图像融合论文阅读:CrossFuse: 一种基于交叉注意机制的红外与可见光图像融合方法
@article{li2024crossfuse,
title={CrossFuse: A novel cross attention mechanism based infrared and visible image fusion approach},
author={Li, Hui and Wu, Xiao-Jun},
journal={Information Fusion},
volume={103},
pages={102147},
year={2024},
publisher={Elsevier}
}
论文级别:SCI A1
影响因子:18.6
文章目录
📖论文解读
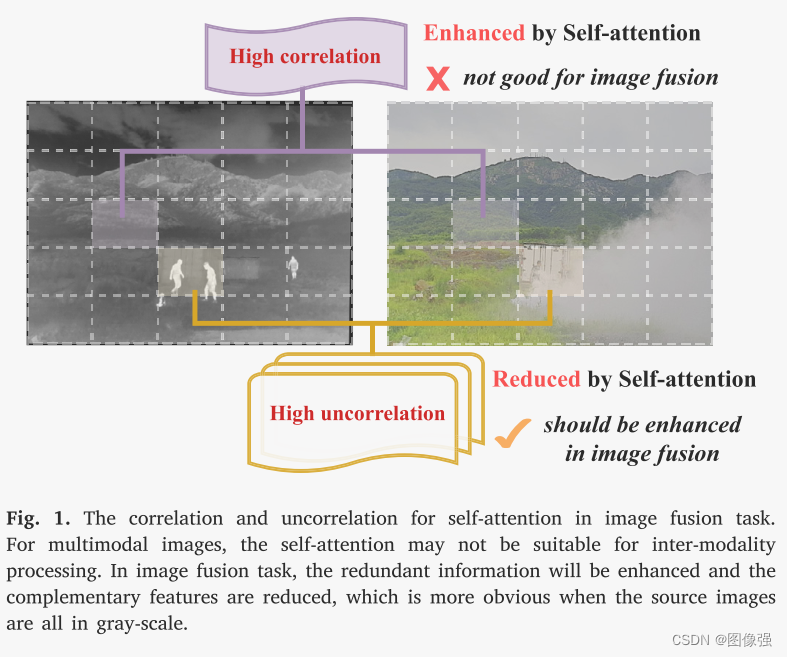
以往的交叉注意力只考虑相关性,而图像融合任务需要关注互补信息。
为了解决这个问题,作者提出了CrossFuse,使用【交叉注意力机制CAM】增强互补信息,使用了两阶段训练策略。
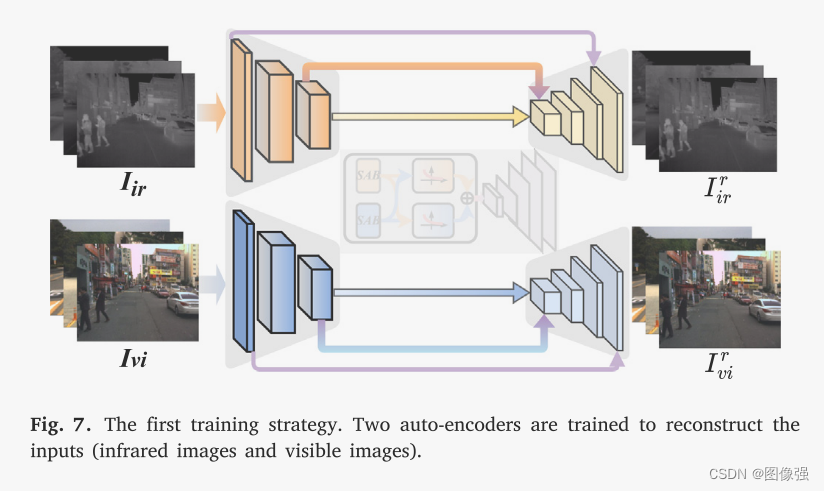
第一阶段为两种模态训练结构相同的自编码器
第二阶段固定编码器参数,训练CAM和解码器
🔑关键词
Image fusion 图像融合
Transformer
Cross attention 交叉注意力
Infrared image 红外图像
Visible image 可见光图像
💭核心思想
通过【交叉注意力机制CAM】增强互补信息,降低冗余特征的负面影响。
从下图中我们可以看到,相同场景的不同模态图像,有高相关性区域和高度不相关性区域。
🪅相关背景知识
🪢网络结构
作者提出的网络结构如下所示。
I
i
r
I_{ir}
Iir和
I
v
i
I_{vi}
Ivi分别代表红外图像和可见光图像,两个编码器提取多模态信息。
基于Transformer的CAM结构用来融合多模态特征
解码器用来产生融合图像
F
F
F
在编码器和解码器之间有两个skip connection,用来保留源图的更多深/浅层特征
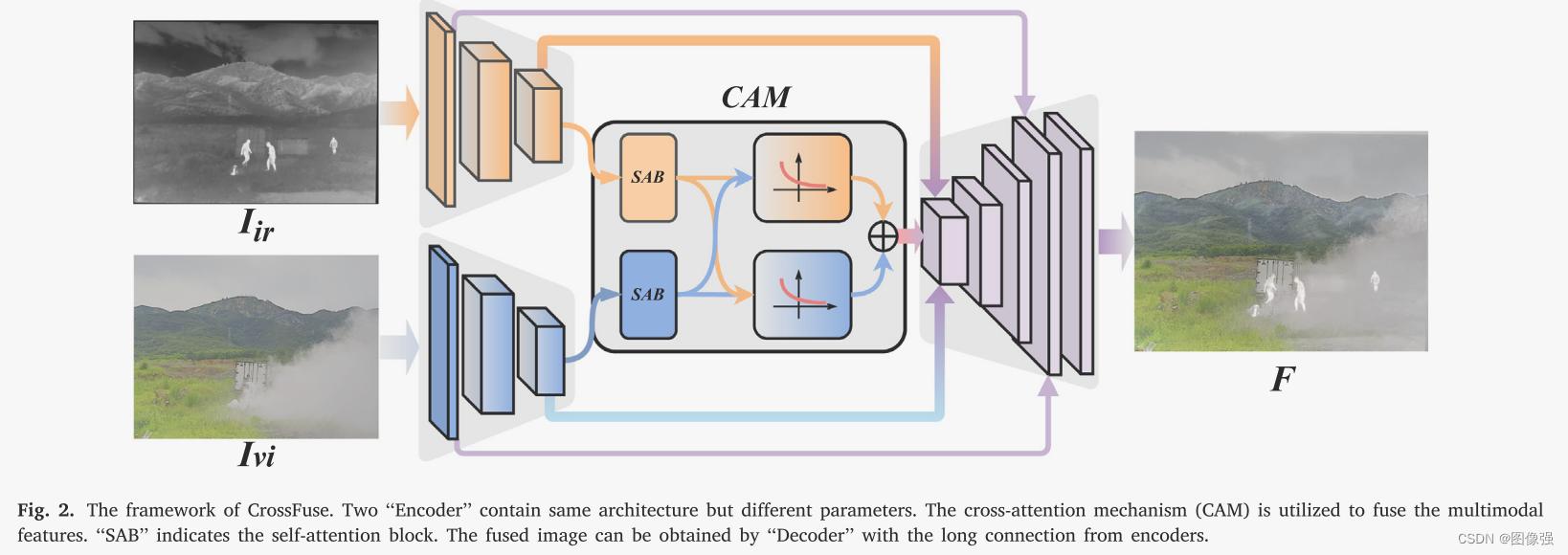
为什么使用两个编码器呢?因为作者认为两个模态间信息差距较大,这两个编码器结构是相同的,但是网络内部参数却有所区别。
下面我们一起来看看编码器的详细结构
🪢编码器
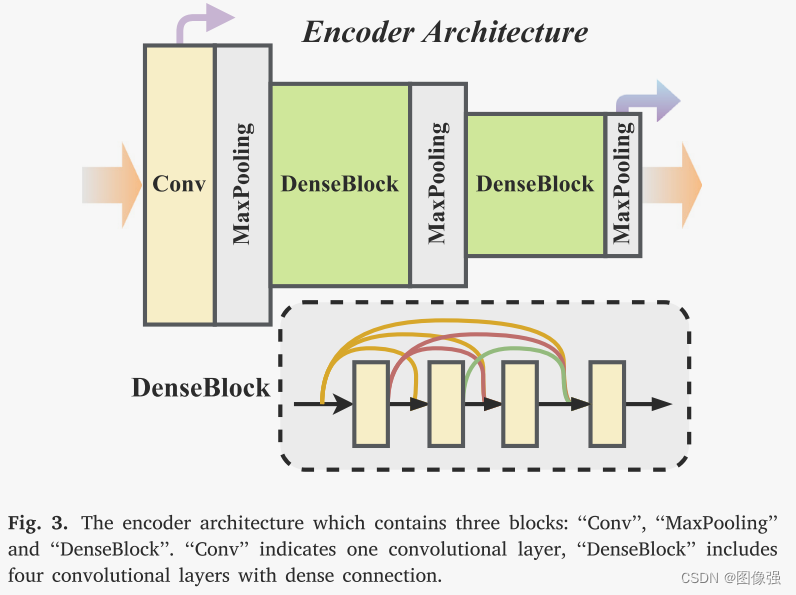
第一个卷积层用来提取浅层特征(保留了丰富的纹理信息),然后经过最大池化,DenseBlock保留多尺度特征中更多有用信息,随着编码器层数越来越深,深层特征开始集中在显著目标上。
为了增强细节信息和显著特征,在编码器和解码器之间加入了两个跳接。就是上图两个蓝紫色箭头,一个在Conv上,还有一个在最后一个最大池化层上。
🪢CAM
Cross-attention mechanism,交叉注意力机制。其结构如下图所示。
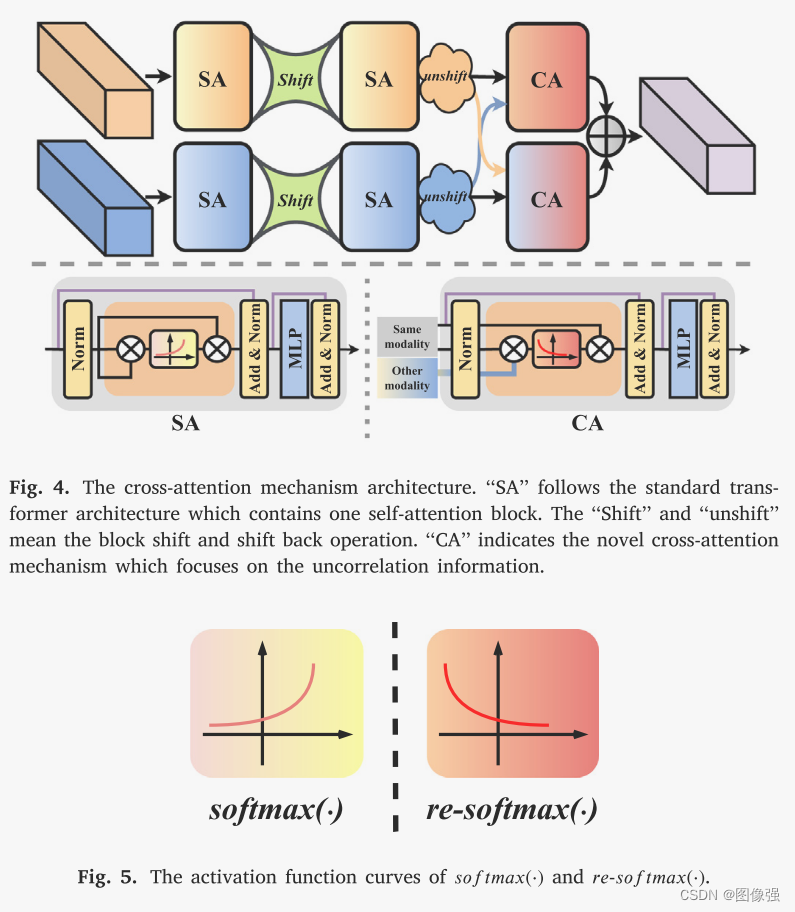
两个分支的参数是不相同的,每个模态的特征首先经过自注意力机制SA以增强内部特征,然后经过shift操作(在水平和垂直方向移动特征位置),然后再经过SA,然后unshift恢复位置,经过交叉注意力机制CA得到融合特征。
🪢SA
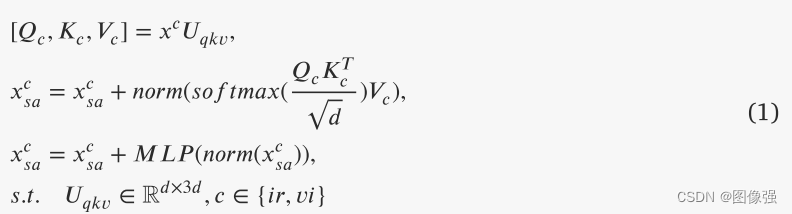
x
c
x^c
xc是SA的输入,也就下图(图4)左边的长条立方体,编码器的输出。
Q
c
K
c
V
c
Q_cK_cV_c
QcKcVc是输入的不同表示,涉及Transformer里的知识,不了解的同学可以参考下面的链接。
U
q
k
v
U_{qkv}
Uqkv是可以通过全连接层学习参数的变换矩阵
d
d
d是输入向量的维度
n
o
r
m
norm
norm表示线性范数运算
M
L
P
(
⋅
)
MLP(·)
MLP(⋅)是多层感知机
扩展学习
史上最小白之Transformer详解
🪢CA
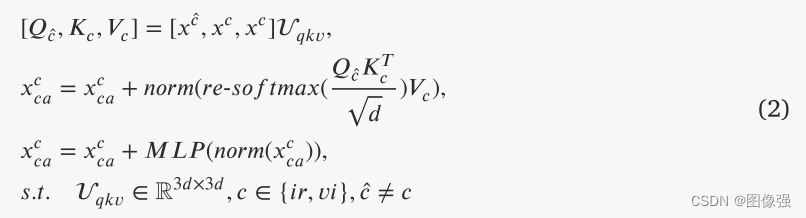
在2式总,
c
c
c和
c
^
\hat c
c^代表不同模态。
这个地方的交叉计算,和SwinFusion有点像,感兴趣的读者可以移步去看我的另外一篇阅读笔记。
扩展学习
SwinFusion阅读笔记
SA和CA最大的区别在于矩阵乘法后的激活函数,即CA用到了反向softmax。

作者给出这个地方的解释是,对于不同的模态,应该增强互补(不相关)信息而不是冗余(相关)特征。
在经过CAM之后,得到了一个融合特征,接下来我们需要将这个融合特征解码为融合图像。
🪢解码器
解码器的结构如下图所示。
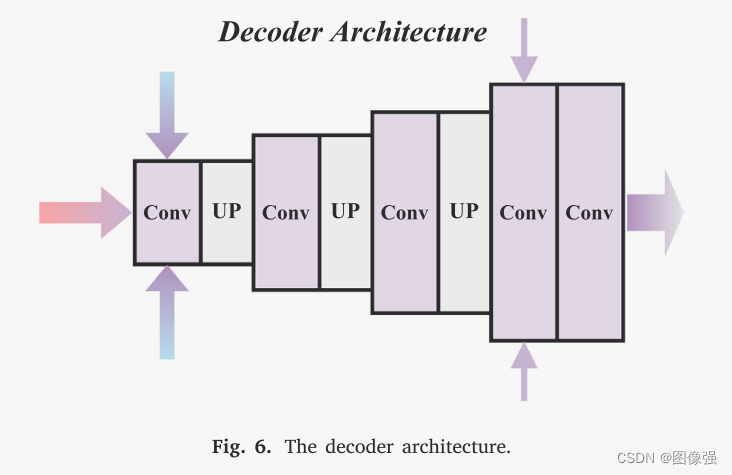
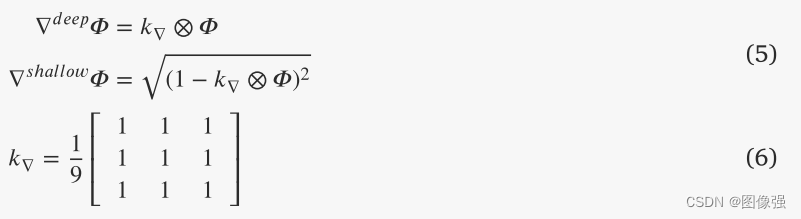
除了在编码器中刚提到两个skip connection以外,作者还加入了【特征强度感知策略】(the feature intensity aware strategy)用来进行【多级特征融合】,其公式如下:

(
⋅
)
(·)
(⋅)表示深层特征中的位置
Φ
c
m
\Phi^m_c
Φcm代表了CAM提取的特征,
Φ
i
r
m
\Phi^m_{ir}
Φirm和
Φ
v
i
m
\Phi^m_{vi}
Φvim分别代表了红外图像和可见光图像的特征。
∇
m
∇^m
∇m分别表示浅层特征和深层特征的细节和基础信息提取器。其计算公式为:
🎢训练设置
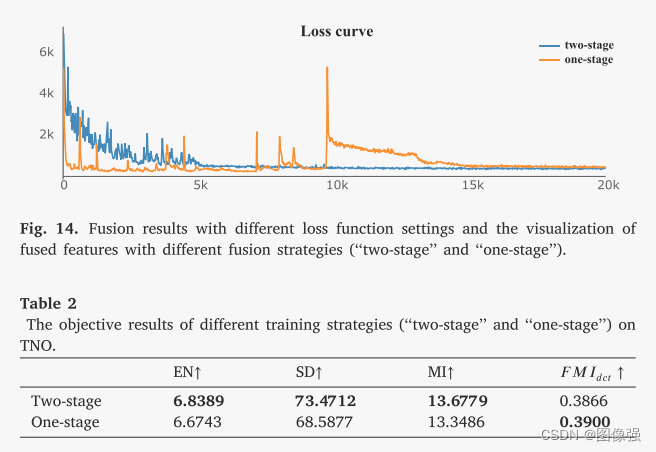
本文采用了两阶段训练。
一阶段:编码器训练。为每种模态构建自编码器网络用于重建输入。
二阶段:针对不同的编码器, 训练CAM和解码器。
🎢一阶段
一阶段训练的损失函数用到了像素损失和结构损失:

系数为1e4
🎢二阶段
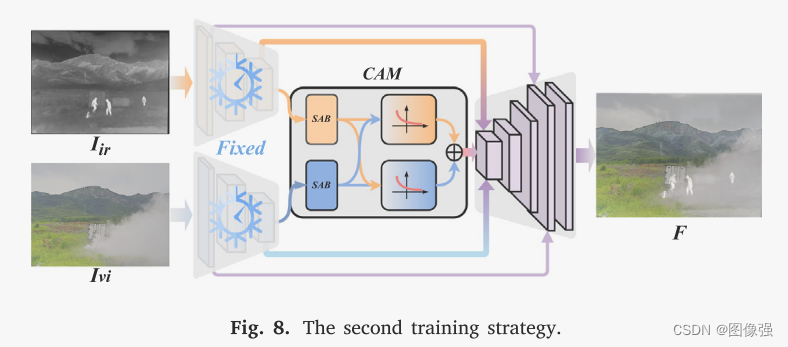
二阶段训练的时候,固化一阶段训练好的编码器。训练CAM和解码器。
该阶段作者提出了一种注意损失函数,CAM损失=强度损失+10*梯度损失


M
c
M_{c}
Mc代表单个模态的强度掩码

l
o
c
c
loc_c
locc代表单个模态源图像中局部patch的平均值,可以用下式计算:

a
v
g
c
avg_c
avgc代表通过11×11核大小的均值滤波器
∇
a
∇_a
∇a计算得到的单个模态的值。

∇
g
∇_g
∇g代表了3×3的均值滤波器
训练设置如下所示。
📉损失函数
上节已介绍。
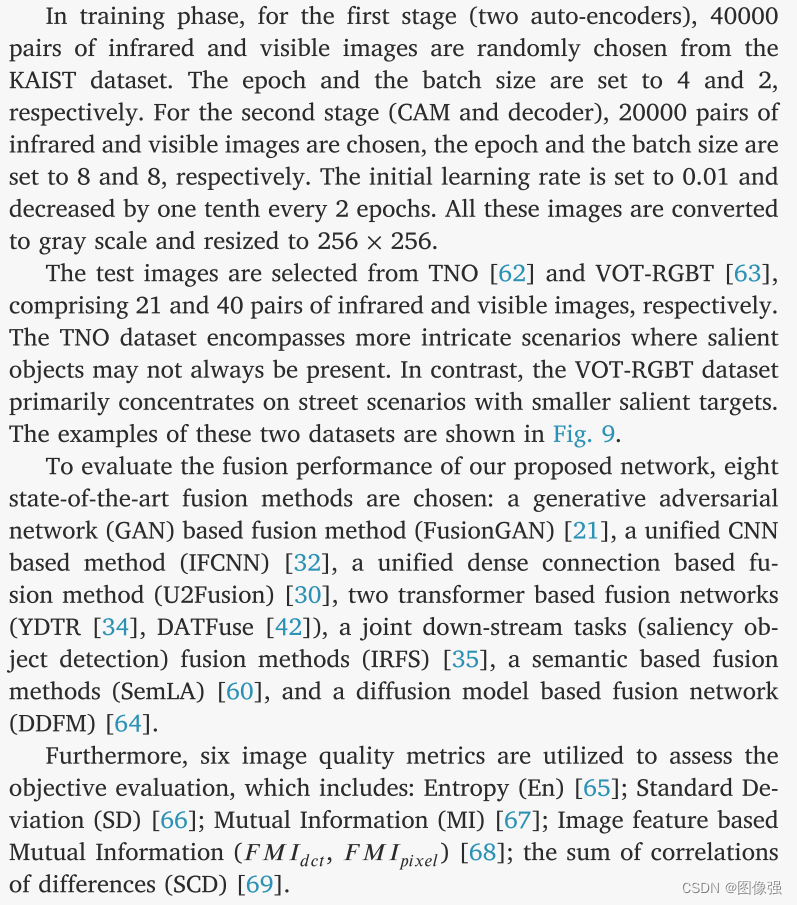
🔢数据集
- 训练:KAIST
- 测试:TNO, VOT-RGBT
图像融合数据集链接
[图像融合常用数据集整理]
🔬实验
📏评价指标
- EN
- SD
- MI
- FMI_dct
- FMI_pixel
- SCD
扩展学习
[图像融合定量指标分析]
🥅Baseline
- FusionGAN, IFCNN, U2Fusion, YDTR, DATFuse, IRFS, SemLA, DDFM
✨✨✨扩展学习
✨✨✨强烈推荐必看博客[图像融合论文baseline及其网络模型]✨✨✨
🔬实验结果

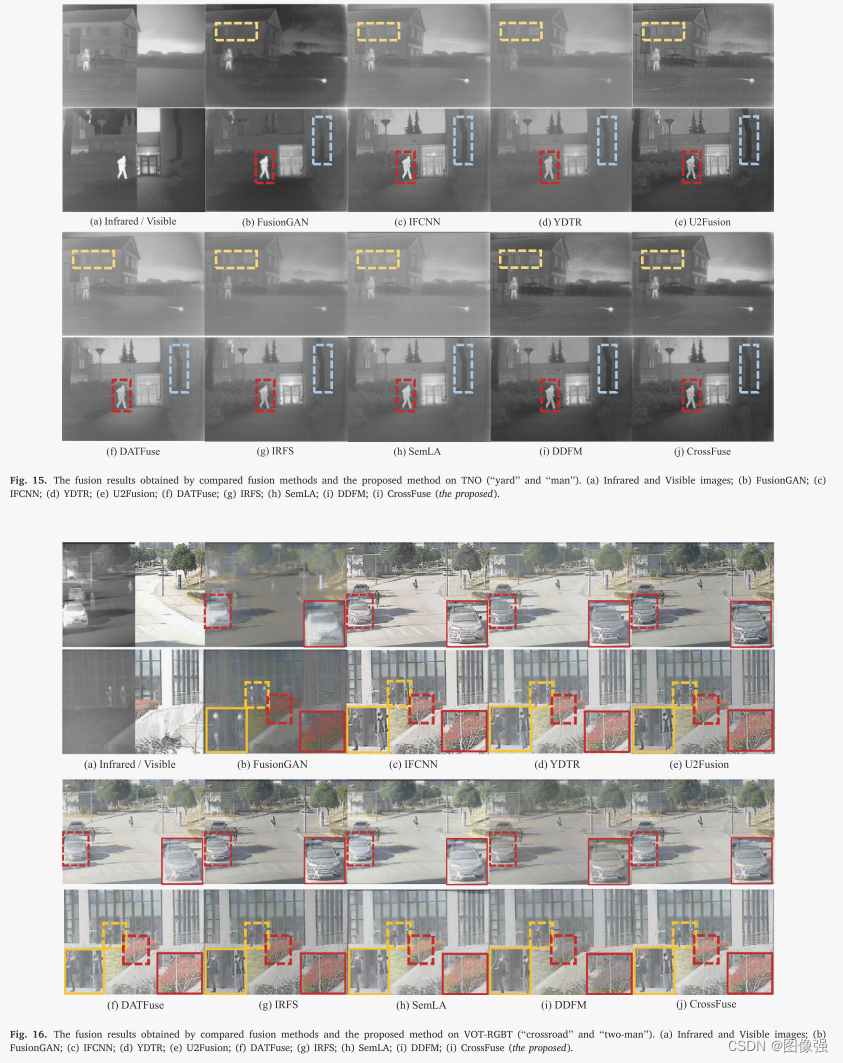
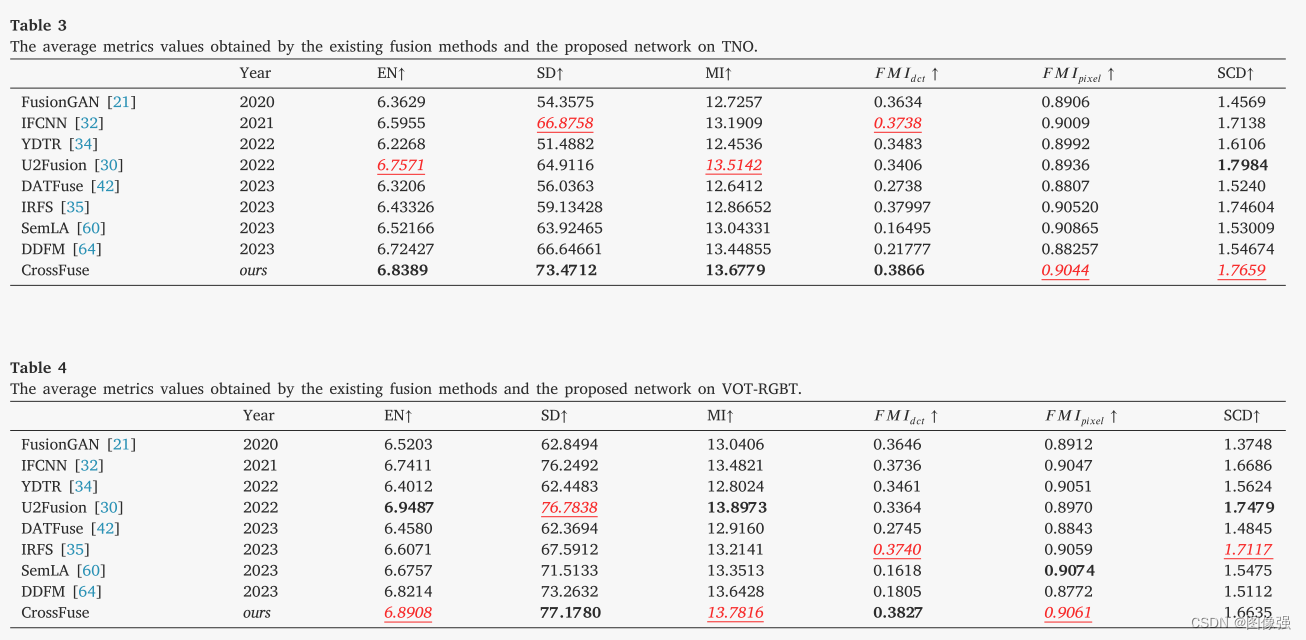
更多实验结果及分析可以查看原文:
📖[论文下载地址]
🚀传送门
📑图像融合相关论文阅读笔记
📑[(DIF-Net)Unsupervised Deep Image Fusion With Structure Tensor Representations]
📑[(MURF: Mutually Reinforcing Multi-Modal Image Registration and Fusion]
📑[(A Deep Learning Framework for Infrared and Visible Image Fusion Without Strict Registration]
📑[(APWNet)Real-time infrared and visible image fusion network using adaptive pixel weighting strategy]
📑[Dif-fusion: Towards high color fidelity in infrared and visible image fusion with diffusion models]
📑[Coconet: Coupled contrastive learning network with multi-level feature ensemble for multi-modality image fusion]
📑[LRRNet: A Novel Representation Learning Guided Fusion Network for Infrared and Visible Images]
📑[(DeFusion)Fusion from decomposition: A self-supervised decomposition approach for image fusion]
📑[ReCoNet: Recurrent Correction Network for Fast and Efficient Multi-modality Image Fusion]
📑[RFN-Nest: An end-to-end resid- ual fusion network for infrared and visible images]
📑[SwinFuse: A Residual Swin Transformer Fusion Network for Infrared and Visible Images]
📑[SwinFusion: Cross-domain Long-range Learning for General Image Fusion via Swin Transformer]
📑[(MFEIF)Learning a Deep Multi-Scale Feature Ensemble and an Edge-Attention Guidance for Image Fusion]
📑[DenseFuse: A fusion approach to infrared and visible images]
📑[DeepFuse: A Deep Unsupervised Approach for Exposure Fusion with Extreme Exposure Image Pair]
📑[GANMcC: A Generative Adversarial Network With Multiclassification Constraints for IVIF]
📑[DIDFuse: Deep Image Decomposition for Infrared and Visible Image Fusion]
📑[IFCNN: A general image fusion framework based on convolutional neural network]
📑[(PMGI) Rethinking the image fusion: A fast unified image fusion network based on proportional maintenance of gradient and intensity]
📑[SDNet: A Versatile Squeeze-and-Decomposition Network for Real-Time Image Fusion]
📑[DDcGAN: A Dual-Discriminator Conditional Generative Adversarial Network for Multi-Resolution Image Fusion]
📑[FusionGAN: A generative adversarial network for infrared and visible image fusion]
📑[PIAFusion: A progressive infrared and visible image fusion network based on illumination aw]
📑[CDDFuse: Correlation-Driven Dual-Branch Feature Decomposition for Multi-Modality Image Fusion]
📑[U2Fusion: A Unified Unsupervised Image Fusion Network]
📑综述[Visible and Infrared Image Fusion Using Deep Learning]
📚图像融合论文baseline总结
📑其他论文
📑[3D目标检测综述:Multi-Modal 3D Object Detection in Autonomous Driving:A Survey]
🎈其他总结
🎈[CVPR2023、ICCV2023论文题目汇总及词频统计]
✨精品文章总结
✨[图像融合论文及代码整理最全大合集]
✨[图像融合常用数据集整理]
🌻【如侵权请私信我删除】
如有疑问可联系:420269520@qq.com;
码字不易,【关注,收藏,点赞】一键三连是我持续更新的动力,祝各位早发paper,顺利毕业~
原文地址:https://blog.csdn.net/jiexiang5396/article/details/135402976
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!