OpenCV 学习笔记2 C++
1.图像直方图
直方图(Histogram)是图像处理中常用的工具,它表示图像中每个像素强度值的分布情况。在OpenCV中,可以使用 cv::calcHist 函数来计算图像的直方图。
图像直方图是一种展示图像像素强度分布的统计图表。它显示了图像中每个像素强度值的频率,有助于分析图像的亮度、对比度和色调等特征。以下是图像直方图的一些主要作用:
1.亮度和对比度分析: 直方图可以用于分析图像的整体亮度和对比度。通过观察直方图的形状,可以了解图像中亮度的分布情况,从而调整图像的亮度和对比度,使其更符合需求。
2.图像增强: 直方图均衡化是一种常见的图像增强方法,通过调整图像的直方图,使其更均匀地分布在整个灰度范围内,从而增强图像的细节和对比度。
3.颜色分析: 对于彩色图像,可以对每个颜色通道分别绘制直方图,以了解图像中各个颜色通道的分布情况。这对于颜色校正和调整非常有帮助。
4.阈值选择: 直方图可以帮助选择图像的二值化阈值。通过观察直方图的波峰和波谷,可以找到合适的阈值,将图像转换为二值图像。
5.检测图像质量问题: 异常的直方图形状可能指示图像质量问题,例如曝光不足或曝光过度。通过检查直方图,可以识别并纠正这些问题。
void TestDemo::histogram_demo(Mat& image)
{
//创建一个白色底板的图像
Mat img = Mat::zeros(Size(512,512),CV_8UC3);
img = Scalar(255,255,255);
//绘制直方图
Mat gray;
cvtColor(img,gray,COLOR_BGR2GRAY);//将图像转化为灰度图
int histSize=256;//直方图尺寸
float range[]={0,256};//像素值范围
const float* histRange={range};
Mat hist;
//we compute the histogram from the 0-th channel
int channels[]={0,1};
calcHist(&gray,1,channels,Mat(),hist,1,&histSize,&histRange,true,false);//计算直方图 Mat()不使用mask true->the histogram is uniform
//第一个1代表Number of source images 第二个1代表Histogram dimensionality that must be positive and not greater than CV_MAX_DIMS (equal to 32 in the current OpenCV version).
//hist :Output histogram, which is a dense or sparse dims -dimensional array
int hist_w = 512;
int hist_h = 400;
int bin_w = cvRound((double)hist_w/histSize);// 直方图每条的宽度,cvRound 取整
Mat histImage(hist_h,hist_w,CV_8UC3,Scalar(255,255,255));//Mat 高宽 创建直方图图像
normalize(hist,hist,0,histImage.rows,NORM_MINMAX,-1,Mat());//直方图归一化
for(int i=1;i<histSize;i++)
{
line(histImage,Point(bin_w*(i-1),hist_h-cvRound(hist.at<float>(i-1))),Point(bin_w*(i),hist_h-cvRound(hist.at<float>(i))),Scalar(0,0,0),2,LINE_8,0);//绘制直方图
}
namedWindow("histogram_demo",WINDOW_AUTOSIZE);
imshow("histogram_demo",histImage);
}
2.二维直方图
二维直方图是在图像处理中用于描述两个变量(通常是图像的两个通道)之间关系的直方图。在图像处理中,最常见的是彩色图像的二维直方图,其中横轴和纵轴分别表示两个颜色通道。
以下是二维直方图的一些主要特点和应用:
1 颜色分布: 对于彩色图像,二维直方图可以显示不同颜色通道之间的关系。例如,对于RGB图像,横轴和纵轴可以分别表示红色和绿色通道,通过颜色在直方图中的分布,可以了解图像中不同颜色的占比。
2 色调相关性: 二维直方图可以用于分析图像中颜色通道之间的相关性。通过观察直方图的形状,可以了解图像中颜色的相关性,从而更好地理解图像的色调。
3 色彩校正: 通过分析二维直方图,可以识别和调整图像中不同通道的色彩偏差。这对于颜色校正非常有帮助,确保图像的颜色表现准确。
4 图像分割: 二维直方图在图像分割中有广泛的应用。通过选择合适的阈值,可以将图像分割成不同的区域,从而实现物体的检测和识别。
5 通道选择: 通过分析二维直方图,可以确定哪些颜色通道对于特定任务最为重要。这对于图像特征提取和图像识别非常有帮助。
minMaxLoc
minMaxLoc()函数 是 OpenCV 库中的一个函数,用于找到一个多维数组中的最小值和最大值,以及它们的位置。
void minMaxLoc(InputArray src, double* minVal, double* maxVal=0, Point* minLoc=0, Point* maxLoc=0, InputArray mask=noArray());
src:输入数组或者向量,必须包含至少一个元素。
minVal:可选的输出参数,用于存储最小值的实际值。如果不需要这个值,可以设为0。
maxVal:可选的输出参数,用于存储最大值的实际值。如果不需要这个值,可以设为0。
minLoc:可选的输出参数,用于存储最小值的位置。如果不需要这个值,可以设为0。
maxLoc:可选的输出参数,用于存储最大值的位置。如果不需要这个值,可以设为0。
mask:可选的掩码,其大小和类型必须与 src 相同。如果指定了此参数,那么函数只查找具有非零掩码值的元素。
void TestDemo::histogram_2d_demo(Mat& image)
{
//绘制二维直方图
Mat hsv;
cvtColor(image,hsv,COLOR_BGR2HSV);//将图像转换为HSV图
// Quantize the hue to 30 levels
// and the saturation to 32 levels
int hbins =30,sbins=32;//H、S通道直方图尺寸
int histSize[] = {hbins,sbins};
// hue varies from 0 to 179, see cvtColor
float hranges[] = {0,180};//H通道像素值范围
// saturation varies from 0 (black-gray-white) to
// 255 (pure spectrum color)
float sranges[] = {0,256};//S通道像素值范围
const float* ranges[] = {hranges,sranges};
MatND hist;
// we compute the histogram from the 0-th and 1-st channels
int channels[] = {0,1};
calcHist(&hsv,1,channels,Mat(),// do not use mask
hist,2,histSize,ranges,true,// the histogram is uniform
false);//计算二维直方图
double maxVal = 0;
minMaxLoc(hist,0,&maxVal,0,0);
int scale = 10;
Mat histImg = Mat::zeros(sbins*scale,hbins*10,CV_8SC3);
for(int h =0;h<hbins;h++)
{
for(int s = 0;s<sbins;s++)
{
float binVal = hist.at<float>(h,s);
int intensity = cvRound(binVal * 255 / maxVal);
rectangle(histImg,Point(h*scale,s*scale),Point((h+1)*scale-1,(s+1)*scale - 1),Scalar::all(intensity),FILLED);
}
}
namedWindow("histogram_2d_demo",WINDOW_FREERATIO);
imshow("histogram_2d_demo",histImg);
}
3.直方图均衡化
图像直方图均衡化是一种用于增强图像对比度的方法,通过调整图像的灰度分布,使得各个灰度级均匀分布,从而提高图像的视觉效果。下面详细讲解一下图像直方图均衡化的原理和步骤:
原理:
灰度直方图: 图像的灰度直方图表示了图像中各个灰度级的分布情况,即每个灰度级的像素数量。
累积分布函数(CDF): CDF 是灰度直方图的累积形式,表示每个灰度级以下的像素累积数量。
均衡化变换: 均衡化变换的目标是将图像的灰度分布映射到均匀分布,即让 CDF 尽可能平滑。
步骤:
计算灰度直方图: 对图像进行灰度化,统计各个灰度级的像素数量。
计算累积分布函数(CDF): 利用灰度直方图计算各个灰度级的累积概率。
均衡化变换: 利用均衡化变换公式,对每个灰度级进行映射。
生成均衡化后的图像: 根据均衡化变换,生成均衡化后的图像。
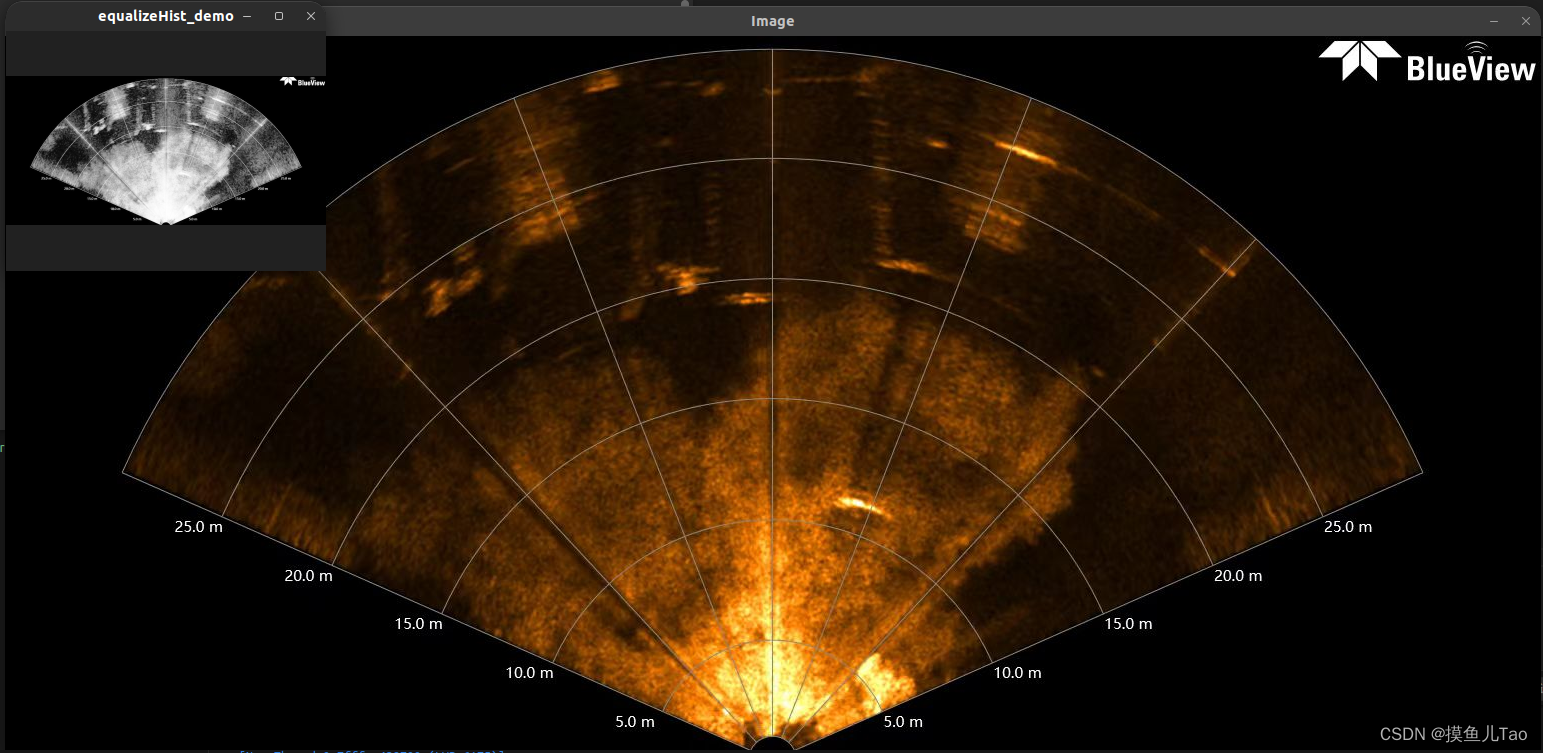
void TestDemo::equalizeHist_demo(Mat& image)
{
Mat equalizedImage;
Mat gray;
cvtColor(image,gray,COLOR_BGR2GRAY);
// applyColorMap(gray,bgr,COLORMAP_JET);
equalizeHist(gray,equalizedImage);
// cvtColor(equalizedImage,bgr,COLOR_GRAY2BGR);
namedWindow("equalizeHist_demo",WINDOW_FREERATIO);
imshow("equalizeHist_demo",equalizedImage);
}
4.图像卷积
图像卷积是图像处理中的一种基本操作,它通过在图像上滑动一个卷积核(也称为滤波器或窗口),对图像的每个像素进行加权和的操作。这一过程可以用来实现一系列的图像处理任务,如模糊、锐化、边缘检测等。下面是图像卷积的基本原理和步骤:
原理:
卷积核: 卷积核是一个小矩阵,包含了一组权重值。卷积操作时,卷积核在图像上滑动,与图像中的每个像素进行加权和的计算。
加权和计算: 对于图像中的每个像素,卷积核与图像的对应区域进行逐元素相乘,然后将所有乘积结果相加,得到最终的加权和。
滑动操作: 卷积核在图像上滑动,对每个像素都进行加权和的计算,得到新的图像。
步骤:
定义卷积核: 确定卷积核的大小和权重。
图像填充: 可选的步骤,对图像进行填充,以保留边缘信息。
卷积操作: 卷积核在图像上滑动,对每个像素进行加权和的计算。
输出结果: 得到卷积后的图像,即输出结果。
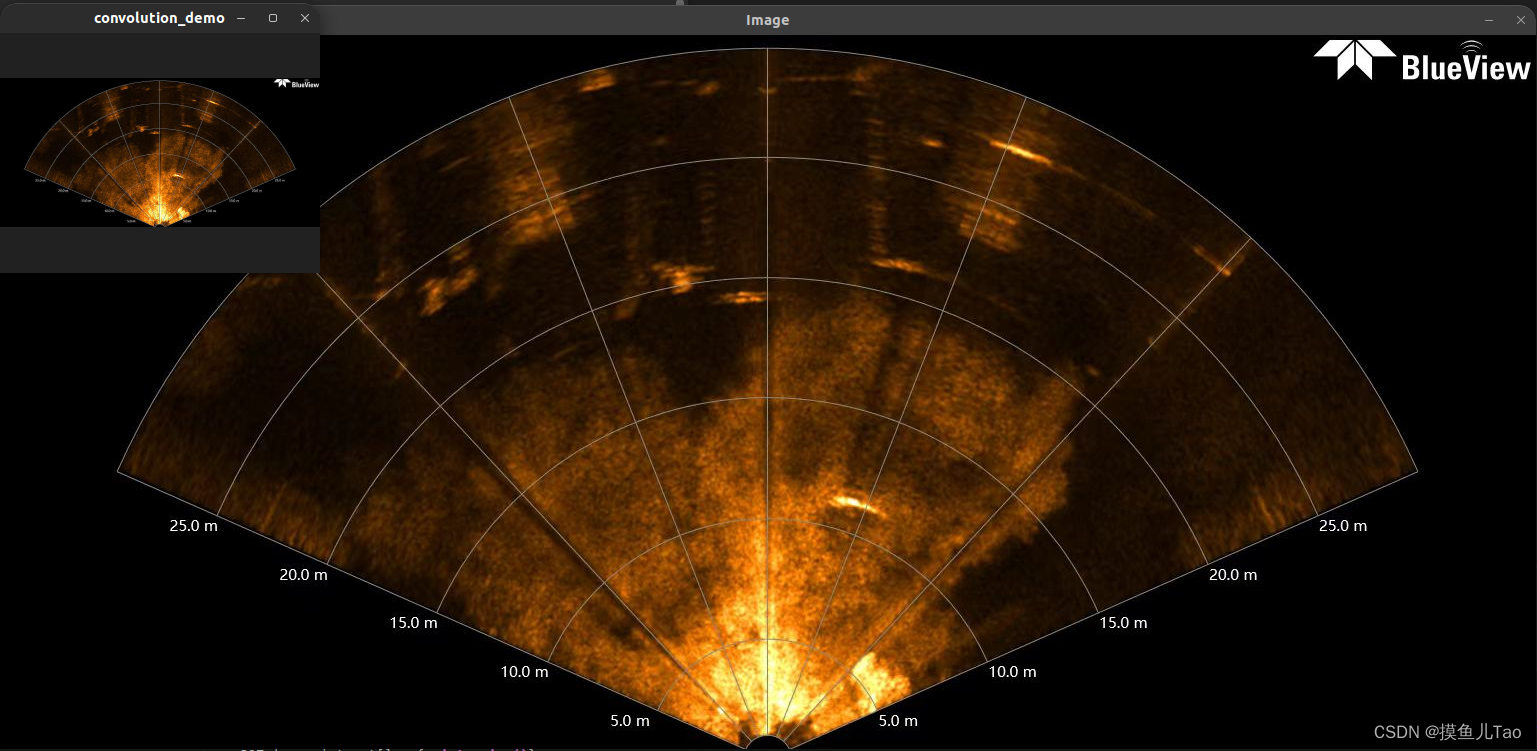
void TestDemo::convolution_demo(Mat& image)
{
//创建一个白色底板的图像
Mat img = Mat::zeros(Size(512,512),CV_8UC3);
img = Scalar(255,255,255);
//图像卷积操作
Mat kernel = (Mat_<float>(3,3)<<0,-1,0,-1,5,-1,0,-1,0);//创建卷积核 图像锐化
Mat dst;
filter2D(image,dst,-1,kernel);//图像卷积
//when ddepth=-1, the output image will have the same depth as the source
namedWindow("convolution_demo",WINDOW_FREERATIO);
imshow("convolution_demo",dst);
}
5.高斯滤波
高斯滤波(Gaussian Blur)是一种常用的图像模糊技术,它使用高斯函数对图像进行卷积,从而实现图像平滑处理。高斯滤波的主要目的是去除图像中的高频噪声,使图像更加平滑,减少细节信息,常用于图像预处理、边缘检测前的图像平滑等任务。
高斯滤波的原理:
高斯函数: 高斯函数是一种数学函数,通常用于表示正态分布。在图像处理中,高斯函数用于生成一个二维的高斯核(卷积核)。
卷积操作: 高斯核在图像上滑动,对图像中的每个像素进行加权和的计算。不同位置的像素受到的权重由高斯函数的形状决定,距离中心越远的像素权重越小。
权重计算: 高斯函数的形状由标准差(σ)决定,标准差越大,权重分布越广。权重计算采用二维高斯函数的值,将其归一化,得到最终的权重。
高斯滤波的步骤:
定义高斯核: 定义一个二维高斯核,指定标准差。
图像卷积: 将高斯核与图像进行卷积操作。
输出结果: 得到经过高斯模糊处理后的图像。
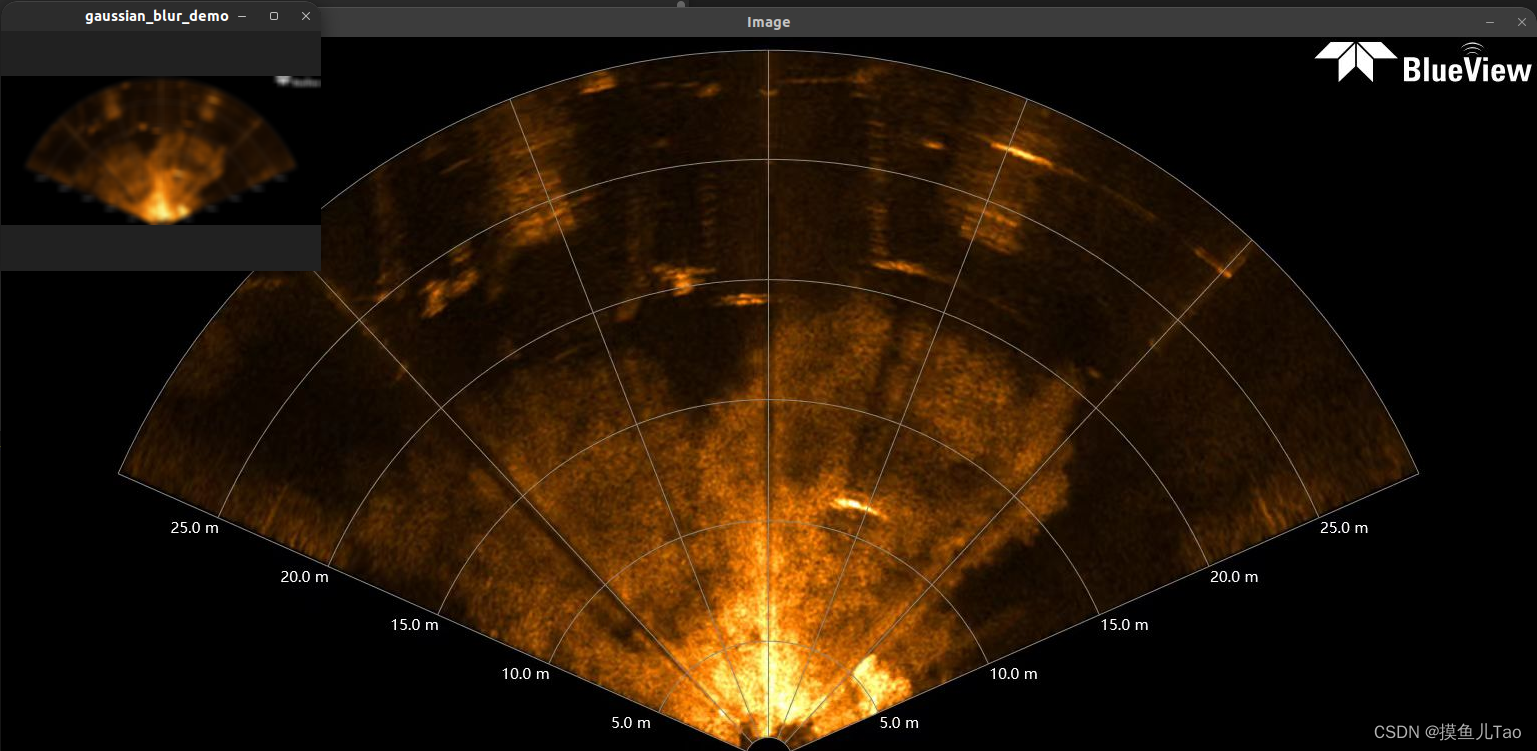
void TestDemo::guassian_blur_demo(Mat& image)
{
//定义高斯核大小和标准差
int kernel_size =35;
double sigma = 35;
//高斯模糊
Mat dst;
GaussianBlur(image,dst,Size(kernel_size,kernel_size),sigma);
//GaussianBlur参数为输入图像、输出图像、高斯核大小、标准差
namedWindow("gaussian_blur_demo",WINDOW_FREERATIO);
imshow("gaussian_blur_demo",dst);
}
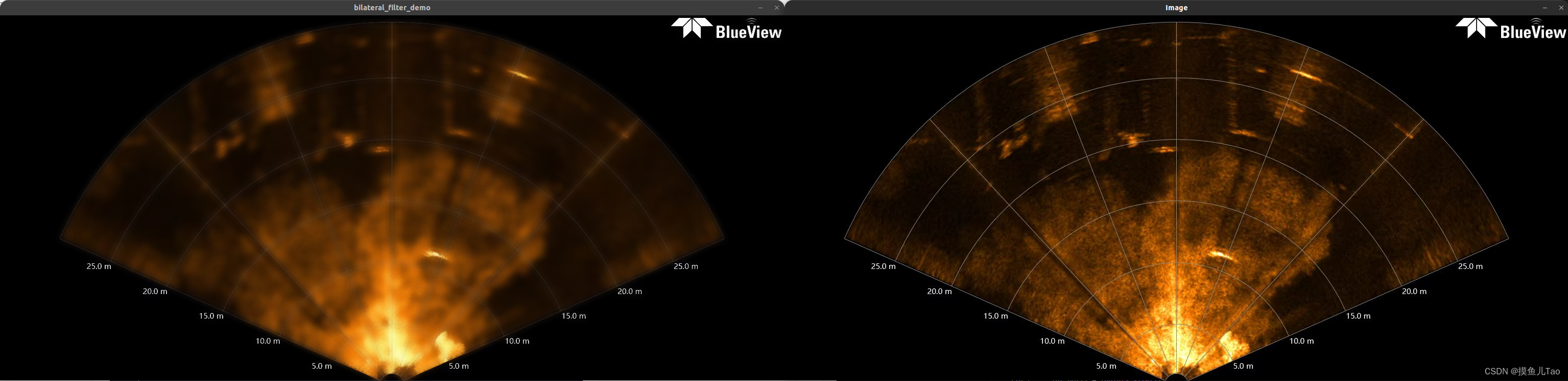
6.双边滤波
双边滤波是一种非线性的滤波方法,是结合图像的空间邻近度和像素值相似度的一种折衷处理,同时考虑空间与信息和灰度相似性,达到保边去噪的目的,具有简单、非迭代、局部处理的特点。之所以能够达到保边去噪的滤波效果是因为滤波器由两个函数构成:一个函数是由几何空间距离决定滤波器系数,另一个是由像素差值决定滤波器系数。
void bilateralFilter(InputArray src, OutputArray dst, int d, double sigmaColor, double sigmaSpace, int borderType=BORDER_DEFAULT )
. InputArray src: 输入图像,可以是Mat类型,图像必须是8位或浮点型单通道、三通道的图像。
. OutputArray dst: 输出图像,和原图像有相同的尺寸和类型。
. int d: 表示在过滤过程中每个像素邻域的直径范围。如果这个值是非正数,则函数会从第五个参数sigmaSpace计算该值。
. double sigmaColor: 颜色空间过滤器的sigma值,这个参数的值月大,表明该像素邻域内有月宽广的颜色会被混合到一起,产生较大的半相等颜色区域。
. double sigmaSpace: 坐标空间中滤波器的sigma值,如果该值较大,则意味着颜色相近的较远的像素将相互影响,从而使更大的区域中足够相似的颜色获取相同的颜色。当d>0时,d指定了邻域大小且与sigmaSpace五官,否则d正比于sigmaSpace.
. int borderType=BORDER_DEFAULT: 用于推断图像外部像素的某种边界模式,有默认值BORDER_DEFAULT.
void TestDemo::bilateral_filter_demo(Mat& image)
{
//定义参数
int diameter = 20 ; //像素领域的直径
double sigma_color = 175.0;// 颜色空间标准差
double sigma_space = 175.0;// 空间的标准差
//高斯双边滤波
Mat dst;
bilateralFilter(image,dst,diameter,sigma_color,sigma_space);
//显示结果
namedWindow("bilateral_filter_demo",WINDOW_AUTOSIZE);
imshow("bilateral_filter_demo",dst);
}
7.实时人脸检测
CascadeClassifier是opencv下objdetect模块中用来做目标检测的级联分类器的一个类;简而言之是滑动窗口机制+级联分类器的方式;
C++: bool CascadeClassifier::load(const string& filename)
void CascadeClassifier::detectMultiScale(const Mat& image, vector<Rect>& objects, double scaleFactor=1.1, int minNeighbors=3, int flags=0, Size minSize=Size(), Size maxSize=Size())
cascade – Haar classifier cascade (OpenCV 1.x API only). It can be loaded from XML or YAML file using Load(). When the cascade is not needed anymore, release it using cvReleaseHaarClassifierCascade(&cascade).
image – Matrix of the type CV_8U containing an image where objects are detected.
objects – Vector of rectangles where each rectangle contains the detected object.
scaleFactor – Parameter specifying how much the image size is reduced at each image scale.
minNeighbors – Parameter specifying how many neighbors each candiate rectangle should have to retain it.
flags – Parameter with the same meaning for an old cascade as in the function cvHaarDetectObjects. It is not used for a new cascade.
minSize – Minimum possible object size. Objects smaller than that are ignored.
maxSize – Maximum possible object size. Objects larger than that are ignored.
void TestDemo::face_detect_demo()
{
//加载人脸检测器模型
cv::CascadeClassifier face_cascade;
if(!face_cascade.load("/home/liutao/opencv-3.4.7/data/haarcascades/haarcascade_frontalface_default.xml"))
{
std::cerr<<" Error loading face cascade model!"<<std::endl;
return;
}
//在这里添加进行人脸检测的代码
//例如 ,可以在摄像头捕获的每一帧上进行人脸检测
cv::VideoCapture capture(0);//打开默认摄像头
if(!capture.isOpened())
{
std::cerr<<"Error opening camera!"<<std::endl;
return ;
}
cv::Mat frame;
while(capture.read(frame))
{
//转换图像为灰度图
Mat gray;
cvtColor(frame,gray,COLOR_BGR2GRAY);
equalizeHist(gray,gray);//直方图均衡化提高对比度
//进行双边滤波
Mat dst;
bilateralFilter(gray,dst,20,150,150);
//进行人脸检测
std::vector<cv::Rect>faces;
face_cascade.detectMultiScale(dst,faces,1.1,3,0,cv::Size(30,30));
flip(frame,frame,1);
//在图像上标记检测到的人脸
for(const auto& face :faces)
{
cv::rectangle(frame,face,cv::Scalar(255,0,0),2);//用蓝色矩形标记人脸
}
//显示结果
cv::imshow("Face Detection Demo",frame);
//检测按键,按下ESC键退出循环
if(cv::waitKey(30)==27)
{
break;
}
}
}
8.轮廓检测
轮廓发现findContours
void findContours( InputOutputArray image, //输入图像8bit单通道二值化图像
OutputArrayOfArrays contours, //找到的轮廓 vector<vector<Point>>
OutputArray hierachy //可选 图像拓扑结构 vector<Vec4i>
int mode, //轮廓返回模式
int method, //发现方法
Point offset = Point()); //轮廓像素的位移,默认(0,0)无位移
| mode类型 | Value |
|---|---|
| RETR_EXTERNAL | 只检测最外层轮廓 |
| RETR_LIST | 检索所有轮廓并存到List中,无上下结构,全部同级 |
| RETR_CCOMP | 检索所有轮廓,并组成双层结构 |
| RETR_TREE | 检索所有轮廓,并重新建立网状轮廓结构 |
| mode类型 | Value |
|---|---|
| CHAIN_APPROX_NONE | 返回轮廓中所有点 |
| CHAIN_APPROX_SIMPLE | 水平、垂直、斜 只返回最后一个点 |
| CHAIN_APPROX_TC89_KCOS CHAIN_APPROX_TC89_L1 | 使用Teh-Chin链逼近算法 |
hierarchy向量内每一个元素的4个int型变量——hierarchy[i][0] ~hierarchy[i][3],分别表示第i个轮廓 同级的下一条轮廓、同级的前一条轮廓、下级的第一个子节点、上级父节点。如果当前轮廓没有 同级的下一条轮廓、同级的前一条轮廓、下级的第一个子节点、上级父节点,则hierarchy[i][0] ~hierarchy[i][3]的相应位被设置为默认值-1。
void drawContours( InputOutputArray image, //输出图像
InputArrayOfArrays contours, //全部发现的轮廓对象
int contourIdx, //轮廓索引号
const Scalar& color, //颜色
int thickness = 1, //线宽
int lineType = LINE_8, //线类型
InputArray hierarchy = noArray(), //拓扑结构图
int maxLevel = INT_MAX, //最大层数,0绘制当前,1绘制当前及内嵌轮廓
Point offset = Point() ); //轮廓位移
void TestDemo::getContours(Mat& imgDil,Mat& img)
{
vector<vector<Point>> contours;//轮廓数据 检测到的轮廓,每个轮廓都存储为点向量
vector<Vec4i>hierarchy;//可选的输出向量(例如 std::vector<cv::Vec4i>),包含有关图像拓扑的信息
findContours(imgDil,contours,hierarchy,RETR_EXTERNAL,CHAIN_APPROX_SIMPLE);
for(int i=0;i<contours.size();i++)
{
double area = contourArea(contours[i]);//计算每个轮廓区域
cout<<area<<endl;
vector<vector<Point>>conPoly(contours.size());
vector<Rect>boundRect(contours.size());
string objectType;
if(area>1000)//过滤噪声
{
//找轮廓的近似多边形或曲线
double peri = arcLength(contours[i],true);
approxPolyDP(contours[i],conPoly[i],0.02 * peri,true);
cout<<conPoly[i].size()<<endl;
boundRect[i] = boundingRect(conPoly[i]);//找每个近似曲线的最小上边界矩形
int objCor = (int)conPoly[i].size();
if(objCor == 3){objectType = "Tri";}
if(objCor == 4){
float aspRatio = (float)boundRect[i].width/boundRect[i].height;//宽高比
cout << aspRatio <<endl;
if(aspRatio > 0.95 && aspRatio <1.05){
objectType = "Square";
}
else{
objectType = "Rect";
}
}
if(objCor >4 ){ objectType = "CirCle";}
drawContours(img,conPoly,i,Scalar(255,0,255),2);//绘制滤除噪声后的所有轮廓
rectangle(img,boundRect[i].tl(),boundRect[i].br(),Scalar(0,255,0),5);//绘制边界框
putText(img,objectType,{ boundRect[i].x,boundRect[i].y - 5},FONT_HERSHEY_PLAIN,1,Scalar(0,69,255),1);
}
}
}
原文地址:https://blog.csdn.net/lt405514623/article/details/137555066
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!