一分钟了解机器人自由度
目录
机器人的自由度是指机器人在空间中可以独立移动的方向和角度的数量,它是衡量机器人灵活性和功能性的一个重要指标。自由度的高低直接影响机器人能够执行的任务类型和复杂程度。

自由度的定义
机器人的自由度是指描述机器人末端执行器(例如机械手臂的末端或机器人的脚)能够自由变化的轴数或方向的数量。这些参数通常包括平移和旋转动作。
自由度的分类
转动自由度:机器人关节的旋转能力,如手臂的旋转。
平移自由度:机器人或其部件沿直线路径移动的能力,如汽车的行驶。
复合自由度:结合转动和平移的能力,如机械手臂在空间中的移动。
自由度的影响
自由度的增加可以提高机器人的灵活性和适应性,使其能够在更复杂的环境和任务中工作。然而,自由度的增加也会导致控制系统的复杂性增加,需要更高级的控制算法和更强的计算能力。
影响自由度的主要参数
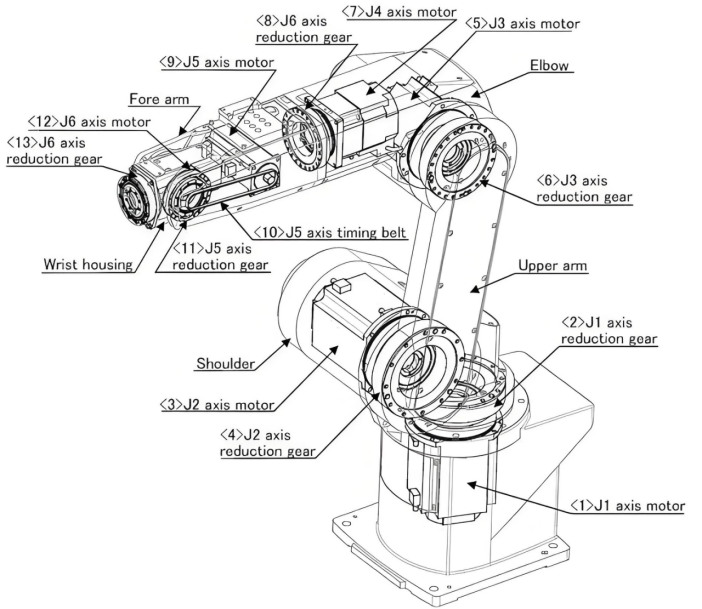
关节类型和数量
机器人的每个关节都提供一定程度的自由度。关节的类型(如旋转关节、滑动关节)和数量直接影响机器人的总自由度。
机械结构
机器人的设计和构造,包括连杆的长度、关节的布局和角度,都会影响自由度的实现和效率。
控制系统
控制系统的设计决定了机器人自由度的有效利用。高级的控制算法可以更好地协调各个自由度,实现复杂的运动。
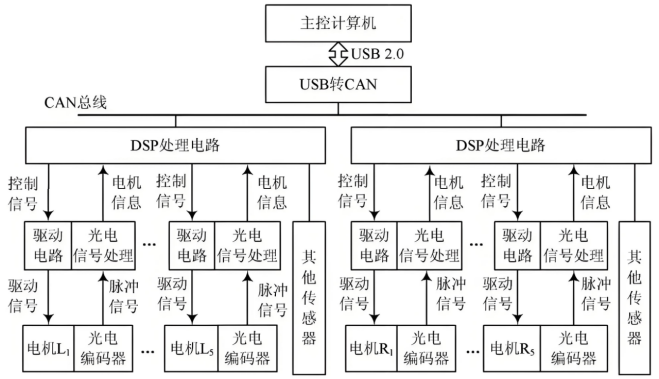
自由度控制的硬件架构原理
传感器
机器人需要各种传感器来检测关节的位置、速度、加速度、力、扭矩、触觉、视觉和接近探测等。
执行器
执行器(如电机、液压、气动、电磁等)根据控制信号驱动关节,实现机器人的运动。

控制器
控制器是系统的大脑,它负责接收来自传感器的数据,处理这些信息,并根据预定的算法和指令来控制执行器,从而实现机器人的精确运动和操作。控制器的性能直接影响机器人的响应速度和精度。
通信接口
机器人的各个组件之间需要通过通信接口进行数据交换,这些接口可以是有线的(如以太网、CAN总线 )或无线的(如Wi-Fi、蓝牙)。
软件和算法
软件层面包括操作系统、驱动程序和应用程序,它们共同工作以实现对机器人的控制。高级算法(如PID控制、动力学建模与控制、模型预测控制、路径规划与轨迹生成、神经网络控制)可以优化自由度的利用,提高机器人的性能。
在设计和实现机器人系统时,需要综合考虑以上各个方面,以确保机器人能够高效、准确地完成预定任务。
原文地址:https://blog.csdn.net/weixin_43309350/article/details/137591789
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!