【路径规划】 红嘴蓝鹊优化器:一种用于2D/3D无人机路径规划和工程设计问题的新型元启发式算法
摘要
本文提出了一种新型元启发式算法——红嘴蓝鹊优化器(RBMO),用于解决2D和3D无人机路径规划以及复杂工程设计问题。RBMO灵感来源于红嘴蓝鹊的群体合作行为,包括搜索、追逐、捕猎和食物储藏。该算法通过模拟这些行为,构建了RBMO的数学模型,并验证了其在数值优化和无人机路径规划中的有效性。实验结果显示,RBMO在多种测试集(如CEC2014和CEC2017)中表现优异,在工程设计应用中也能稳定地获得最优解,与现有的高性能优化算法相比,展示出显著的应用潜力。
理论
RBMO的灵感来源于红嘴蓝鹊的捕食行为,该鸟类通过群体合作来提高搜索效率和捕猎成功率。RBMO算法通过以下几种主要行为构建其数学模型:
-
食物搜索:通过小组和大群体的搜索策略,提高群体搜索效率,确保找到充足的食物资源。
-
攻击猎物:模拟红嘴蓝鹊在追逐猎物时的合作捕食行为,利用群体间的协调和快速反应进行捕捉。
-
食物储藏:模拟红嘴蓝鹊将多余食物储藏以备后用的行为,该策略提高了算法的全局搜索能力和局部开发能力。
RBMO在探索和开发阶段之间切换,利用随机搜索和合作行为避免陷入局部最优,进而提高优化效率和精度。RBMO的性能通过数值测试集和实际应用验证,包括2D和3D无人机路径规划以及工程设计问题,展现了其作为新型优化算法的优势。
实验结果
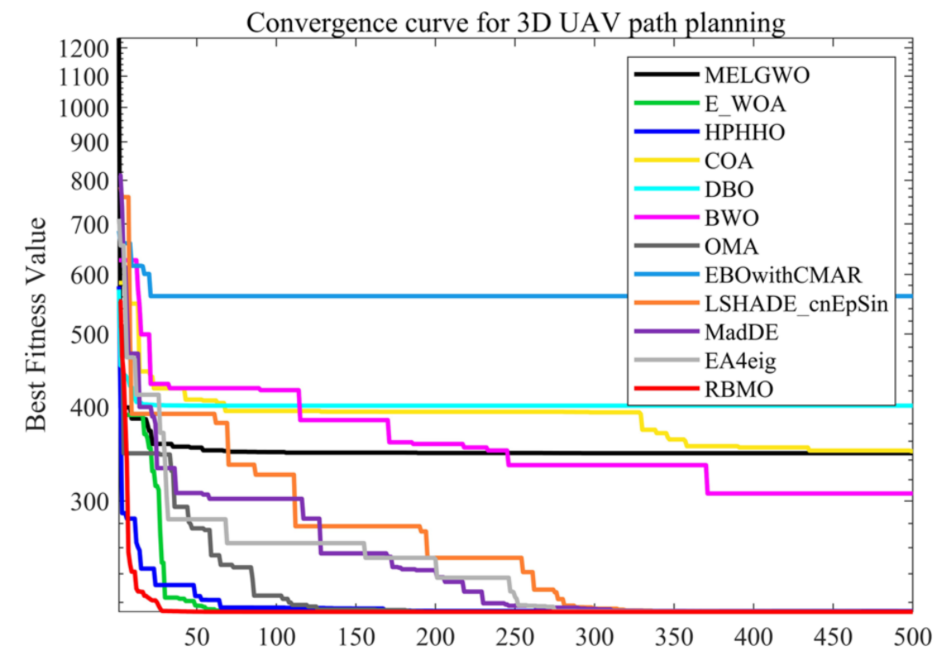
RBMO在多个标准测试集上表现出色,如CEC2014和CEC2017测试集,验证了其数值优化能力。此外,RBMO在2D和3D无人机路径规划中实现了比传统算法更优的路径规划结果。具体实验结果包括:
-
路径规划应用:RBMO在无人机路径规划中,平均路径长度、计算时间和路径平滑度均优于现有的多种算法。
-
工程设计应用:RBMO在解决多个工程设计问题(如结构优化、成本最小化)时,均能够稳定地找到成本最低的设计方案。
部分代码
% 初始化种群和参数
populationSize = 30;
maxIterations = 500;
problemDim = 30; % 问题维度
population = initializePopulation(populationSize, problemDim);
% 主优化循环
for iter = 1:maxIterations
% 搜索食物:小群体和大群体搜索策略
for i = 1:populationSize
if rand < 0.5
% 小群体搜索
newPosition = smallGroupSearch(population, i);
else
% 大群体搜索
newPosition = largeGroupSearch(population, i);
end
% 更新位置和适应度
if evaluate(newPosition) < evaluate(population(i, :))
population(i, :) = newPosition;
end
end
% 更新全局最优解
bestSolution = updateBestSolution(population);
end
function population = initializePopulation(size, dim)
% 随机初始化种群
population = rand(size, dim) * 100 - 50; % 范围 [-50, 50]
end
function newPosition = smallGroupSearch(pop, index)
% 小群体搜索策略
group = selectSmallGroup(pop);
newPosition = pop(index, :) + mean(group - pop(index, :));
end
function newPosition = largeGroupSearch(pop, index)
% 大群体搜索策略
group = selectLargeGroup(pop);
newPosition = pop(index, :) + mean(group - pop(index, :));
end
参考文献
❝
Fu, S., Li, K., Huang, H., Ma, C., Fan, Q., & Zhu, Y. (2024). Red-billed blue magpie optimizer: A novel metaheuristic algorithm for 2D/3D UAV path planning and engineering design problems. Artificial Intelligence Review, 57:134.
Kennedy, J., & Eberhart, R. (1995). Particle swarm optimization. Proceedings of ICNN'95 - International Conference on Neural Networks, 4, 1942-1948.
Mirjalili, S., Mirjalili, S. M., & Lewis, A. (2014). Grey Wolf Optimizer. Advances in Engineering Software, 69, 46-61.

原文地址:https://blog.csdn.net/2401_84610415/article/details/142418843
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!