数据结构 第六章(图)【下】
写在前面:
- 本系列笔记主要以《数据结构(C语言版)》为参考(本章部分图片来源于王道),结合下方视频教程对数据结构的相关知识点进行梳理。所有代码块使用的都是C语言,如有错误欢迎指出。
- 视频链接:第01周a--前言_哔哩哔哩_bilibili
四、图的应用
1、最小生成树
(1)在一个连通网的所有生成树中,各边的代价(权值)之和最小的那棵生成树称为该连通网的最小代价生成树,简称为最小生成树。
(2)构造最小生成树有多种算法,其中多数算法利用了最小生成树的一种简称为MST的性质:假设N=(V, E)是一个连通网,U是顶点集V的一个非空子集,若(u, v)是一条具有最小权值(代价)的边,其中uϵU(已落在生成树上的顶点集)、vϵV-U(尚未落在生成树上的顶点集),则必存在一棵包含边(u, v)的最小生成树。
(3)普里姆算法:
①算法步骤:

②算法实现:
[1]辅助部分:
struct Closedge
{
VerTexType adjvex; //最小边在U中的那个顶点
ArcType lowcost; //最小边上的权值
}closedge[MVNum]; //辅助数组,用来记录从顶点集U到V-U的权值最小的边
int Min(Closedge *U, int n)
{
int min = INT_MAX;
int pos = 0;
for (int i = 0; i < n; ++i)
{
if (U[i].lowcost != 0 && U[i].lowcost < min)
{
//U[i].weight != 0 说明不在U中,即V-U
min = U[i].lowcost;
pos = i;
}
}
return pos;
}[2]核心部分:
void MiniSpanTree_Prim(AMGraph G, VerTexType u)
{
//无向网G以邻接矩阵形式存储,从顶点u触发构造G的最小生成树T,输出T的各条边
int k; //k为顶点u的下标
for (k = 0; k < G.vexnum; k++) //确定u在G中的位置,即顶点在G.vexs中的序号
{
if (u == G.vexs[k])
break;
}
for (int j = 0; j < G.vexnum; j++) //对V-U的每一个顶点初始化
{
if (j != k)
closedge[j] = { u,G.arcs[k][j] };
}
closedge[k].lowcost = 0; //U集中加入顶点u
for (int i = 1; i < G.vexnum; i++)
{
//选择其余n-1个顶点,生成n-1条边
k = Min(closedge, G.vexnum); //在V-U中选取权值最小的边
VerTexType u0 = closedge[k].adjvex; //u0为最小边的一个顶点,属于U
VerTexType v0 = G.vexs[k]; //v0位最小边的另一个顶点,属于V-U
printf("%c->%c ", u0, v0);
closedge[k].lowcost = 0; //第k个顶点并入U集
for (int j = 0; j < G.vexnum; j++)
{
if (G.arcs[k][j] < closedge[j].lowcost) //新顶点并入U后重新选择最小边
closedge[j] = { G.vexs[k],G.arcs[k][j] };
}
}
}③普里姆算法的时间复杂度为O(n2),与网中的边数无关,因此适用于求稠密网的最小生成树。
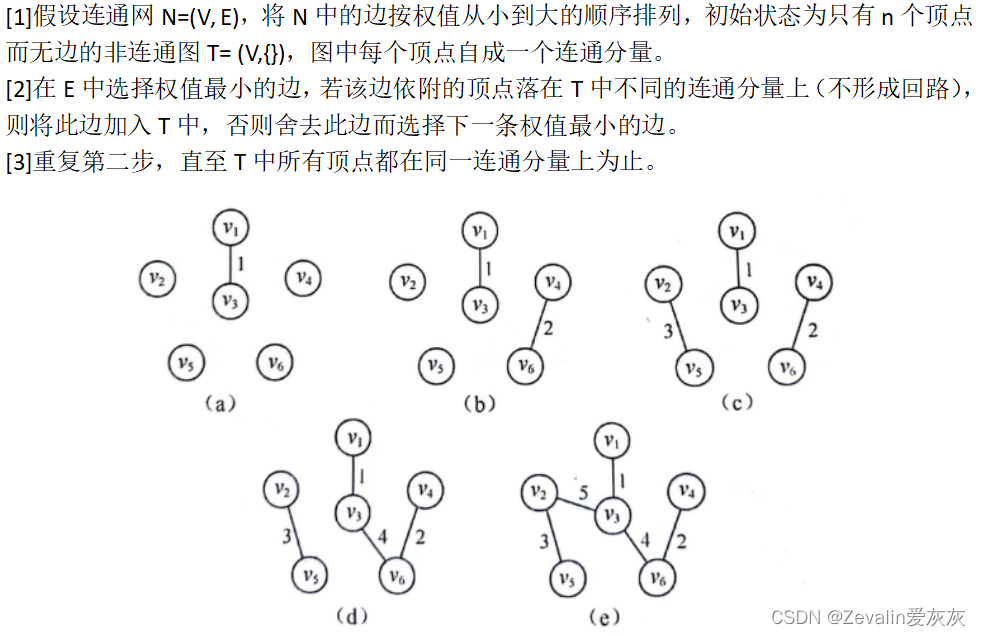
(4)克鲁斯卡尔算法:
①算法步骤:
②算法实现:
[1]辅助部分:
struct Edge
{
VerTexType Head; //边的始点
VerTexType Tail; //边的终点
ArcType lowcost; //边上的权值
}edge[MVNum]; //存储边的信息
int Vexset[MVNum]; //辅助数组
void Sort(Edge *E, int length) //采用冒泡排序将数组edge中的元素按权值从小到大排序
{
bool flag = true; //排序flag
for (int i = 0; i < length - 1 && flag; ++i) //如果未发生交换则说明有序
{
flag = false; //第一次设置为false,若某轮循环结束后标志仍为false,说明排序可以结束
for (int j = 0; j < length - 1 - i; ++j)
{
if (E[j].lowcost > E[j + 1].lowcost)
{
flag = true; //如果发生交换,标志为true
Edge temp = E[j];
E[j] = E[j + 1];
E[j + 1] = temp;
}
}
}
}[2]核心部分:
void MiniSpanTree_Kruskal(AMGraph G)
{
//无向网G以邻接矩阵形式存储,构造G的最小生成树T,输出T的各条边
Edge *edge = (Edge*)malloc(sizeof(Edge) * G.arcnum); //为G建立Edge数组
Edge *p = edge;
for (int i = 0; i < G.vexnum; i++) //初始化Edge数组(无向图遍历邻接矩阵的上三角即可)
{
for (int k = i + 1; k < G.vexnum; k++)
{
if (G.arcs[i][k] < MaxInt)
{
p->Head = G.vexs[i];
p->Tail = G.vexs[k];
p->lowcost = G.arcs[i][k];
p++;
}
}
}
Sort(edge, G.arcnum); //Edge中的元素按权值升序排序
for (int i = 0; i < G.arcnum; i++)
Vexset[i] = i; //辅助数组,表示各顶点自成一个连通分量
for (int i = 0; i < G.arcnum; i++)
{
int v1, v2;
for (v1 = 0; v1 < G.vexnum; v1++) //v1为边的始点Head的下标
if (edge[i].Head == G.vexs[v1])
break;
for (v2 = 0; v2 < G.vexnum; v2++) //v2为边的终点Tail的下标
if (edge[i].Tail == G.vexs[v2])
break;
int vs1 = Vexset[v1]; //获取边edge[i]的始点所在的连通分量vs1
int vs2 = Vexset[v2]; //获取边edge[i]的终点所在的连通分量vs2
if (vs1 != vs2) //边的两个顶点分属不同的连通分量
{
printf("%c->%c ", edge[i].Head, edge[i].Tail); //输出此边
for (int j = 0; j < G.vexnum; j++) //合并vs1和vs2两个分量,两个集合统一编号
if (Vexset[j] == vs2)
Vexset[j] = vs1; //集合编号为vs2的都改为vs1
}
}
}③克鲁斯卡尔算法的时间复杂度为,与网中的边数有关。与普里姆算法相比,克鲁斯卡尔算法更适合于求稀疏网的最小生成树。
2、最短路径
(1)在带权有向网中,习惯上称路径上的第一个顶点为源点,最后一个顶点为终点。
(2)求从某个源点到其余各顶点的最短路径——迪杰斯特拉算法:
①算法思路:

②算法步骤:

③算法实现:
void ShortestPath_DIJ(AMGraph G, int v0, int* path)
{
//用Dijkstra算法求有向网的v0顶点到其余顶点的最短路径
int n = G.vexnum; //G中顶点个数
int v;
bool* S = (bool*)malloc(sizeof(bool)*n);
ArcType* D = (ArcType*)malloc(sizeof(ArcType)*n);
for (v = 0; v < n; v++)
{
S[v] = false; //S初始为空集
D[v] = G.arcs[v0][v]; //将v0到各个终点的最短路径长度初始化为弧上的权值
if (D[v] < MaxInt)
path[v] = v0; //v0和v之间有弧,v的前驱置为v0
else
path[v] = -1; //v0和v之间无弧,v的前驱置为-1
}
S[v0] = true; //将v0加入S
D[v0] = 0; //源点到源点的距离为0
for (int i = 1; i < n; i++)
{
int min = MaxInt;
for (int j = 0;j < n;j++)
if (!S[j] && D[j] < min)
{
v = j;
min = D[j];
} //选择一条当前的最短路径,终点为v
S[v] = true; //将v加入S
for (int j = 0;j < n;j++) //更新从v0出发到集合V-S上所有顶点的最短路径长度
if (!S[j] && (D[v] + G.arcs[v][j] < D[j]))
{
D[j] = D[v] + G.arcs[v][j]; //更新D[j]
path[j] = v; //更新j的前驱为v
}
}
}④该算法的时间复杂度为O()。
⑤举例:

[1]对六个顶点依次初始化,结果如下:
| v | 0 | 1 | 2 | 3 | 4 | 5 |
| S | true | false | false | false | false | false |
| D | 0 | ∞ | 10 | ∞ | 30 | 100 |
| Path | -1 | -1 | 0 | -1 | 0 | 0 |
[2]从到各终点的最短路径长度D和最短路径的求解过程:


(3)求每一对顶点之间的最短路径——弗洛伊德算法:
①算法思路:逐个顶点试探,从到
的所有可能存在的路径中选出一条长度最短的路径。
②算法步骤:

③算法实现:
void ShortestPath_Floyd(AMGraph G, int** path)
{
//用Floyd算法求有向网G中各对顶点i和j之间的最短路径
bool* S = (bool*)malloc(sizeof(bool)*G.vexnum);
ArcType** D = (ArcType**)malloc(sizeof(ArcType*)*G.vexnum);
for (int i = 0; i < G.vexnum; i++)
{
D[i] = (ArcType*)malloc(sizeof(ArcType)*G.vexnum);
}
for (int i = 0; i < G.vexnum; i++) //初始化n阶方阵
{
for (int j = 0; j < G.vexnum; j++)
{
D[i][j] = G.arcs[i][j];
if (D[i][j] < MaxInt && i != j)
path[i][j] = i; //i和j之间有弧,j的前驱置为i
else
path[i][j] = -1; //i和j之间无弧,j的前驱置为-1
}
}
for (int k = 0; k < G.vexnum; k++)
for (int i = 0; i < G.vexnum; i++)
for (int j = 0; j < G.vexnum; j++)
if (D[i][k] + D[k][j] < D[i][j])
{ //从i经k到j的一条路径更短,更新D[i][j]和j的前驱
D[i][j] = D[i][k] + D[k][j];
path[i][j] = path[k][j];
}
}④该算法的时间复杂度为O()。
⑤举例:


3、拓扑排序
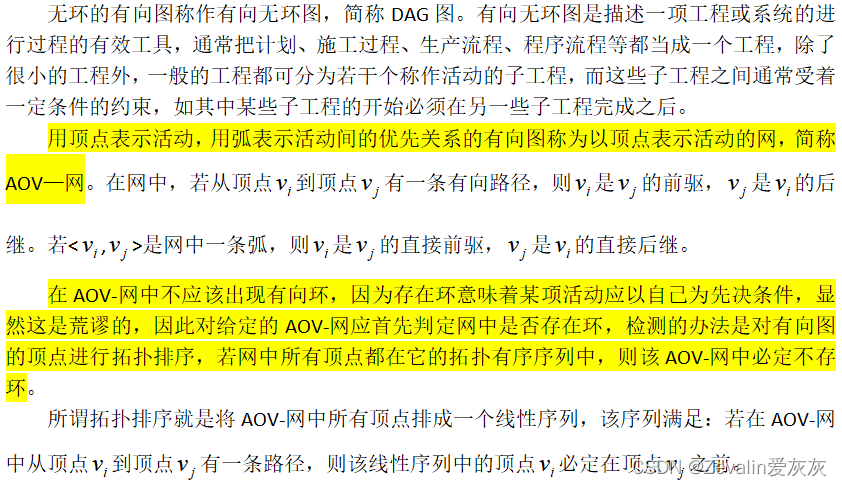
(1)AOV—网:
(2)拓扑排序的过程:

(3)拓扑排序算法实现:
Status TopologicalSort(ALGraph G, int topo[])
{
//有向图G采用邻接表作为存储结构
//若G无回路,则生成G的一个拓扑序列topo并返回OK,否则返回ERROR
int *indegree = (int*)malloc(sizeof(int)*G.vexnum); //存储所有顶点的入度的数组
memset(indegree, 0, sizeof(int)*G.vexnum); //初始化indegree数组,各顶点入度为0
for (int i = 0; i < G.vexnum; ++i) //分别对每个顶点求入度
{
ArcNode *p = G.vertices[i].firstarc; //指向首个邻接点
while (p)
{
indegree[p->adjvex]++; //入度+1
p = p->nextarc; //指向下一个邻接点
}
}
SqStack S;
InitStack(&S); //栈S初始化为空
for (int i = 0; i < G.vexnum; i++) //入度为0者进栈
if (!indegree[i])
Push(&S, i);
int m = 0; //对输出顶点计数
while (!StackEmpty(S))
{
int i;
Pop(&S, &i); //使栈顶顶点vi出栈
topo[m] = i; //将顶点vi保存在拓扑序列数组topo中
m++; //输出顶点数+1
ArcNode *p = G.vertices[i].firstarc; //指向vi的第一个邻接点
while (p)
{
int k = p->adjvex; //vk为vi的邻接点
indegree[k]--; //vi的每个邻接点的入度-1
if (indegree[k] == 0) //入度减为0,入栈
Push(&S, k);
p = p->nextarc; //指向下一个邻接点
}
}
if (m < G.vexnum) return ERROR;
else return OK;
}(4)有向无环图可以用于描述表达式,因为运算符有不同的优先级,需要完成高优先级的运算才能接着完成低优先级的运算。

4、关键路径
(1)AOE—网:
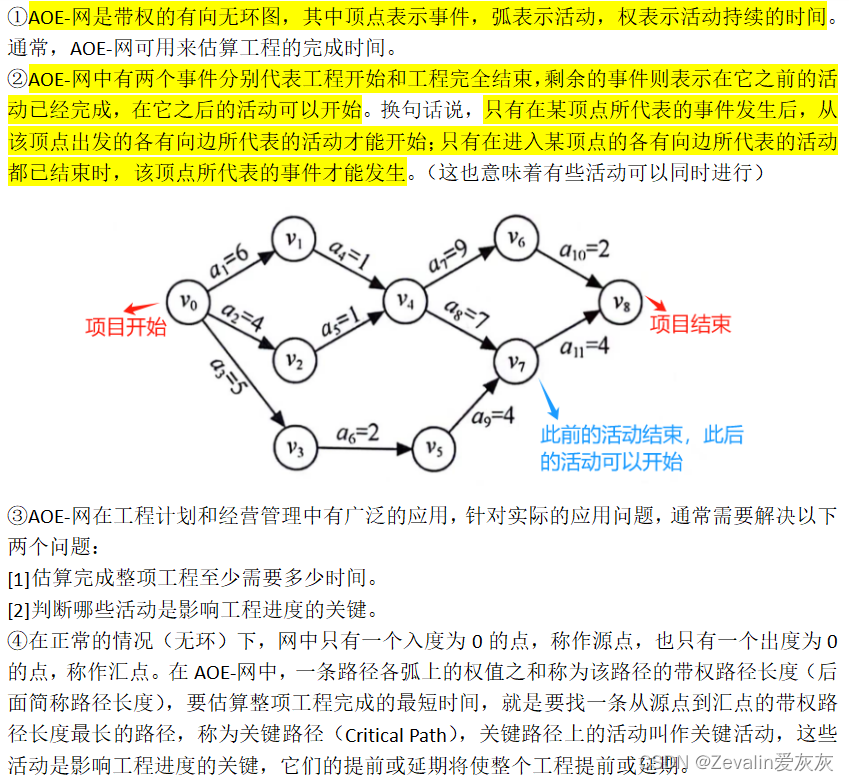
(2)关键路径求解过程:
①首先定义4个描述量:

②一个活动的最迟开始时间l(i)和其最早开始时间e(i)的差值是该活动完成的时间余量,它是在不增加完成整个工程所需的总时间的情况下,活动
可以拖延的时间。当一活动的时间余量为0时,说明该活动必须如期完成,否则就会拖延整个工期,所以称l(i)-e(i)=0的活动
是关键活动。
③对图中顶点进行排序,在排序过程中按拓扑序列求出每个事件的最早发生时间ve(i)。
④按逆拓扑序列求出每个事件的最迟发生时间vl(i)。
⑤求出每个活动的最早开始时间e(i)。
⑥求出每个活动的最晚开始时间(i)。
⑦找出e(i)=l(i)的活动,即关键活动,由关键活动形成的由源点到汇点的每一条路径就是关键路径(关键路径有可能不止一条)。

(3)关键路径算法实现:
Status CriticalPath(ALGraph G)
{
//G为邻接表存储的有向网,输出G的各项关键活动
int *topo = (int*)malloc(sizeof(int)*G.vexnum);
if (TopologicalSort(G, topo) == OK) //拓扑排序检查是否存在有向环,获取拓扑序列
return ERROR;
int *ve = (int*)malloc(sizeof(int*)*G.vexnum);
int *vl = (int*)malloc(sizeof(int*)*G.vexnum);
for (int i = 0; i < G.vexnum; i++)
ve[i] = 0; //给每个事件的最早发生时间置初值0
/*按拓扑次序求每个事件的最早发生时间*/
for (int i = 0; i < G.vexnum; i++)
{
int k = topo[i]; //取得拓扑序列中的顶点序号k
ArcNode* p = G.vertices[k].firstarc; //指向k的第一个邻接点
while (p)
{
int j = p->adjvex; //邻接顶点的序号
if (ve[j] < ve[k] + p->info) //更新顶点j的最早发生时间ve[j]
ve[j] = ve[k] + p->info;
p = p->nextarc; //指向k的下一个邻接点
}
}
for (int i = 0; i < G.vexnum; i++)
vl[i] = ve[G.vexnum - 1]; //给每个事件的最迟发生时间置初值ve[n-1]
/*按逆拓扑次序求每个事件的最晚发生时间*/
for (int i = G.vexnum - 1; i >= 0; i--)
{
int k = topo[i]; //取得拓扑序列中的顶点序号k
ArcNode* p = G.vertices[k].firstarc; //指向k的第一个邻接点
while (p)
{
int j = p->adjvex; //邻接顶点的序号
if (vl[k] < vl[j] + p->info) //更新顶点k的最迟发生时间vl[k]
vl[k] = vl[j] + p->info;
p = p->nextarc; //指向k的下一个邻接点
}
}
/*判断每一活动是否为关键活动*/
for (int i = 0; i < G.vexnum; i++)
{
ArcNode* p = G.vertices[i].firstarc; //指向i的第一个邻接点
while (p)
{
int j = p->adjvex; //邻接顶点的序号
int e = ve[i]; //计算活动的最早开始时间
int l = vl[j] - p->info; //计算活动的最晚开始时间
if (e == l) //若为关键活动,输出之
printf("%d-%d ", G.vertices[i].data, G.vertices[i].data);
p = p->nextarc; //指向i的下一个邻接点
}
}
}(4)使用该算法的注意事项:
①若网中有几条关键路径,则需加快同时在几条关键路径上的关键活动。
②如果一个活动处于所有的关键路径上,那么提高这个活动的速度就能缩短整个工程的完成时间。
③处于所有的关键路径上的活动完成时间缩短太多的话,可能会使原来的关键路径变为非关键路径,这时需要重新寻找关键路径。
五、算法设计举例
1、例1
(1)问题描述:分别以邻接矩阵和邻接表作为存储结构,实现无向网(使用邻接矩阵)/无向图(使用邻接表)的几个基本操作,分别为增加一个新顶点、删除一个顶点及其相关的边、增加一条边和删除一条边。
(2)代码:
①邻接矩阵部分:
Status InsertVex(AMGraph &G, VerTexType v) //增加一个新顶点v
{
if (G.vexnum == MVNum)
return OVERFLOW; //顶点数已达最大值
G.vexs[G.vexnum] = v;
for (int i = 0; i <= G.vexnum; i++) //仅增加顶点,不增加与其相关的边
{
G.arcs[i][G.vexnum] = MaxInt;
G.arcs[G.vexnum][i] = MaxInt;
}
G.vexnum++; //当前顶点数+1
return OK;
}
Status DeleteVex(AMGraph &G, VerTexType v) //删除顶点v及其相关的边
{
if (G.vexnum == 0)
return ERROR; //没有顶点可删
int i;
for (i = 0; i < G.vexnum; i++) //找到顶点v所在位置
{
if (G.vexs[i] == v)
break;
}
if (i != G.vexnum) //如果顶点v存在于图G中,可以进行删除(逻辑删除)
{
VerTexType tmp = G.vexs[i];
G.vexs[i] = G.vexs[G.vexnum - 1];
G.vexs[G.vexnum - 1] = tmp; //vexs中最后一个顶点与预删除顶点v互换存储位置
for (int j = 0; j < G.vexnum; j++) //矩阵中最后一个顶点与预删除顶点v的相关边互换存储位置
{
ArcType tmp = G.arcs[i][j];
G.arcs[i][j] = G.arcs[G.vexnum - 1][j];
G.arcs[G.vexnum - 1][j] = tmp;
tmp = G.arcs[j][i];
G.arcs[j][i] = G.arcs[j][G.vexnum - 1];
G.arcs[j][G.vexnum - 1] = tmp;
}
for (int j = 0; j < G.vexnum; j++) //如果是针对有向图的操作,则需要二维遍历
{
if (G.arcs[j][G.vexnum - 1] != MaxInt) //如果逻辑删除的边不是无穷大(也就是存在)
G.arcnum--; //边总数-1
}
G.vexnum--; //顶点总数-1
return OK;
}
else
return ERROR;
}
Status InsertArc(AMGraph &G, VerTexType v, VerTexType w, ArcType t) //增加一条边<v,w>
{
int i, j;
for (i = 0; i < G.vexnum; i++) //需要顶点v在G中存在,并找到其下标
{
if (G.vexs[i] == v)
break;
}
for (j = 0; j < G.vexnum; j++) //需要顶点w在G中存在,并找到其下标
{
if (G.vexs[j] == w)
break;
}
if (i != G.vexnum && j != G.vexnum && i != j && G.arcs[i][j] != MaxInt) //该边需要不存在才能增加
{
G.arcs[i][j] = t;
G.arcs[j][i] = t;
G.arcnum++; //边总数+1
return OK;
}
else
return ERROR;
}
Status DeleteArc(AMGraph &G, VerTexType v, VerTexType w) //删除一条边<v,w>
{
int i, j;
for (i = 0; i < G.vexnum; i++) //需要顶点v在G中存在,并找到其下标
{
if (G.vexs[i] == v)
break;
}
for (j = 0; j < G.vexnum; j++) //需要顶点w在G中存在,并找到其下标
{
if (G.vexs[j] == w)
break;
}
if (i != G.vexnum && j != G.vexnum && i != j && G.arcs[i][j] != MaxInt) //该边需要存在才能删除
{
G.arcs[i][j] = MaxInt;
G.arcs[j][i] = MaxInt;
G.arcnum--; //边总数-1
return OK;
}
else
return ERROR;
}②邻接表部分:
Status InsertVex(ALGraph &G, VerTexType v) //增加一个新顶点v
{
if (G.vexnum == MVNum)
return OVERFLOW; //顶点数已达最大值
G.vertices[G.vexnum].data = v;
G.vertices[G.vexnum].firstarc = NULL; //仅增加顶点,不增加与其相关的边
G.vexnum++; //当前顶点数+1
return OK;
}
Status DeleteVex(ALGraph &G, VerTexType v) //删除顶点v及其相关的边
{
if (G.vexnum == 0)
return ERROR; //没有顶点可删
int i;
for (i = 0; i < G.vexnum; i++) //找到顶点v所在位置
{
if (v == G.vertices[i].data)
break;
}
if (v != G.vexnum) //如果顶点v存在于图G中,可以进行删除(物理删除)
{
ArcNode* p = G.vertices[i].firstarc;
int num = 0;
while (p)
{
ArcNode* q1 = p;
p = p->nextarc;
ArcNode* q2 = G.vertices[q1->adjvex].firstarc;
ArcNode* q3 = q2;
if (q2->adjvex == i)
{
G.vertices[q1->adjvex].firstarc = q2->nextarc;
free(q3);
num++;
}
else
{
q2 = q2->nextarc;
while (q2)
{
if (q2->adjvex == G.vexnum - 1)
{
q2->adjvex = i;
}
else if (q2->adjvex == i)
{
ArcNode* q4 = q2;
q3->nextarc = q2->nextarc;
free(q4);
num++;
break;
}
q2 = q2->nextarc;
}
}
free(q1);
}
VNode tmp = G.vertices[i];
G.vertices[i] = G.vertices[G.vexnum - 1];
G.vertices[G.vexnum - 1] = tmp;
G.vexnum--; //顶点总数-1
G.arcnum = G.arcnum - num / 2; //如果是针对有向图的操作,num不需要除以2
return OK;
}
else
return ERROR;
}
Status InsertArc(ALGraph &G, VerTexType v, VerTexType w) //增加一条边<v,w>
{
int i, j;
for (i = 0; i < G.vexnum; i++) //需要顶点v在G中存在,并找到其下标
{
if (v == G.vertices[i].data)
break;
}
for (j = 0; j < G.vexnum; j++)
{
if (w == G.vertices[j].data) //需要顶点w在G中存在,并找到其下标
break;
}
if (i == G.vexnum || i == G.vexnum)
return ERROR;
ArcNode* p1 = (ArcNode*)malloc(sizeof(ArcNode));
p1->adjvex = j;
p1->nextarc = G.vertices[i].firstarc;
G.vertices[i].firstarc = p1;
ArcNode* p2 = (ArcNode*)malloc(sizeof(ArcNode));
p2->adjvex = i;
p2->nextarc = G.vertices[j].firstarc;
G.vertices[j].firstarc = p2;
G.arcnum++; //边总数+1
return OK;
}
Status DeleteArc(ALGraph &G, VerTexType v, VerTexType w) //删除一条边<v,w>
{
int i, j;
for (i = 0; i < G.vexnum; i++) //需要顶点v在G中存在,并找到其下标
{
if (v == G.vertices[i].data)
break;
}
for (j = 0; j < G.vexnum; j++) //需要顶点w在G中存在,并找到其下标
{
if (w == G.vertices[j].data)
break;
}
if (i == G.vexnum || i == G.vexnum)
return ERROR;
if (G.vertices[i].firstarc->adjvex == w)
{
ArcNode* p = G.vertices[i].firstarc;
G.vertices[i].firstarc = G.vertices[i].firstarc->nextarc;
free(p);
}
else
{
ArcNode* p1 = G.vertices[i].firstarc;
ArcNode* p2 = G.vertices[i].firstarc;
while (p2->nextarc)
{
if (p2->nextarc)
{
p1->nextarc = p2->nextarc;
break;
}
p1 = p2;
p2 = p2->nextarc;
}
}
if (G.vertices[j].firstarc->adjvex == v)
{
ArcNode* p = G.vertices[j].firstarc;
G.vertices[j].firstarc = G.vertices[j].firstarc->nextarc;
free(p);
}
else
{
ArcNode* p1 = G.vertices[j].firstarc;
ArcNode* p2 = G.vertices[j].firstarc;
while (p2->nextarc)
{
if (p2->nextarc)
{
p1->nextarc = p2->nextarc;
break;
}
p1 = p2;
p2 = p2->nextarc;
}
}
G.arcnum--; //边总数-1
return OK;
}2、例2
(1)问题描述:设计一个算法,求图G中距离顶点v的最短路径长度最大的一个顶点,设v可达其余各个顶点。
(2)代码:
int T1(AMGraph G, int v0)
{
int n = G.vexnum; //n为G中顶点的个数
bool S[MVNum];
int D[MVNum];
int Path[MVNum];
int v;
for (v = 0; v < n; v++) //n个顶点依次初始化
{
S[v] = false; //S初始为空集
D[v] = G.arcs[v0][v]; //将v0到各个终点的最短路径长度初始化为弧上的权值
if (D[v] != 0)
D[v] = MaxInt;
if (D[v] < MaxInt)
Path[v] = v0; //如果v0和v之间有弧,则将v的前驱置为v0
else
Path[v] = -1; //如果v0和v之间无弧,则将v的前驱置为-1
}
S[v0] = true; //将v0加入S
D[v0] = 0; //源点到源点的距离为0
//初始化结束,开始主循环,每次求得v0到某个顶点v的最短路径,将v加到S集
for (int i = 1; i < n; i++) //对其余n-1个原点依次进行计算
{
int min = MaxInt;
for (int w = 0; w < n; w++)
{
if (!S[w] && D[w] < min)
{
v = w;
min = D[w]; //选择一条当前的最短路径,终点为v
}
}
S[v] = true; //将v加入S
for (int w = 0; w < n; w++) //更新从v0出发到集合V-S上所有顶点的最短路径长度
{
if (!S[w] && (D[v] + G.arcs[v][w] < D[w]))
{
D[w] = D[v] + G.arcs[v][w]; //更新D[w]
Path[w] = v; //更改w的前驱为v
}
}
}
//最短路径求解完毕,设距离顶点v0的最短路径长度最大的一个顶点为m
int Max = D[0];
int m = 0;
for (int i = 1; i < n; i++)
if (Max < D[i]) m = i;
return m; //返回顶点下标
}3、例3
(1)问题描述:一个连通图采用邻接表作为存储结构,设计一个算法,实现从顶点v出发的深度优先遍历的非递归过程。
(2)代码:
void T2(ALGraph G, int v)
{
SqStack S;
InitStack(&S); //构造一个空栈
Push(&S, v); //顶点v进栈
while (!StackEmpty(S))
{
int k;
Pop(&S, &k); //栈顶元素k出栈
if (!visited_AL[k])
{
printf("%c ", k); //访问第k个节点
visited_AL[k] = true;
ArcNode* p = G.vertices[k].firstarc; //p指向k的边链表的第一个边节点
while (p != NULL) //边节点非空
{
int w = p->adjvex;
if (!visited_AL[w]) //如果k的邻接点未访问,则进栈
Push(&S, w);
p = p->nextarc;
}
}
}
}4、例4
(1)问题描述:基于图的深度优先搜索策略设计一算法,判别以邻接表方式存储的有向图中是否存在由顶点vi到顶点vj的路径(i≠j)。
(2)代码:
bool T3(ALGraph G, int i, int j)
{
if (i == j) //首尾相遇,说明存在路径,递归结束
return true;
else
{
visited_AL[i] = true; //访问第v个顶点,并置访问标志数组相应分量值为true
ArcNode* p = G.vertices[i].firstarc; //p指向v的边链表的第一个边节点
while (p != NULL) //边节点非空
{
int w = p->adjvex; //w是v的邻接点
p = p->nextarc; //p指向下一个边节点
if (!visited_AL[w] && T3(G, w, j))
return true;
}
}
return false;
}5、例5
(1)问题描述:采用邻接表存储结构,设计一个算法,判别无向图中任意给定的两个顶点之间是否存在一条长度为k的简单路径。
(2)代码:
bool T4(ALGraph G, int i, int j, int k)
{
if (i == j && k == 0) //找到符合要求的路径,递归结束
return true;
else if (k > 0)
{
visited_AL[i] = true; //访问第v个顶点,并置访问标志数组相应分量值为true
ArcNode* p = G.vertices[i].firstarc; //p指向v的边链表的第一个边节点
while (p != NULL) //边节点非空
{
int w = p->adjvex; //w是v的邻接点
p = p->nextarc; //p指向下一个边节点
if (!visited_AL[w] && T4(G, w, j, k - 1))
return true;
}
visited_AL[i] = false; //允许曾经被访问过的节点出现在另一条路径中
}
return false;
}原文地址:https://blog.csdn.net/Zevalin/article/details/137401348
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!