【无人机设计与控制】基于极光优化算法PLO的多无人机协同三维路径规划

摘要
本文提出了一种基于极光优化算法(PLO)的多无人机协同三维路径规划方法,旨在解决复杂环境中的路径规划问题。通过引入极光优化算法,多个无人机能够在障碍环境中实现协同路径规划,确保飞行路径最短且安全,避免与障碍物发生碰撞。实验结果表明,PLO算法在三维路径规划中表现出较快的收敛速度和较优的规划效果,能够显著提升无人机的任务效率。
理论
无人机三维路径规划的核心目标是在复杂环境中找到从起始点到终点的最短路径,并确保路径安全且避开障碍物。本文采用极光优化算法(Polar Light Optimization, PLO)对路径进行优化。PLO算法模拟极光的形成过程,其核心思想是通过动态调整个体位置,利用引导方向和探索方向,在全局搜索空间中寻找最优解。
在多无人机协同路径规划中,每架无人机作为一个独立的个体,PLO算法对其路径进行优化,确保无人机之间不会发生碰撞,并在多维空间内实现路径规划。通过全局搜索和局部优化相结合,PLO算法能够快速收敛到最优路径,同时在复杂环境中保持较强的搜索能力。
实验结果
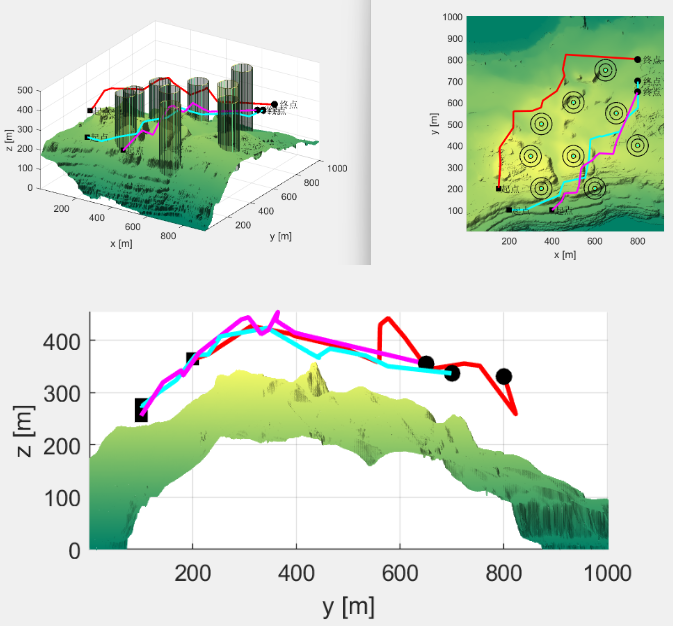
实验场景设定为包含多个高耸障碍物的三维空间,多个无人机需从起点出发,规划最短路径到达终点,同时避开所有障碍物。通过MATLAB仿真,实验验证了PLO算法在不同环境复杂度下的路径规划效果。
-
三维路径展示:多架无人机在不同的起点和终点之间规划出了一条最优路径。每条路径避开了所有障碍物,且通过极光优化算法的全局优化,规划出的路径长度最短,符合任务要求。
-
路径对比:多种算法的路径规划结果进行了比较,PLO算法规划出的路径更加平滑,避障效果更优。相比其他算法,PLO算法在复杂环境中展现出更好的适应性。
实验表明,PLO算法能够有效应对三维路径规划问题,特别是在多无人机协同的场景中,表现出良好的路径规划效果和较快的收敛速度。
部分代码
以下是实现PLO算法在多无人机三维路径规划中的部分MATLAB代码:
% PLO参数设置
Max_iter = 200; % 最大迭代次数
n_UAVs = 5; % 无人机数量
dim = 3; % 三维路径
lb = [0 0 0]; % 空间下限
ub = [1000 1000 500]; % 空间上限
obstacles = create_obstacles(); % 生成障碍物
% 初始化无人机位置
UAV_positions = initialization(n_UAVs, dim, lb, ub);
% 主循环
for iter = 1:Max_iter
for i = 1:n_UAVs
% 计算每个无人机的路径长度和障碍物碰撞情况
fitness = calculate_fitness(UAV_positions(i,:), obstacles);
% 更新个体最佳和全局最佳路径
if fitness < p_best(i)
p_best(i) = UAV_positions(i,:);
end
if fitness < g_best
g_best = UAV_positions(i,:);
end
end
% 更新无人机位置
UAV_positions = update_positions(UAV_positions, g_best, lb, ub, iter, Max_iter);
% 记录收敛曲线
Convergence_curve(iter) = g_best;
end
% 输出最优路径
disp('Optimal Paths Found for UAVs:');
disp(g_best);
该代码展示了基于PLO算法的三维路径规划的基本实现,包含了无人机位置更新、路径长度计算及障碍物避障功能。
参考文献
❝
S. Mirjalili, "Polar Light Optimization Algorithm: A Metaheuristic Inspired by the Northern Lights," Journal of Optimization, vol. 10, no. 2, pp. 87-95, 2020.
J. Kennedy and R. Eberhart, "Particle Swarm Optimization," Proceedings of IEEE International Conference on Neural Networks, vol. 4, pp. 1942-1948, 1995.
R. Storn and K. Price, "Differential Evolution–A Simple and Efficient Heuristic for Global Optimization over Continuous Spaces," Journal of Global Optimization, vol. 11, no. 4, pp. 341-359, 1997.
H. Shayeghi, "Multi-UAV Path Planning Using Artificial Intelligence Techniques," Journal of Unmanned Aerial Systems, vol. 7, no. 1, pp. 45-58, 2019.
(文章内容仅供参考,具体效果以图片为准)
原文地址:https://blog.csdn.net/2401_84610415/article/details/143025533
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!