VINS-FUSION 优化-视觉误差因子
一、视觉误差因子
VINS-FUSION 优化问题可以统一用损失函数表示如下: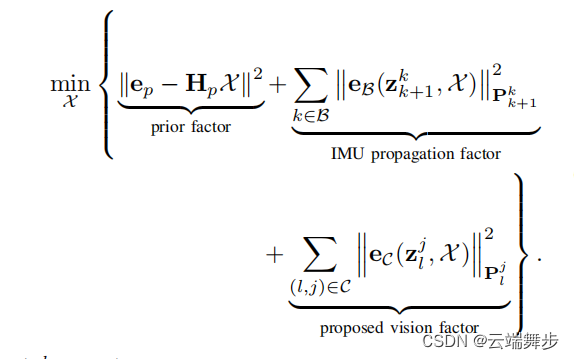
式中,包括先验误差因子(滑窗边缘化产生),IMU预积分误差因子,视觉误差因子。本文将结合论文和对应源码详细叙述。
在经典的视觉slam算法中,视觉误差通常用重投影误差表示。
重投影误差:指的真实三维空间点在图像平面上的投影(也就是图像上的像素点)和重投影(其实是用我们的计算值得到的虚拟的像素点)的差值。
在计算重投影误差时,有两种特征参数化方式:特征点3D位置和特征点深度/逆深度。
1.特征点3D位置

其中:3D位置;
表示特征点l在第k帧中的观测;
相机在global位姿;
表示相机重投影模型,将3D特征点去畸变。
2.深度/逆深度
从第i帧到j帧重投影误差可以表示如下:

其中:表示第i帧深度;
实质上两者是一致的,可以相互转化。
可以把看成是i帧特征在global位姿,计算如下:
二、vins-fusion源码中视觉误差因子
1.求视觉残差(重投影误差)
bool ProjectionFactor::Evaluate(double const *const *parameters, double *residuals, double **jacobians) const {
TicToc tic_toc;
Eigen::Vector3d Pi(parameters[0][0], parameters[0][1], parameters[0][2]);
Eigen::Quaterniond Qi(parameters[0][6], parameters[0][3], parameters[0][4], parameters[0][5]);
Eigen::Vector3d Pj(parameters[1][0], parameters[1][1], parameters[1][2]);
Eigen::Quaterniond Qj(parameters[1][6], parameters[1][3], parameters[1][4], parameters[1][5]);
Eigen::Vector3d tic(parameters[2][0], parameters[2][1], parameters[2][2]);
Eigen::Quaterniond qic(parameters[2][6], parameters[2][3], parameters[2][4], parameters[2][5]);
double inv_dep_i = parameters[3][0];
Eigen::Vector3d pts_camera_i = pts_i / inv_dep_i;
Eigen::Vector3d pts_imu_i = qic * pts_camera_i + tic;
Eigen::Vector3d pts_w = Qi * pts_imu_i + Pi;
Eigen::Vector3d pts_imu_j = Qj.inverse() * (pts_w - Pj);
Eigen::Vector3d pts_camera_j = qic.inverse() * (pts_imu_j - tic);
Eigen::Map<Eigen::Vector2d> residual(residuals);
#ifdef UNIT_SPHERE_ERROR
residual = tangent_base * (pts_camera_j.normalized() - pts_j.normalized());
#else
double dep_j = pts_camera_j.z();
residual = (pts_camera_j / dep_j).head<2>() - pts_j.head<2>();
#endif
...
}其中:Pi,Qi表示i帧位姿,对应公式为;
Pj,Qj表示i帧位姿,对应公式为;
tic,qic表示外参,对应公式为;
inv_dep_i 表示特征点l的逆深度值;
pts_i表示为该特征点在第i帧被观测到;
pts_j表示为该特征点在第j帧被观测到;
pts_i,pts_j表示为global的特征点被i, j帧同时观测到,是同一个global的特征点。
将上述代码转译成公式如下:
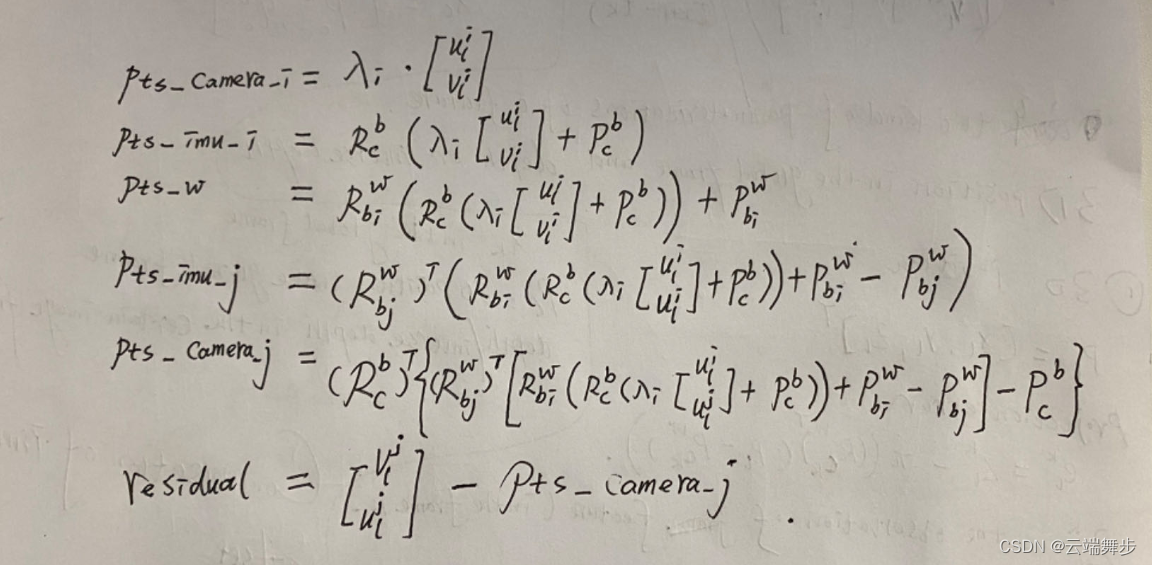
对比如下公式:

其实就是上述深度/逆深度参数,从第i帧到j帧重投影误差公式的展开形式。
2.雅可比矩阵
残差对优化变量的雅可比矩阵。
残差:
z_j = pts_camera_j.z();
residual = (pts_camera_j / z_j ).head<2>() - pts_j_td.head<2>();
优化变量:
,
,
,
根据链式求导法则:
其中:
(1)残差对p的雅可比矩阵
(2)残差对的雅可比矩阵

(3)残差对的雅可比矩阵

(3)残差对的雅可比矩阵

(4)残差对的雅可比矩阵

雅克比矩阵对应源码:
bool ProjectionFactor::Evaluate(double const *const *parameters, double *residuals, double **jacobians) const {
...
#ifdef UNIT_SPHERE_ERROR
residual = tangent_base * (pts_camera_j.normalized() - pts_j.normalized());
#else
double dep_j = pts_camera_j.z();
residual = (pts_camera_j / dep_j).head<2>() - pts_j.head<2>();
#endif
residual = sqrt_info * residual;
if (jacobians) {
Eigen::Matrix3d Ri = Qi.toRotationMatrix();
Eigen::Matrix3d Rj = Qj.toRotationMatrix();
Eigen::Matrix3d ric = qic.toRotationMatrix();
Eigen::Matrix<double, 2, 3> reduce(2, 3);
#ifdef UNIT_SPHERE_ERROR
double norm = pts_camera_j.norm();
Eigen::Matrix3d norm_jaco;
double x1, x2, x3;
x1 = pts_camera_j(0);
x2 = pts_camera_j(1);
x3 = pts_camera_j(2);
norm_jaco << 1.0 / norm - x1 * x1 / pow(norm, 3), - x1 * x2 / pow(norm, 3), - x1 * x3 / pow(norm, 3),
- x1 * x2 / pow(norm, 3), 1.0 / norm - x2 * x2 / pow(norm, 3), - x2 * x3 / pow(norm, 3),
- x1 * x3 / pow(norm, 3), - x2 * x3 / pow(norm, 3), 1.0 / norm - x3 * x3 / pow(norm, 3);
reduce = tangent_base * norm_jaco;
#else
reduce << 1. / dep_j, 0, -pts_camera_j(0) / (dep_j * dep_j),
0, 1. / dep_j, -pts_camera_j(1) / (dep_j * dep_j);
#endif
reduce = sqrt_info * reduce;
if (jacobians[0]) {
Eigen::Map<Eigen::Matrix<double, 2, 7, Eigen::RowMajor>> jacobian_pose_i(jacobians[0]);
Eigen::Matrix<double, 3, 6> jaco_i;
jaco_i.leftCols<3>() = ric.transpose() * Rj.transpose();
jaco_i.rightCols<3>() = ric.transpose() * Rj.transpose() * Ri * -Utility::skewSymmetric(pts_imu_i);
jacobian_pose_i.leftCols<6>() = reduce * jaco_i;
jacobian_pose_i.rightCols<1>().setZero();
}
if (jacobians[1]) {
Eigen::Map<Eigen::Matrix<double, 2, 7, Eigen::RowMajor>> jacobian_pose_j(jacobians[1]);
Eigen::Matrix<double, 3, 6> jaco_j;
jaco_j.leftCols<3>() = ric.transpose() * -Rj.transpose();
jaco_j.rightCols<3>() = ric.transpose() * Utility::skewSymmetric(pts_imu_j);
jacobian_pose_j.leftCols<6>() = reduce * jaco_j;
jacobian_pose_j.rightCols<1>().setZero();
}
if (jacobians[2]) {
Eigen::Map<Eigen::Matrix<double, 2, 7, Eigen::RowMajor>> jacobian_ex_pose(jacobians[2]);
Eigen::Matrix<double, 3, 6> jaco_ex;
jaco_ex.leftCols<3>() = ric.transpose() * (Rj.transpose() * Ri - Eigen::Matrix3d::Identity());
Eigen::Matrix3d tmp_r = ric.transpose() * Rj.transpose() * Ri * ric;
jaco_ex.rightCols<3>() = -tmp_r * Utility::skewSymmetric(pts_camera_i) + Utility::skewSymmetric(tmp_r * pts_camera_i) +
Utility::skewSymmetric(ric.transpose() * (Rj.transpose() * (Ri * tic + Pi - Pj) - tic));
jacobian_ex_pose.leftCols<6>() = reduce * jaco_ex;
jacobian_ex_pose.rightCols<1>().setZero();
}
if (jacobians[3]) {
Eigen::Map<Eigen::Vector2d> jacobian_feature(jacobians[3]);
#if 1
jacobian_feature = reduce * ric.transpose() * Rj.transpose() * Ri * ric * pts_i * -1.0 / (inv_dep_i * inv_dep_i);
#else
jacobian_feature = reduce * ric.transpose() * Rj.transpose() * Ri * ric * pts_i;
#endif
...
}其中:
reduce与相对应;
jacobians[0]与相对应;
jacobians[1]与相对应;
jacobians[2]与相对应;
jacobians[3]与相对应。
3.协方差
视觉约束的噪声协方差与标定相机内参的重投影误差相关。即视觉约束的噪声协方差可以根据标定内参时重投影误差来取定。代码中选取的是偏移1.5个像素,对应到归一化相机平面的协方差矩阵需要除以焦距f。而信息矩阵sqrt_info等于协方差矩阵的逆,如下:
sqrt_info = FOCAL_LENGTH / 1.5 * Matrix2d::Identity();至此,论文公式和源码就一一对应起来了。
三、参考
1.VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator
2.Online Temporal Calibration for Monocular Visual-Inertial Systems
3.https://github.com/HKUST-Aerial-Robotics/VINS-Fusion
原文地址:https://blog.csdn.net/u010196944/article/details/135627444
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!