充电桩--移动充电机器人发展及技术路线(一)
聚焦光伏领域、深耕储能市场、探究充电技术
微信公众号:小Q下午茶

聚焦光伏领域,深耕储能市场,探究充电技术
47篇原创内容
公众号
序言
最近几天上海充电桩展览,许多充电桩企业纷纷参展,小Q发现有不少厂家都推出了移动充电机器人,展会中包括路特斯、黑马原力、蚕丛机器人、汇电能源、创睿等都亮相了自己的移动充电机器人。本文将从移动机器人的发展、技术路线、各公司产品参数介绍、市场驱动力、未来发展等方面介绍
一、移动充电机器人发展介绍
移动充电机器人,是一种可移动充电的智能化装备。该装备可以实现当电动车停入车位后,通过app或其他系统,即可让带有充电功能的机器人自动移动到车辆旁进行充电。移动充电机器人作为一种临时快速补电的方式,未来将与现有的固定式充电模式、换电模式、无线充电模式等形成互补,构建一个完善的电动汽车补能生态。
从发展历程来看,移动充电机器人起步于2015年左右,最早由特斯拉、大众提出,2020年开始有中国企业加入。截至2024年,中国参与企业已超40家,产品也实现了形式多样化和功能升级。
1、历史事件
2015年,特斯拉就曾发布一段自动机器人充电器的视频,视频中的充电器看上去像一条金属蛇。

2019 年上半年,大众宣布将在德国沃尔夫斯堡推出第一批移动充电站,从此移动充电设备开始进入人们视线。

2020年1月份,大众又提出一种概念机器人,可以把小型移动充电站拖到相应的车辆面前,并连接到汽车充电口上。这款充电机器人通过应用程序或Car-to-X通信启动。从充电到断电的整个过程均由充电机器人自主操作,包括带着移动储能电池去到需充电的汽车旁、打开电插座盖、连接插头、断开插头等。由此移动充电机器人的概念开始正式进入大众的视野。

2020年享奕科技推出基于创新性的高精度毫米级视觉定位技术研制出的固定式FA系列大功率直流快充机器人

作为国内优秀AGV小车解决方案提供商,2020年深圳动进智能科技有限公司提出自己的移动充电机器人概念,推出一款移动充电机器人。
2、国内外发展演进
(1)起步期:国外起步阶段(2015~2019)主要是由2015特斯拉研发的蛇形充电机器人,以及2019年大众发布的移动充电站。开启了移动机器人的概念。而国内只要是2020年享奕科技和深圳动进智能科技科技推出的移动机器人概念。
(2)发展期:国外发展阶段(2020~2022年)主要是大众、EV Safe Charge等企业推出的充电机器人,国内主要是远景、国网等为代表的能源公司,红旗、福龙马为代表的主机厂,找桩科技、始途科技为代表的科技类公司
(3)井喷期:国外发展阶段(2023年以后)国外科技公司开始布局包括博世、库卡、现代、Nyobolt等公司都推出不同款式的移动充电机器人,国内在头部企业的带动下,能源系统公司纷纷布局移动充电机器人,以拓展产品生态,解决车桩需求难题。
3、行业发展
移动充电机器人横跨自动驾驶、能源、机器人等多个领域。包括储能、自动驾驶、机械臂、运营平台等关键模块。目前移动充电机器人玩家主要来自主机厂、能源企业、机器人企业、科技公司等四类公司
(1)主机厂:主要包括汽车主机厂以及主机厂牵头的汽车tier1供应商,围绕给整车提供产品配套,实现车辆完整的配套服务。国外主机厂主要为大众、特斯拉、现代等。国内主机厂主要为红旗、路特斯、爱驰等
(2)能源企业:主要包含以能源企业为代表的上下游公司,电力公司、电芯厂家、储能企业、充电桩企业等。围绕提供能源延申服务,实现对服务能力的进一步完善。国外主要包含EV Safe Charge、Nyobolt等企业,国内主要包含黑马原力、远景、国轩、中能聪聪、国家电网等
(3)机器人企业:主要包含机器人公司、智能驾驶企业,依托机器人技术,研发制造移动充电机器人,实现业务场景的拓展和延伸。国外主要包括库卡。国内主要包括享奕科技、动进智能、蚕丛机器人等
(4)科技公司:主要以高科技技术创业型企业,依托创业资金支撑,研发制造移动充电机器人,实现公司技术转化产品落地。国外主要包括三星、博世等。国内主要包括找桩科技、始途科技等
二、技术路线介绍
2.1、技术分类
1、按照结构布局可以分为一体化、分离式、挂吊/平放协作机械臂式。
(1)一体化的充电机器人主要是指机器人底部为充电电源,上部为协作机械臂。这是电源与机器人一体化的一类充电机器人,类似于复合机器人,但此类机器人由于一体化的设计。电池容量相对会较小,

(2)分离式的充电机器人,充电机器人分为动力端和电池端两部分,动力端带有自动导航和CAR-X通信系统,可以牵引电池端至车辆所在位置、为其连接充电后离开,可以提升整体运营效率。如大众的Mobiler Laderoboter。

(3)挂吊/平放协作机械臂式的充电机器人,主要是指将协作机器人通过挂吊或与充电桩结合,从而让用户通过APP等操作平台即可完成充电的动作。通过协作机器人与充电桩的结合,实现新能源汽车自动充电,减少充电枪损耗,提升新能源车主的使用体验。

2、按照识别方式可以分为超声波、视觉识别、激光识别。类似现在的扫地机器人和智能割草机
3、按照外形可以分为固定式充电机器人、移动式自动充电机器人、抓抢式自动充电机器人、蛇形自动充电机器人。

图片:享奕科技
以蛇形机器人例
1976年蛇形机器人的研发就已经开始,但是市面上却没有相应的产品诞生。以特斯拉这款进行举例,蛇形机器人拥有长、柔性、自身形态可以是复杂曲线等特点,自由度就成为蛇形机器人的优势,但也造成了蛇形机器人难以实现工业应用的问题。其实就能理解为啥市面上目前没出现相应的产品。
特斯拉技术优势
-
精准地识别充电接口:准确的将充电枪插入充电接口,这其中涉及的技术与无人驾驶可以说是有异曲同工之处。主要是传感器技术,包括:
-
激光雷达用于三维环境映射和目标检测(让机器人进行定位,确定车与机器人本体的位置);
-
摄像头以每帧信息为基础进行检测、分类、分割等计算。整合信息进行目标跟踪,输出结果(确认充电口所在的位置);
-
3D摄像头捕获三维位置数据(与摄像头进行结合,将二维视觉数据和三维位置数据融合,能够精确地了解周围环境,从而进行精准定位)。
特斯拉技术缺点
-
特斯拉这条蛇形机器人使用了多达20个关节,大约20个自由度带来的除了高自由度,同时设计难度以及计算量成倍的增长。
-
固定难度增加,由于多节机械臂电机的承重随电机数目和到末端的距离是线性增长的,从根部数第二个电机既要承受相当大重量,又要保持体积,制作难度非常大。
-
在大负载增加摩擦的情况下,传动线和机器人连杆之间的摩擦将会对机器人的可靠性产生很大的影响,对机器人使用的材料提出很高的耐磨要求。
4、按照智能化程度可以分为手动充电机器人、半自动充电机器人、全自动机器人
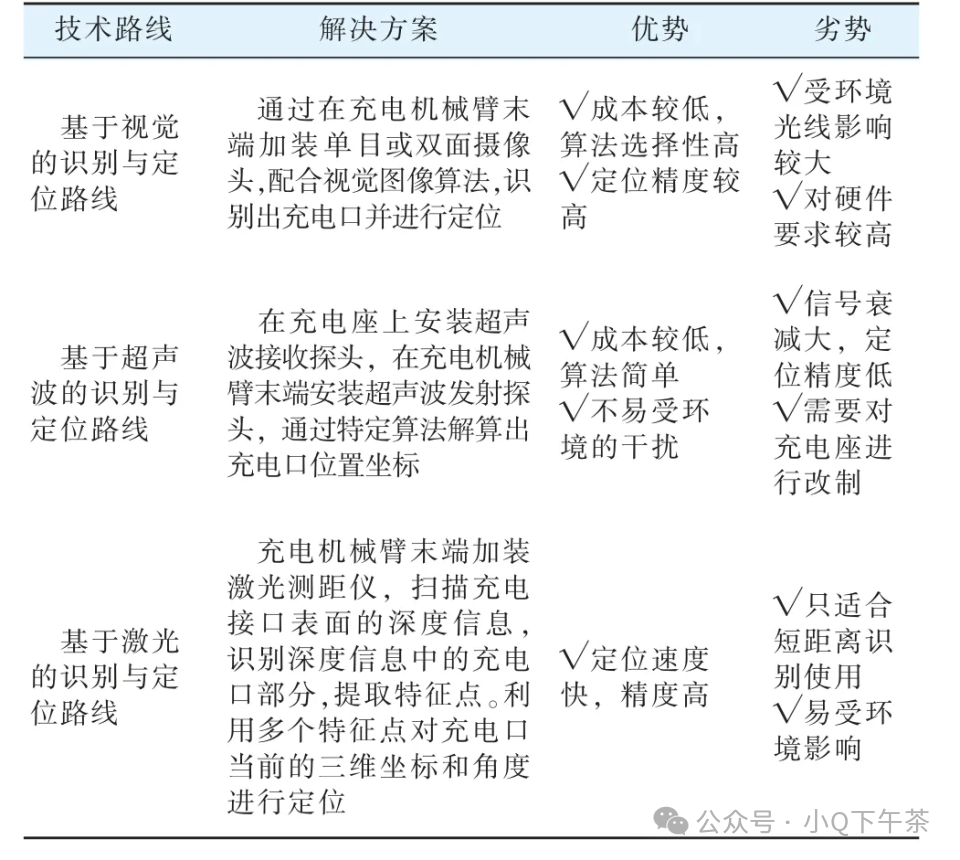
2.2、充电口技术识别
(1)工作原理
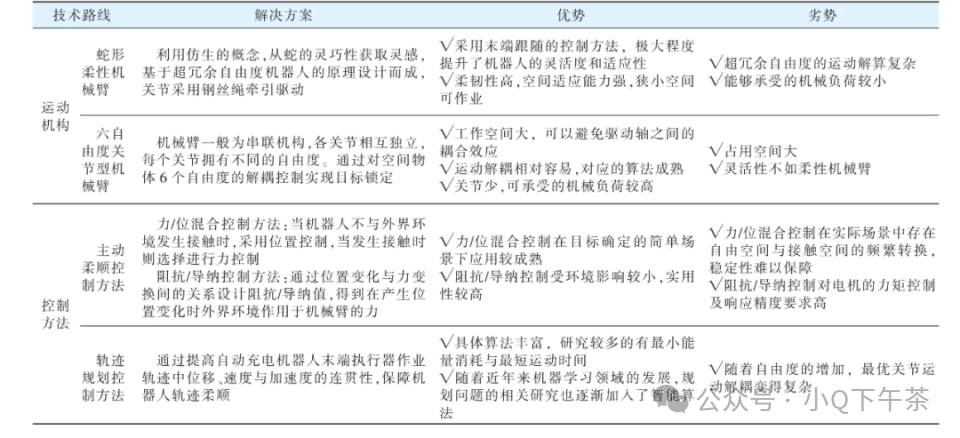
从工作原理上看,自动充电机器人技术并不复杂。主要由机械臂及运动控制算法、充电口感知系统及定位算法、充电枪及传导充电线束3部分组成。当车辆停好后,充电机器人通过感知系统定位充电口,机械臂根据充电口的坐标将充电枪头对准充电口,插接到位。在充电过程中,保持充电枪稳定连接状态,充满电后,机械臂进行拔枪操作,自动充电过程结束。
尽管工作原理虽然简单,但在考虑到实际应用场景之后,自动充电机器人想要大规模普及必须要突破两大关键技术问题。
-
复杂环境下充电口的精确识别与定位问题。如果电动汽车停靠的环境光线或者地理位置不佳,需要先进的图像识别与定位算法,帮助充电机器人更快更准确地找到充电座。
-
机械臂插拔过程中的柔顺性控制问题。电动汽车充电插座的安装位置和角度各不相同,如果控制不当,容易造成充电座及充电枪非正常磨损。因此,机械臂的柔顺性控制技术十分关键。
针对上述两项亟需突破的关键技术问题,不同的技术路线给出了差异化的解决方案。
(2)技术参数
精准度:充电口的定位精度应达到0.2mm,就是说机器人相对车辆的空间位姿精度达到0.2mm,角度也应达到0.1°。
顺畅度:充电枪的插拔过程要柔顺,不能发生卡死现象,这主要要求机器人做到类人的柔顺操作,减少充电枪的耗损。
插拔响应:从充电口定位到插拔完成时间小于30s,这是对插拔作业效率提出了要求。
可靠性:充电枪插拔成功率高于98%,这是对机器人的可靠性和稳定性的定义。
寿命:充电机器人的使用寿命高于8年。
插拔力:插拔力大于14kg,这是对机器人负载的最低要求。
环境工况:能够适应各种复杂环境,并能在-30℃甚至更低的环境下使用
END
备注:部分图片来源网络,仅供参考使用。
添加微信请备注:公司+姓名+职位

充电桩16
充电桩 · 目录
上一篇充电桩--交流充电桩硬件原理以及竞品方案下一篇充电桩--各家智能充电机器人介绍及未来发展趋势(二)
原文地址:https://blog.csdn.net/qianoocheng/article/details/140643399
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!