强推!首个全面涵盖LiDAR里程计算法的综述(二):多激光与多传感器融合激光里程计综述
该篇文章是对LiDAR里程计(Odometry)的最新进展和挑战进行的全面综述。是首个全面涵盖LiDAR里程计各类方法的综述,填补了之前研究的空白。为了让读者深入了解该项技术,笔者结合自身的一些经验和理解,将拆分成三个部分为大家详细解读,分别为:LiDAR-Only与LIO算法综述(一),多激光与多传感器融合激光里程计综述(二),激光里程计尚存挑战,公开数据集与评估方法综述(三)。本篇文章为第二讲:多激光与多传感器融合激光里程计综述
![]()
多LiDARs里程计算法综述
LIO算法通过实际工程中的一些适配小技巧以及强大的调参技术,定位的精度和鲁棒性已经达到了商业化水平。然而,由于某些LiDAR的视场角(FOV)有限,扫描得到的点云较为稀疏,以及环境中的一些遮挡情况,这些对状态估计带来了新的挑战。
为了应对上述单激光雷达系统面临的挑战,多激光雷达进行里程计估算是称为关注的热点。
-
多激光雷达里程计领域的开创性研究始于M-LOAM。M-LOAM假设所有激光雷达都同步,涉及从每个激光雷达中提取特征、数据聚合和智能体状态估计。然而,通过PPS(每秒脉冲)同步多个激光雷达增加了复杂性,并需要额外的硬件支持。另一方面,通过PTP(精确时间协议)同步主要是为了统一时间标准,但这可能需要额外的努力来实现数据同步。
-
Lin等人采用分布式扩展卡尔曼滤波器(EKF),同时运行多个EKF实例,每个实例对应一个激光雷达。虽然这种方法能够处理异步的激光雷达,但它并未充分利用所有激光雷达的联合测量,降低了多激光雷达的优势。
-
在使用每个激光雷达的独立测量进行状态估计时,单个激光雷达遇到的遮挡问题可能对后续的状态估计产生级联影响。LOCUS假设所有激光雷达都同步,指出显著的时间差异可能导致状态估计失败。在后续研究中,他们通过丢弃延迟扫描来增强鲁棒性,尽管这种方法牺牲了一些信息。
-
类似地,M-LIO通过信号关联来处理激光雷达之间的异步问题,但它缺乏一种方法来补偿异步引起的时间差异。
为了解决这些问题,后续方案引入了IMU传感器,用于校正异步激光雷达测量中的时间差异,这与激光雷达-惯性里程计的作用类似。
-
Nguyen等人和Wang等人使用IMU传播来补偿多个激光雷达之间的时间差异。他们从每个点云中提取边缘和平面特征,并将这些特征转换到与最近一次激光雷达采集时间对齐的公共参考框架中。尽管这些方法成功地估算了机器人轨迹,但它们也引入了额外的挑战。IMU传播本质上是离散的,由于频率原因,需要额外的线性插值,这可能导致额外的误差。此外,随着时间差异变得更加显著,累积点云所需的时间也增加,这进一步加重了对IMU状态传播的依赖。然而,IMU传播的精度随着时间的延长而下降,受到噪声的影响,可能会对里程计产生不利影响。
-
MA-LIO采用了B样条插值作为线性插值的替代方法,有效补偿了时间差异。
-
Jung等人利用逐点不确定性,根据采集时间分配惩罚,解决了IMU传播精度下降的问题。
-
SLICT将每个激光雷达的点云解释为连续流,仅结合在指定时间间隔内捕获的点云,即使存在显著的时间差异,也保持了稳定的累积时间。
使用多激光雷达进行里程计估算解决了与单激光雷达配置相关的限制,提升了性能。然而,优化激光雷达放置、增加的计算需求以及单激光雷达系统的固有问题仍然存在。总体来看,虽然多LiDARs存在计算量翻倍等问题,但是随着计算平台的不断升级,其优势是显著的。在已量产的一些智驾车型中,已经有了多激光雷达的方案,并且在一些封闭场景中,如港口,矿区等,多激光雷达方案是标配。
多传感器融合里程计算法综述
与视觉传感器不同,激光雷达在光照条件变化时表现出很强的鲁棒性;然而,在严苛环境中它也面临挑战。具体来说,激光雷达里程计在雨、雪和尘土等不利条件下难以获得精确的测量结果。此外,在几何特征有限或地形重复的区域,如长隧道或高速公路,激光雷达的测量也容易受到影响。这种脆弱性导致扫描匹配困难,进而影响状态估计的精度。解决这些问题的一个方法是探索多模态传感器融合,这也是当前研究的一个重要方向。
RGB相机在捕捉颜色和纹理方面具有显著优势,尤其是在几何特征稀少的环境中。在此类场景中,将图像与激光雷达测量数据结合,可以显著提高状态估计的可靠性。
-
Lin等人提出了R2 live,一种紧耦合的激光雷达-视觉-惯性里程计系统,它结合了基于高频滤波和低频图优化的两种方法。高频滤波器利用激光雷达、相机和IMU的测量数据,而因子图则优化局部地图和视觉地标。
-
LVI-SAM由两个联合运行的子系统组成:激光雷达-惯性系统(LIS)和视觉-惯性系统(VIS)。每个子系统的估计位姿为另一个子系统提供初始位姿。当由于剧烈运动或光照变化导致VIS中的特征数量减少时,LIS独立运行,但这可能导致LIS的失败。类似于R2 live,
-
R3 live也将激光雷达-惯性里程计(LIO)和视觉-惯性里程计(VIO)分开。LIO重建几何结构,而VIO重建纹理信息。该VIO系统使用RGB彩色点云地图进行状态估计,最小化光度误差,而无需检测视觉特征,从而节省了处理时间。
-
Fast-LIVO通过直接配准点云而不提取特征来提高效率。通过重用LIO和VIO子系统的点云数据,优化了速度并提高了整体系统效率。
-
LIC-fusion通过多状态约束卡尔曼滤波器(MSCKF)融合稀疏的激光雷达特征和视觉特征,并进行在线多传感器校准。
-
在连续时间SLAM的背景下,连续时间激光雷达-视觉-惯性里程计引起了越来越多的关注。Coco-LIC采用基于非均匀B样条的连续时间轨迹表示,无缝集成了激光雷达和相机数据,以紧耦合的方式进行处理。
RGB相机依赖环境光线捕捉图像,其性能在低光或恶劣天气条件下往往会下降。为应对这些挑战,操作在红外波长范围的热成像摄像头在光线恶劣的环境中表现出色。Rho等人在室内灾害场景中使用了结合激光雷达的立体热成像相机。此外,雷达和事件相机在严苛环境条件下也表现出了很强的鲁棒性。热成像相机、雷达和事件相机与激光雷达结合使用,能够克服RGB相机的局限性,提供切实可行的替代方案。这些多样化的传感器模态可以显著提高里程计精度。
这些传感器模态的应用不仅限于移动机器人或手持系统,还扩展到了足式机器人。足式机器人擅长在崎岖不平的地形上行走,能够跨越岩石或碎片等障碍物,这使其在搜索和救援任务、探索和灾害响应等任务中表现出色。VILENS结合了激光雷达、IMU、相机和基于关节运动学模型的腿部接触信息。该集成传感器融合系统即使在恶劣环境中也能实现精确的里程计估计。
融合多种传感器以进行里程计估计为应对各种环境条件提供了实用的解决方案。然而,这种方法也带来了计算需求,并引入了与每种传感器相关的特定问题。 虽然传感器融合可以弥补单个传感器的局限性,但融合过程本身需要大量工作。不加区别的传感器融合可能无法得到最优的里程计解决方案。因此,在部署传感器融合之前,全面规划和准确把握每个传感器的具体需求是至关重要的。
通用LiDAR Odometry框架设计
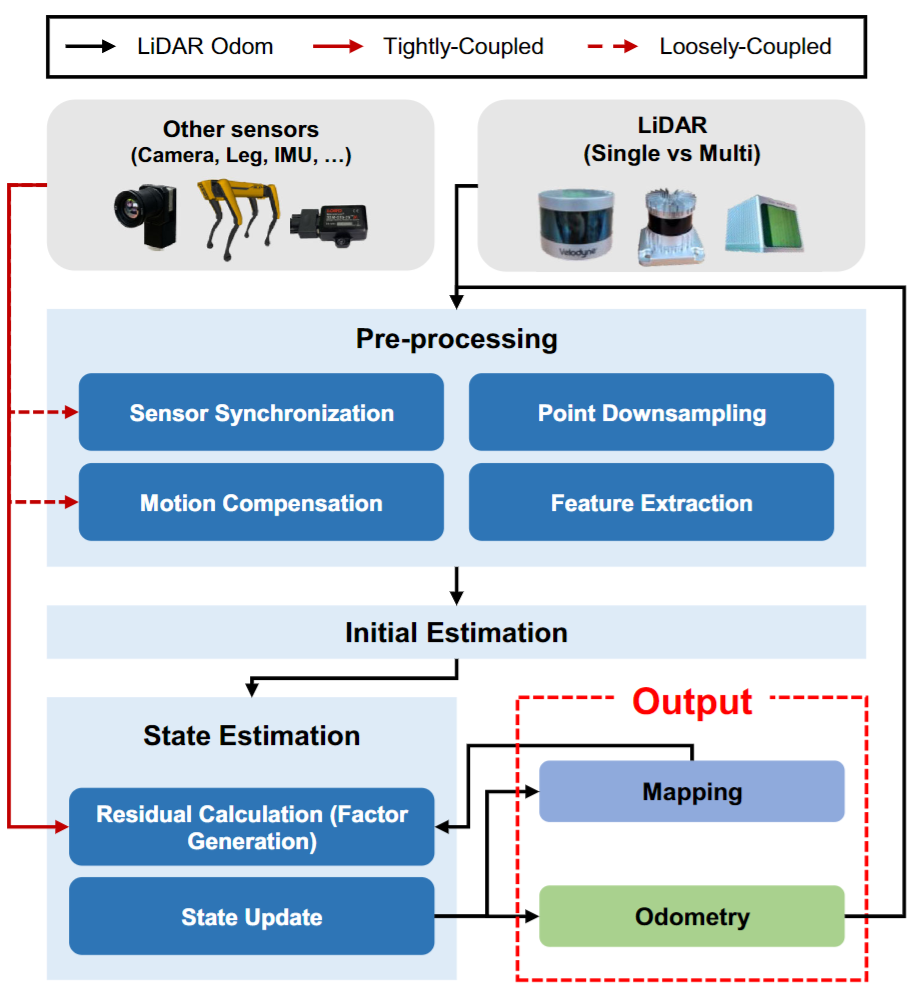
通用LiDAR Odometry pipeline设计
通过上图可以知道,通用LiDAR Odometry框架设计主要分为三部分,分别为:预处理,初始估计,状态估计。最终的输出形式有两种,分别为:定位和建图。预处理部分包括:传感器同步,降采样,运动补偿,特征提取;初始估计部分利用预处理的信息得到智能体的状态估计初值。状态估计部分则是利用初始估计或者地图模块的结果进行要优化,最终输出一个精确可靠的定位结果。

每日更新自动驾驶与机器人领域最新研究成果,星球内容包括:人形机器人,端到端自动驾驶,优秀论文深度透析,高精定位,大规模建图,三维重建,nerf与3DGS,感知与人工智能,规控决策等数十个领域优秀技术方案分享,点云配准、传感器标定、特征提取等工程性技术方案分享,行业招聘信息,国内外行业热点新闻
点击下方卡片
第一时间获取最热行业热点资讯,最新智驾机器人行业技术
原文地址:https://blog.csdn.net/techflowai/article/details/143027232
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!