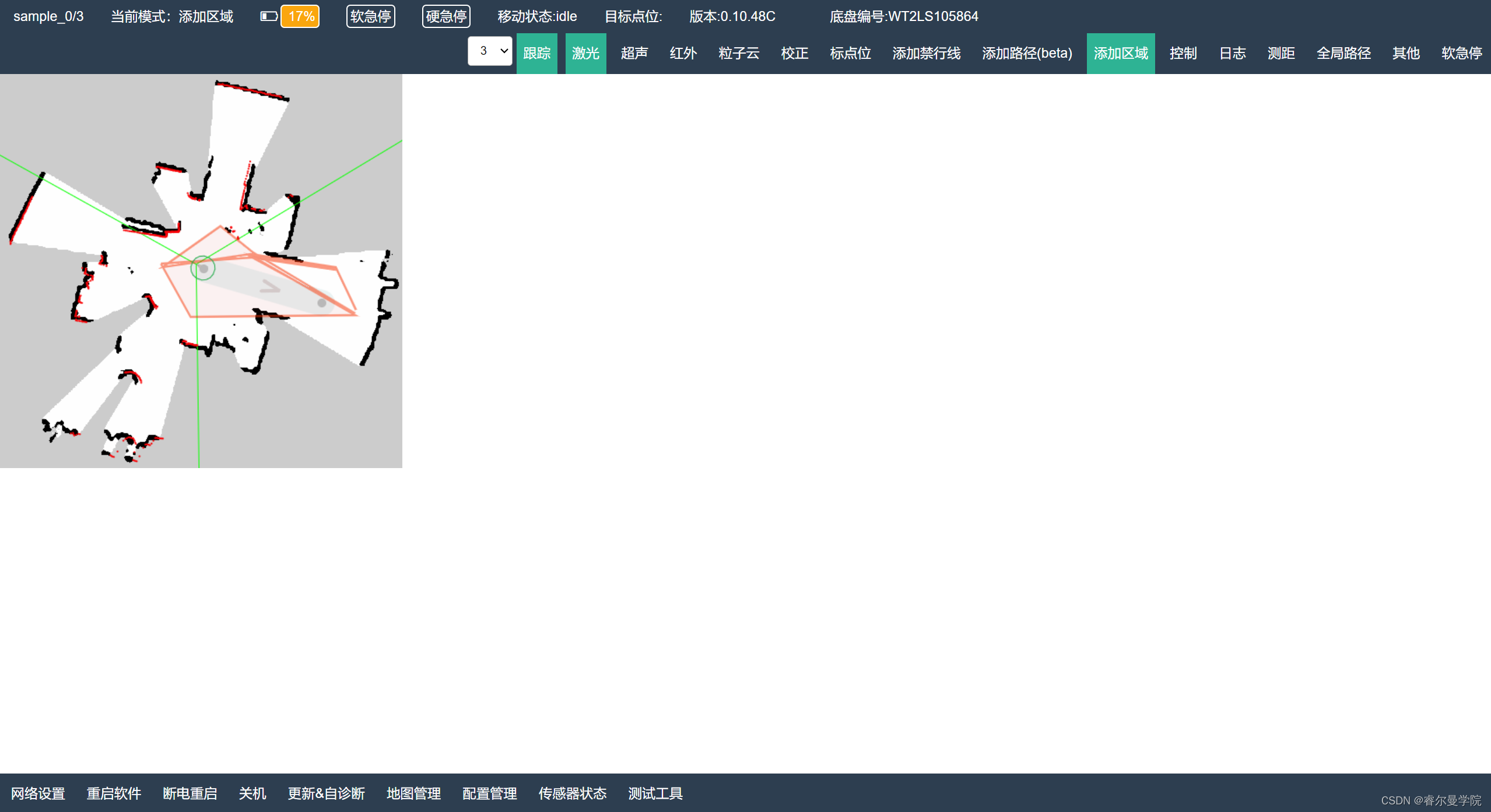
9)添加区域。区域功能可以在机器运⾏时处理⼀些特殊情况,具体使⽤根据现场情况⽽定。
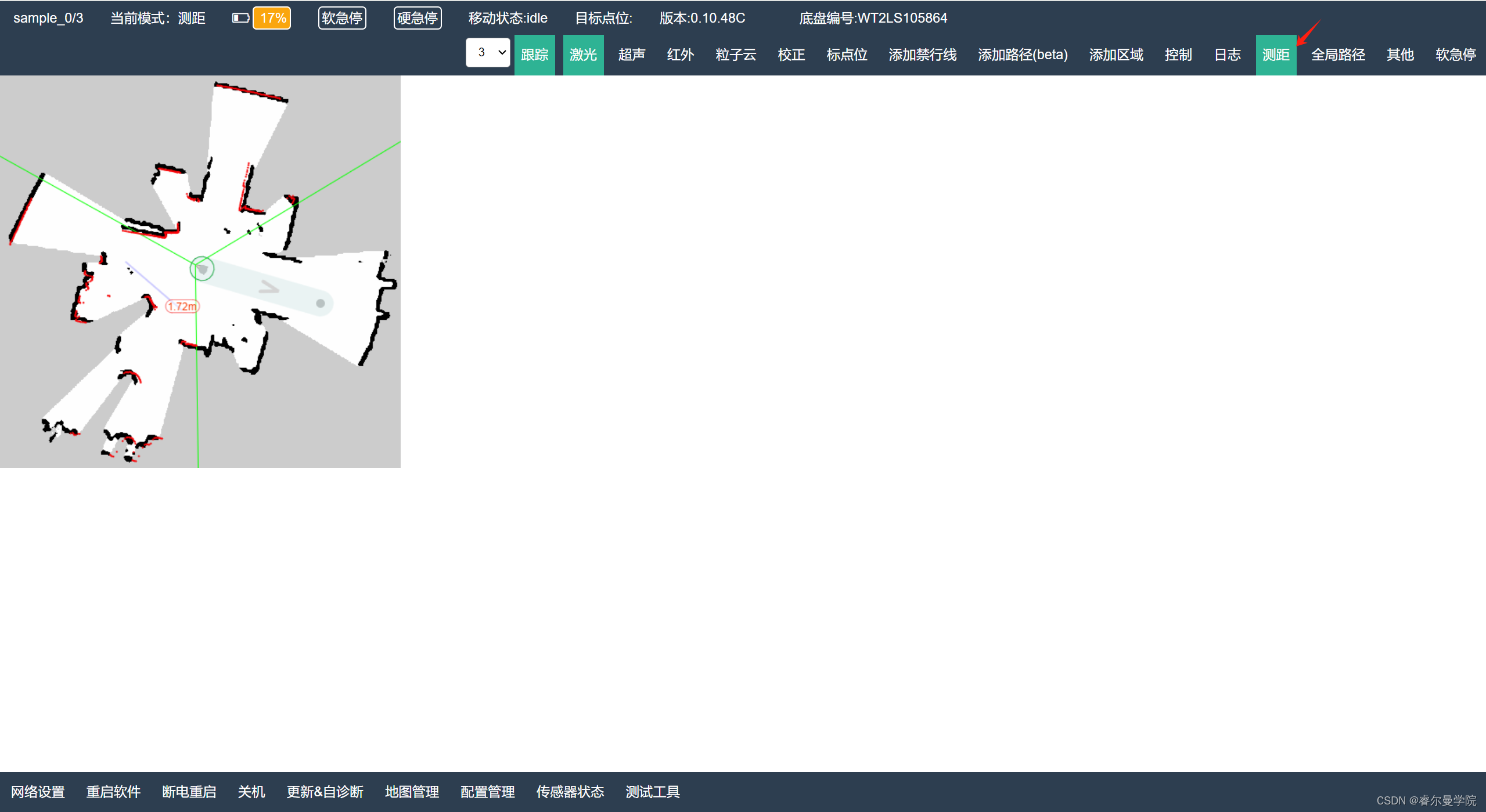
10)测距功能。鼠标左键由起始点拖动到终点,软件页面即会显示两点之间的距离。
11)关机。长按电源,机器发出七声短鸣,一声长鸣后即可松开开关。
12)充电。充电桩位置固定后通过⼿动将机器推动⾄充电桩,并使机器下⽅充电触点与充电桩上的充电⽚接触,即可正常充电,正常接触后,充电桩指示灯更换为红⾊。

原文地址:https://blog.csdn.net/realman_Rop/article/details/137653903
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!