ROS2 仿真学习02 Gazebo导入官方示例模型
1.下载模型
git clone https://gitee.com/bingda-robot/gazebo_models.git
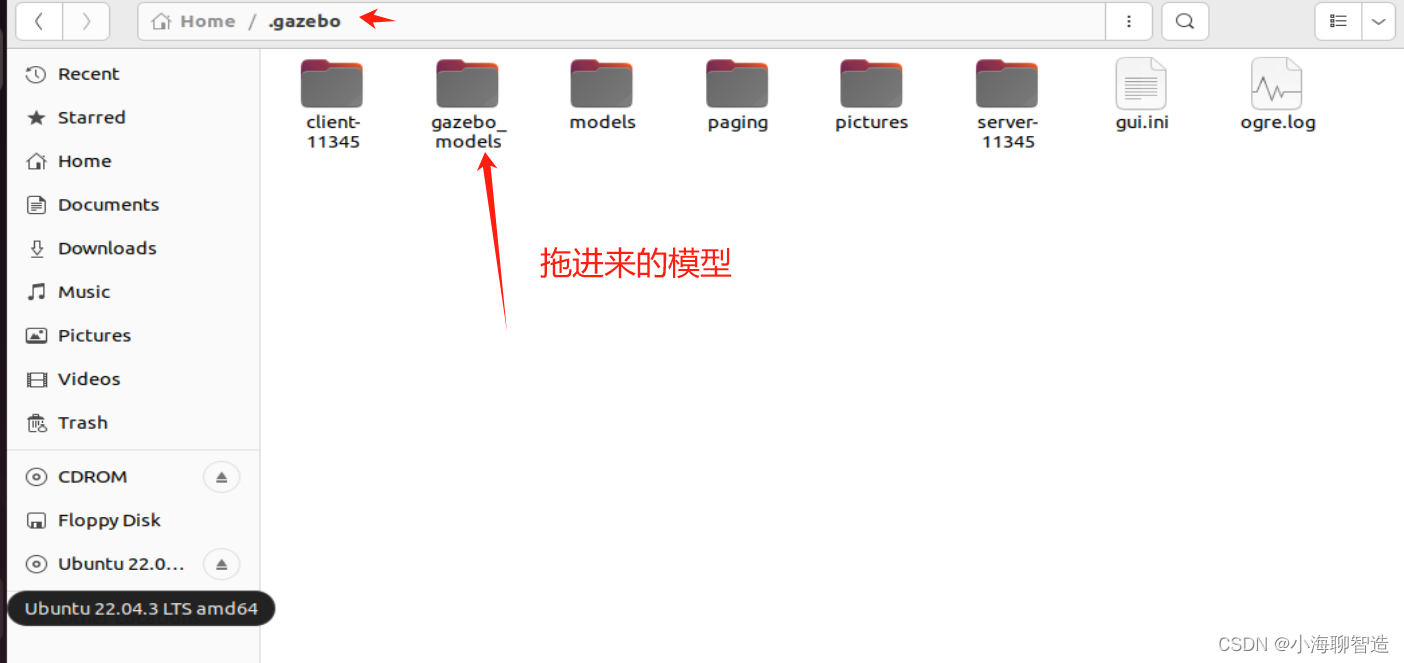
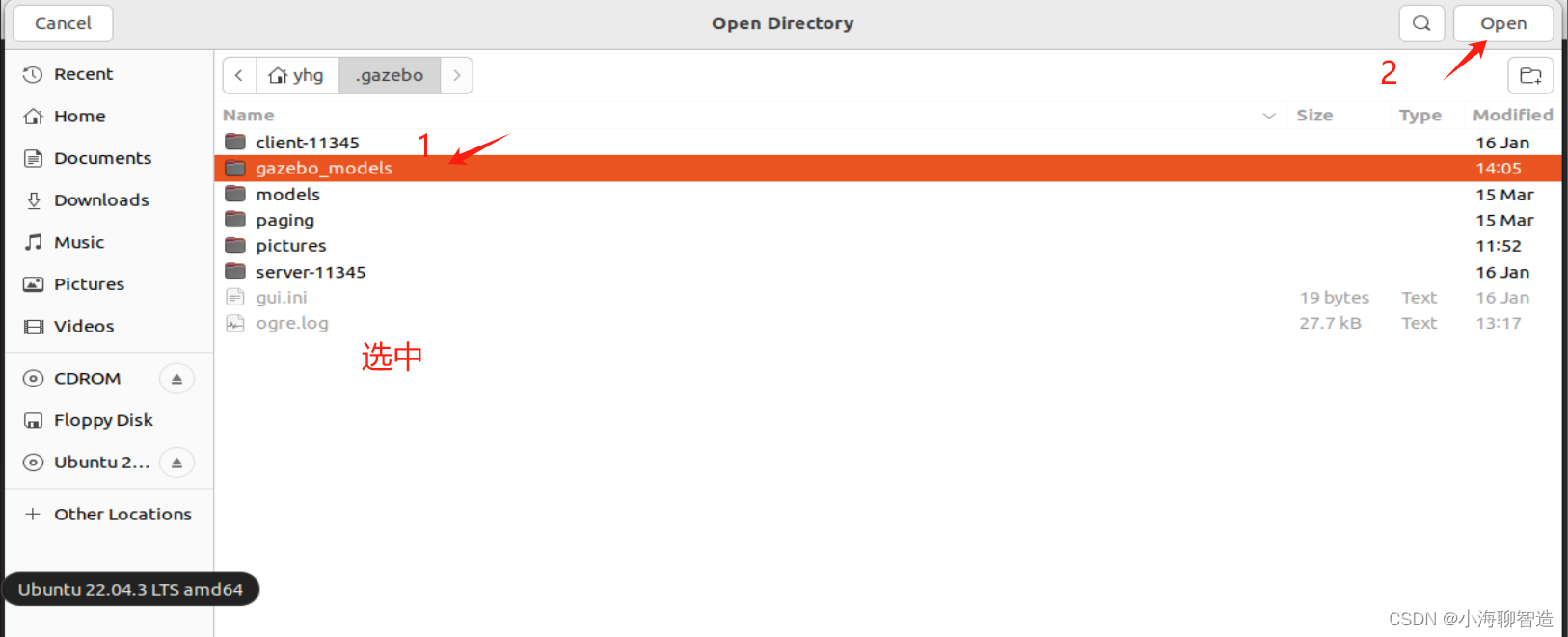
将gazebo_models拖到到.gazebo当中(如果没看到.gazebo文件请按住CTRL+h)
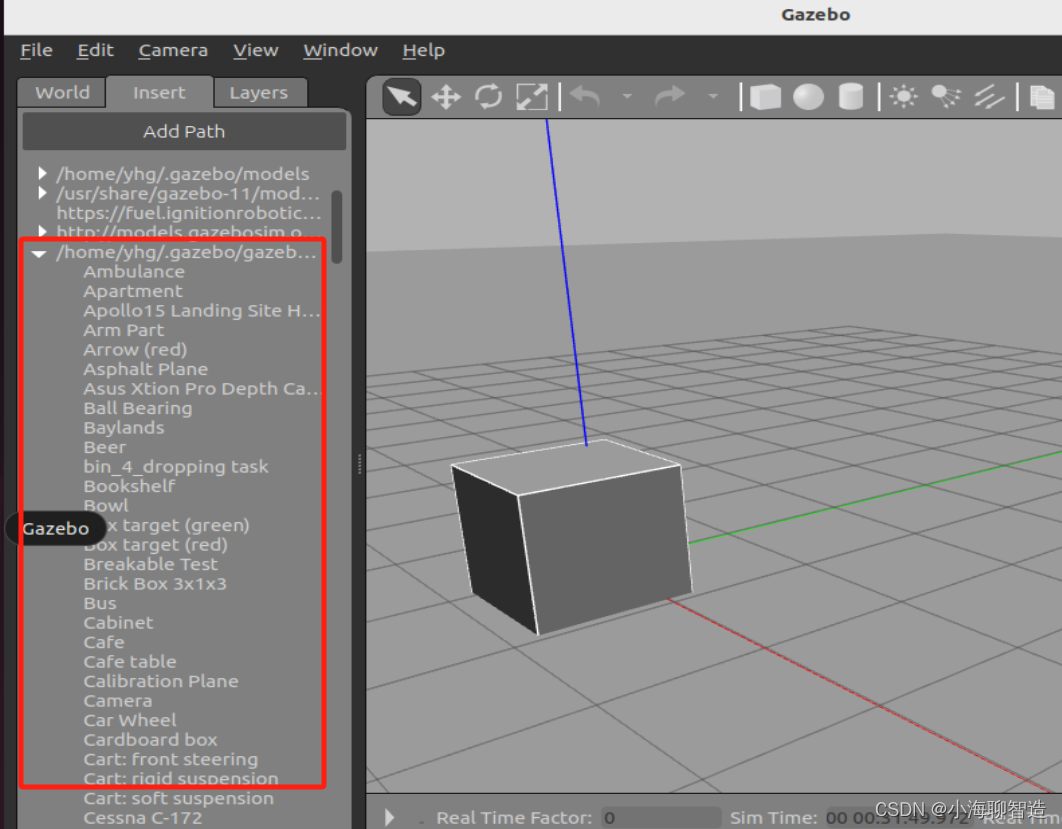
2.添加模型到gazebo的Insert
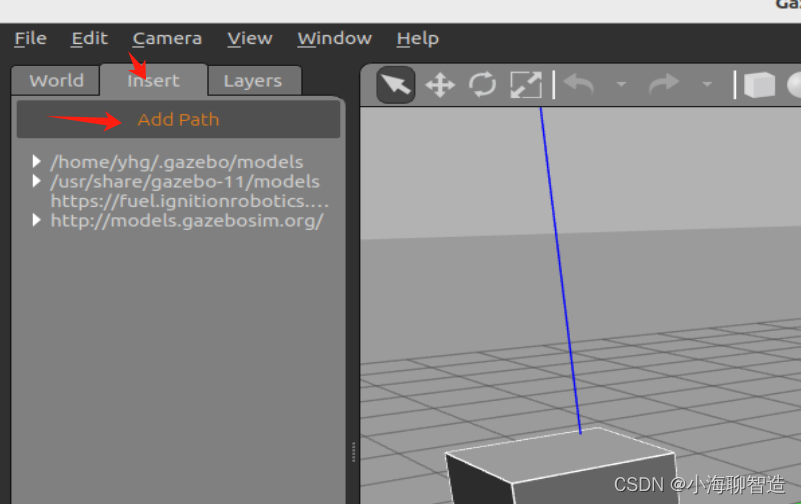
这就将官方示例的模型都导入到Gazebo 了
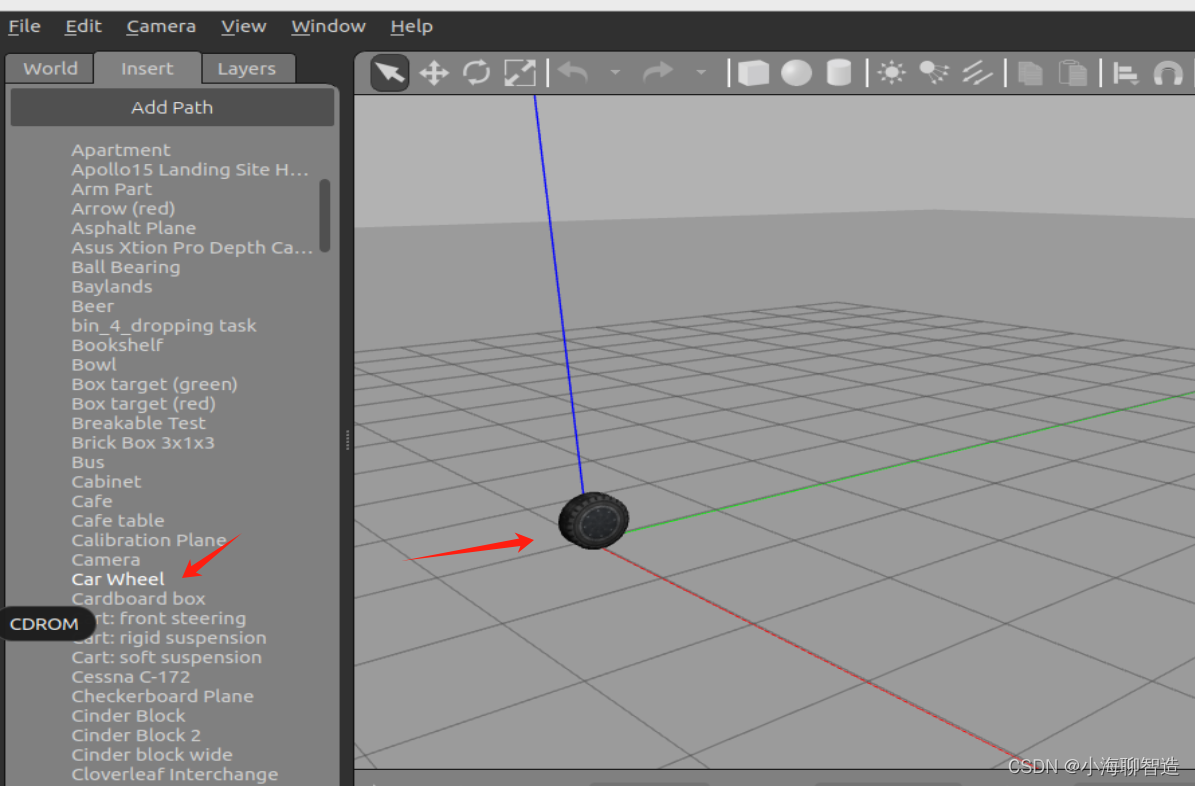
随便试试一个模型
原文地址:https://blog.csdn.net/hai411741962/article/details/137822776
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!