机器学习---拉格朗日乘子法、Huber Loss、极大似然函数取对数的原因
1. 拉格朗日乘子法
拉格朗日乘子法(Lagrange multipliers)是一种寻找多元函数在一组约束下的极值的方法。通过引
入拉格朗日乘子,可将有d个变量与k个约束条件的最优化问题转化为具有d+k个变量的无约束优化
问题求解。本文希望通过一个直观简单的例子尽力解释拉格朗日乘子法和KKT条件的原理。以包含
一个变量一个约束的简单优化问题为例。
如图所示,我们的目标函数是f(x)=x2+4x-1,讨论两种约束条件g(x):1)在满足x≤-1约
束条件下求目标函数的最小值;2)在满足x≥-1约束条件g(x)下求目标函数的最小值。
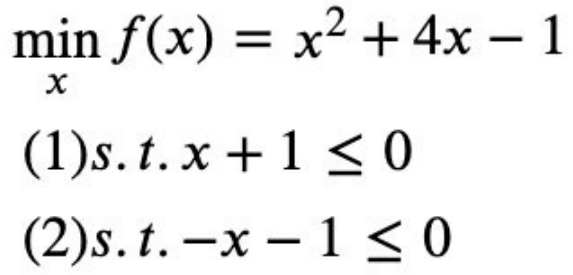
我们可以直观的从图中得到,
对于约束1)使目标值f(x)最小的最优解是x=-2;
对于约束2)使目标值f(x)最小的最优解是x=-1。下面我们用拉格朗日乘子来求解这个最优解。
当没有约束的时候,我们可以直接令目标函数的导数为0,求最优值。
可现在有约束,那怎么边考虑约束边求目标函数最优值呢?
最直观的办法是把约束放进目标函数里,由于本例中只有一个约束,所以引入一个朗格朗日乘子
入,构造一个新的函数,拉格朗日函数h(x),![]()
该拉格朗日函数h(x)最优解可能在g(x)<0区域中,或者在边界g(x)=0上,下面具体分析这两种情
况,当g(x)<0时,也就是最优解在g(x)<0区域中,对应约束1)x≤-1的情况。此时约束对求目标函
数最小值不起作用,等价于λ=0,直接通过条件∇f(x*)=0,得拉格朗日函数h(x)最优解x=-2。
当g(x)=0时,也就是最优解在边界g(x)=0上,对应约束1)x≥-1的情况。此时不等式约束转换为等
式约束,也就是在λ>0、约束起作用的情况下,通过求∇f(x*)+λ∇g(x*)=0,得拉格朗日
函数h(x)最优解x=-1。
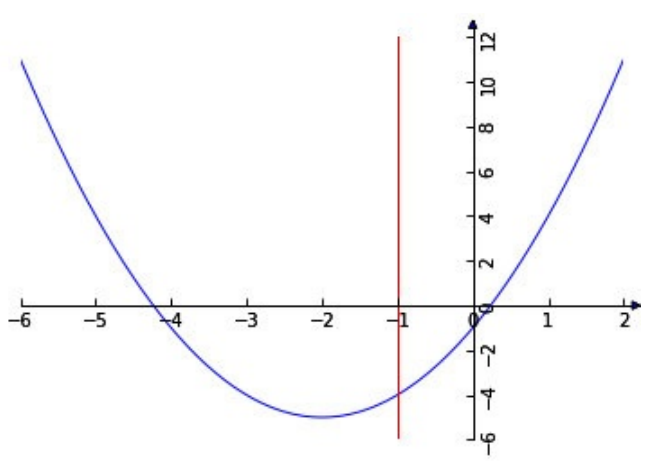
所以整合这两种情况,必须满足λg(x)=0。因此约束g(x)最小化f(x)的优化问题,可通过引入拉格朗
日因子转化为在如下约束下,最小化拉格朗日函数h(x),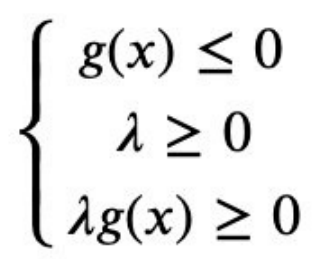
上述约束条件称为KKT条件。
该KKT条件可扩展到多个等式约束和不等式约束的优化问题。
2. Huber Loss
Huber Loss是一个用于回归问题的带参损失函数,优点是能增强平方误差损失函数(MSE,mean
square error)对离群点的鲁棒性。当预测偏差小于ō时,它采用平方误差,当预测偏差大于ō时,
采用的线性误差。相比于最小二乘的线性回归,Huber Loss降低了对离群点的惩罚程度,所以
Huber Loss是一种常用的鲁棒的回归损失函数。
Huber Loss 定义如下:

ō是Huber Loss的参数,y是真实值,f(x)是模型的预测值,
通过如上公式,我们可以发现,这个函数对于小一些的(y - f(x))误差函数是二次的,而对大的值误
差函数是线性的。Huber Loss 参数变化图:
3. 极大似然函数取对数的原因
①减少计算量
在计算一个独立同分布数据集的联合概率时,如:![]()
其联合概率是每个数据点概率的连乘:![]()
两边取对数则可以将连乘化为连加:![]()
乘法变成加法,从而减少了计算量;同时,如果概率中含有指数项,如高斯分布,能把指数项也化
为求和形式,进一步减少计算量;另外,在对联合概率求导时,和的形式会比积的形式更方便。
②利于结果更好的计算
但其实可能更重要的一点是,因为概率值都在[0,1]之间,因此,概率的连乘将会变成一个很小
的值,可能会引起浮点数下溢,尤其是当数据集很大的时候,联合概率会趋向于0,非常不利于之
后的计算。
③取对数并不影响最后结果的单调性
![]()
因为相同的单调性,它确保了概率的最大对数值出现在与原始概率函数相同的点上。因此,可以用
更简单的对数似然来代替原来的似然。
原文地址:https://blog.csdn.net/weixin_43961909/article/details/136514379
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!