ROS学习记录:IMU惯性测量单元消息包
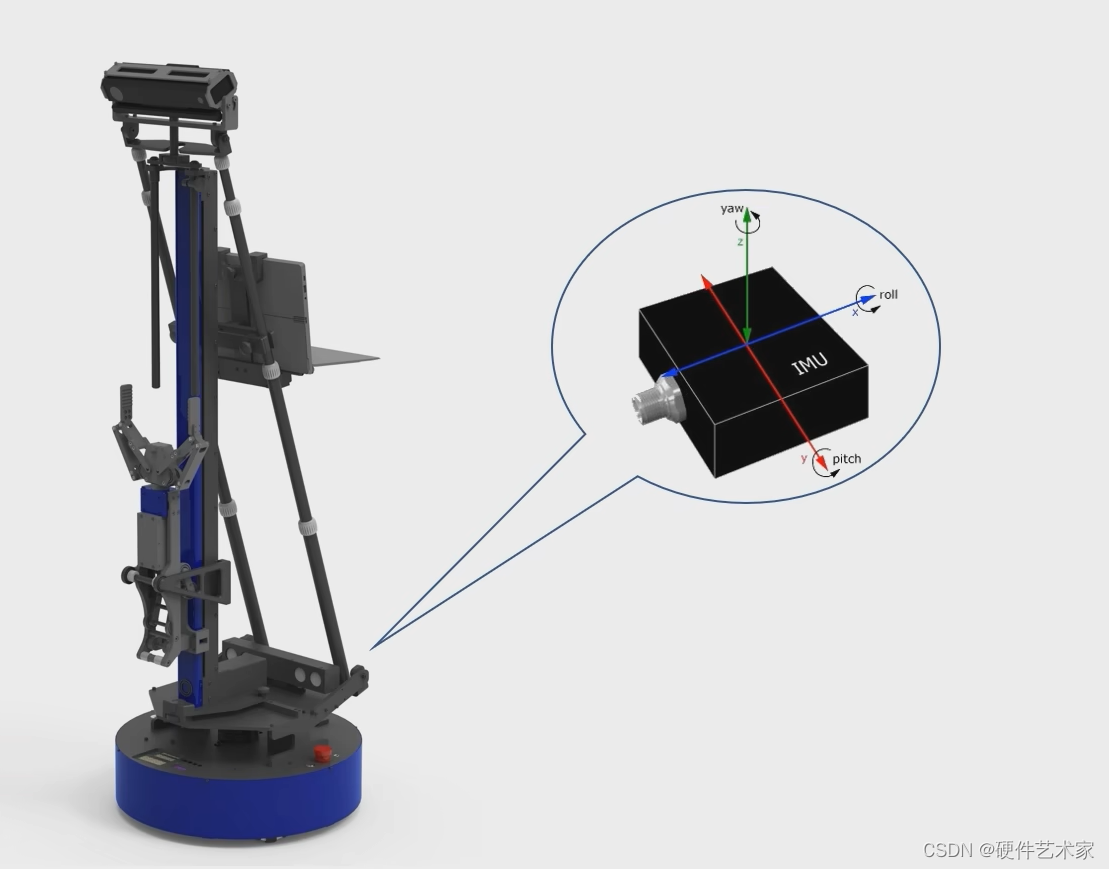
一、IMU,惯性测量单元,是一种传感器模块,用来测量机器人的空间姿态
二、先来看看ROS是怎么描述空间姿态的
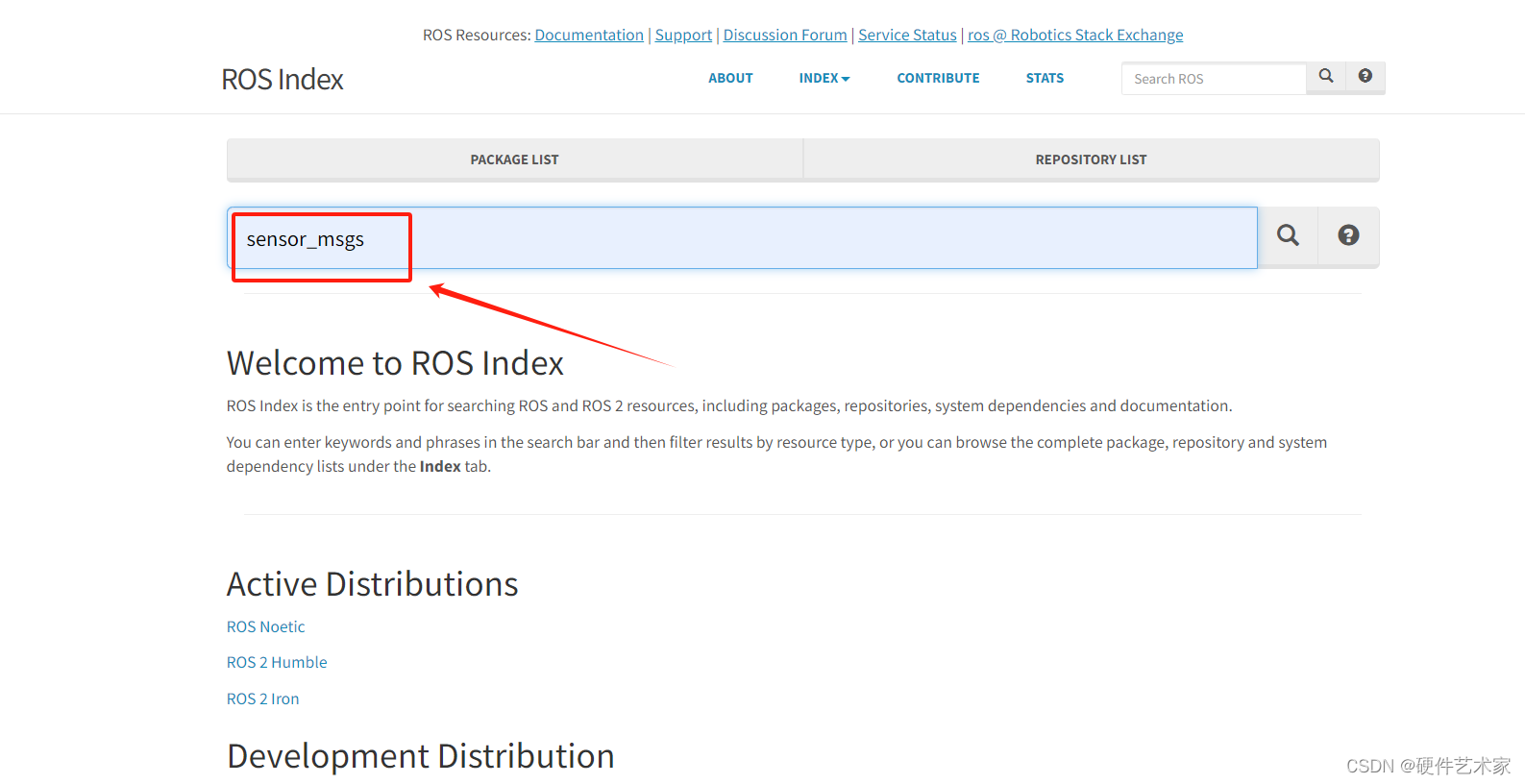
1、搜索ROS index 点击进入

2、搜索sensor_msgs
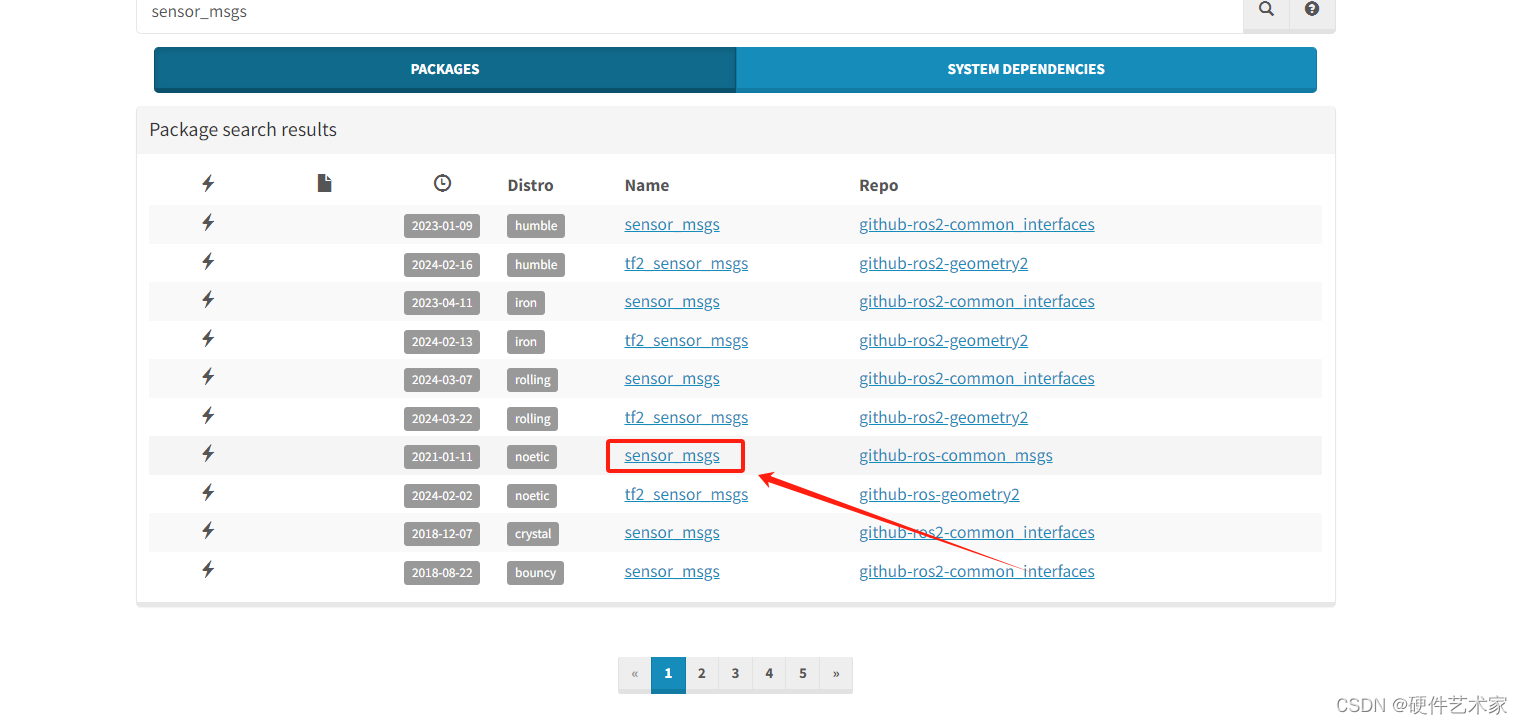
3、选择noetic版本
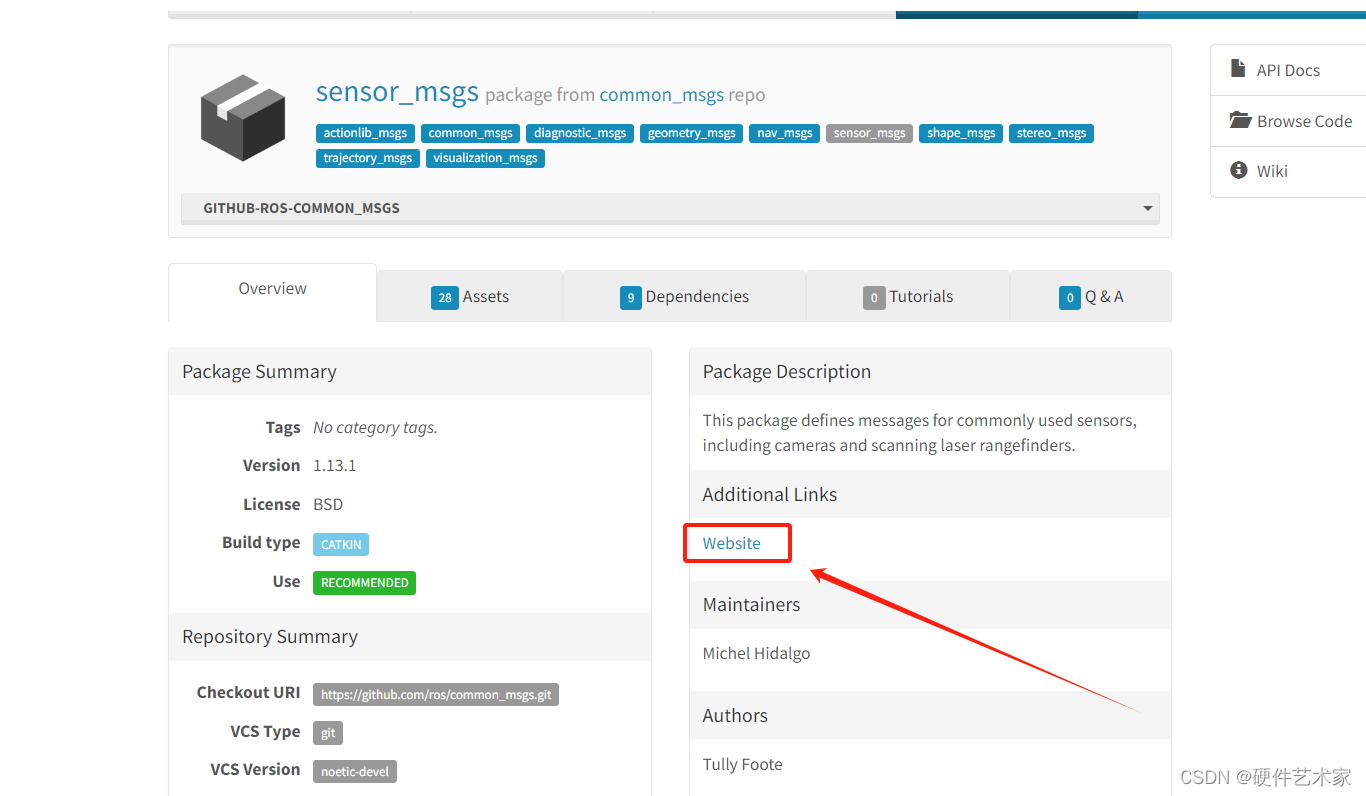
4、再点击进入Website
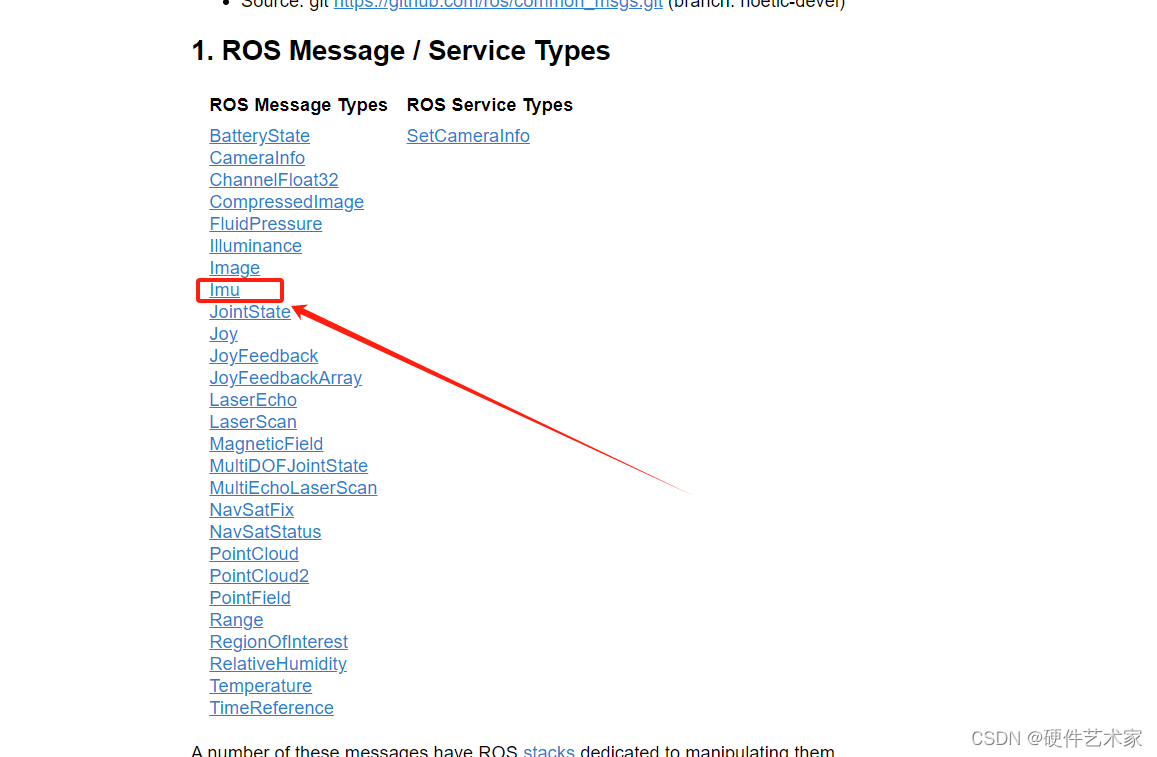
5、找到这个传感器消息列表,点击imu消息格式
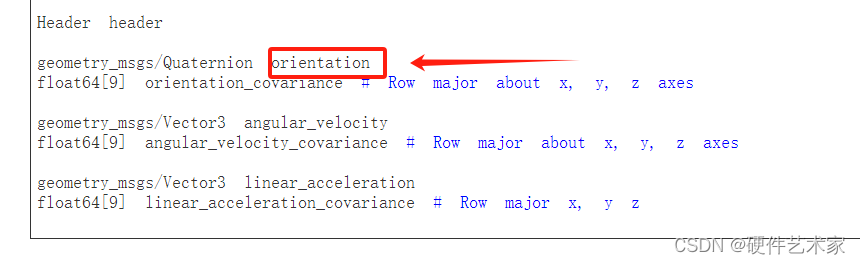
6、这便是ROS对IMU消息格式的定义
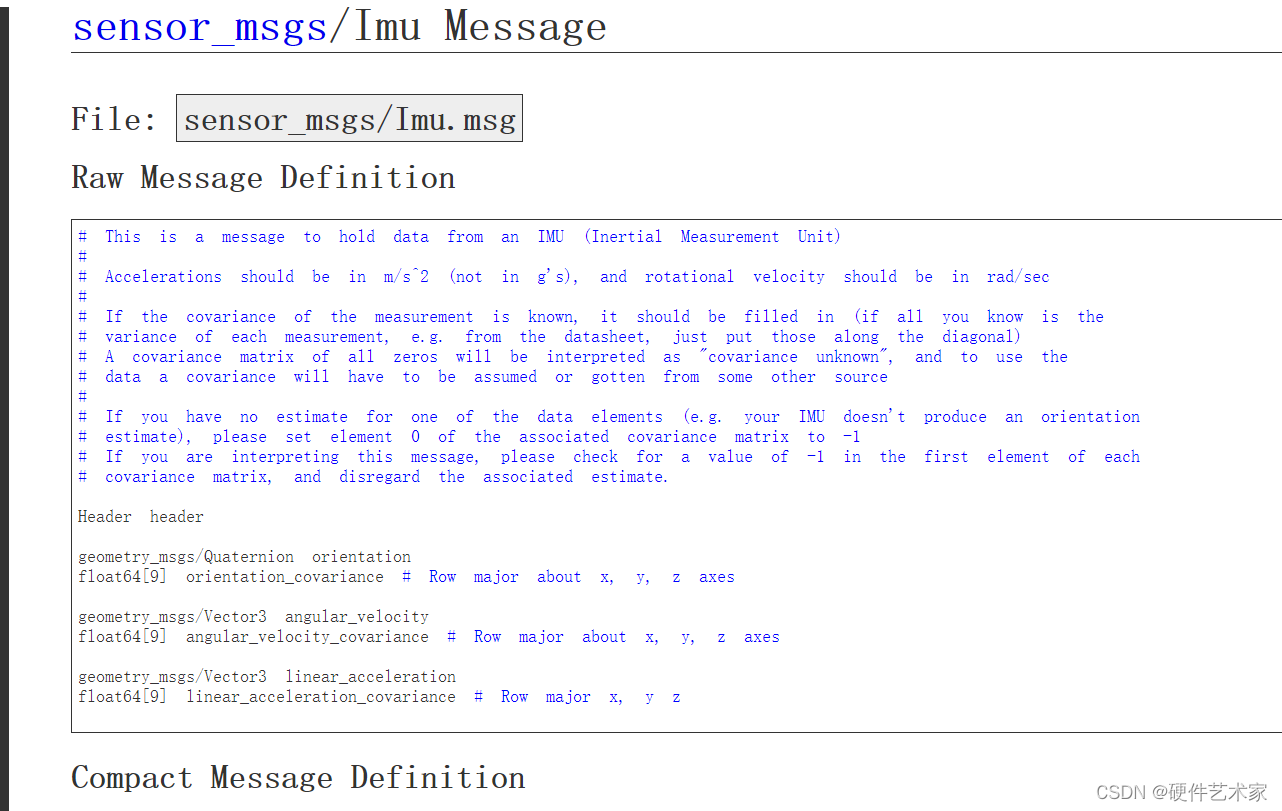
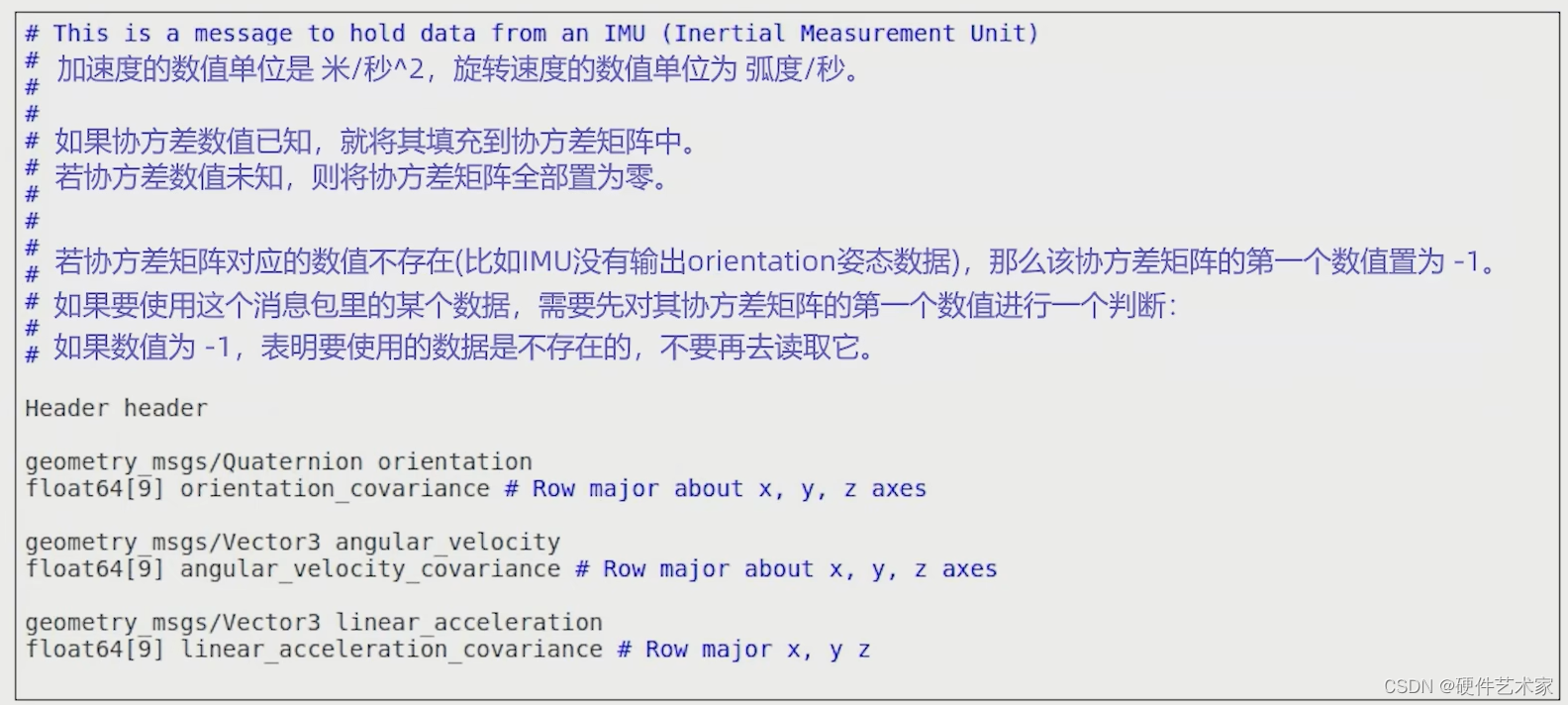
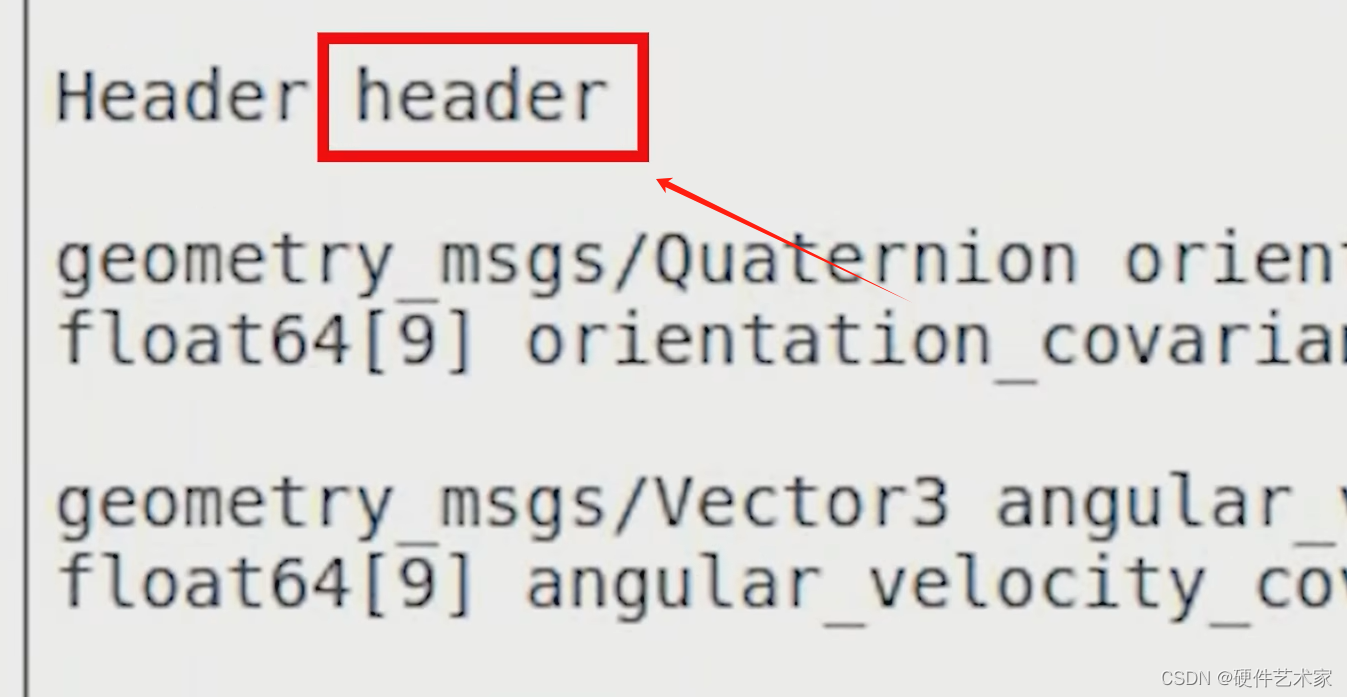
7、消息的头部是个header,记录了消息发送的时间戳和坐标系ID
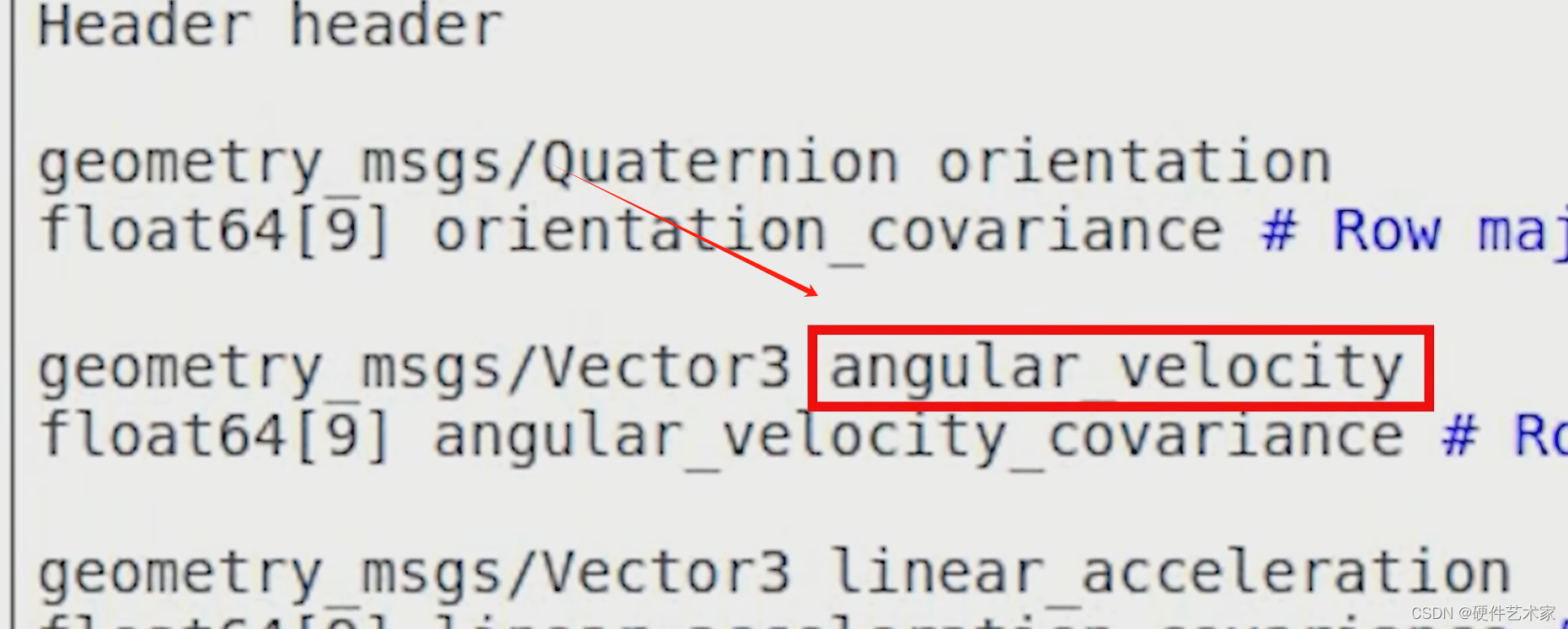
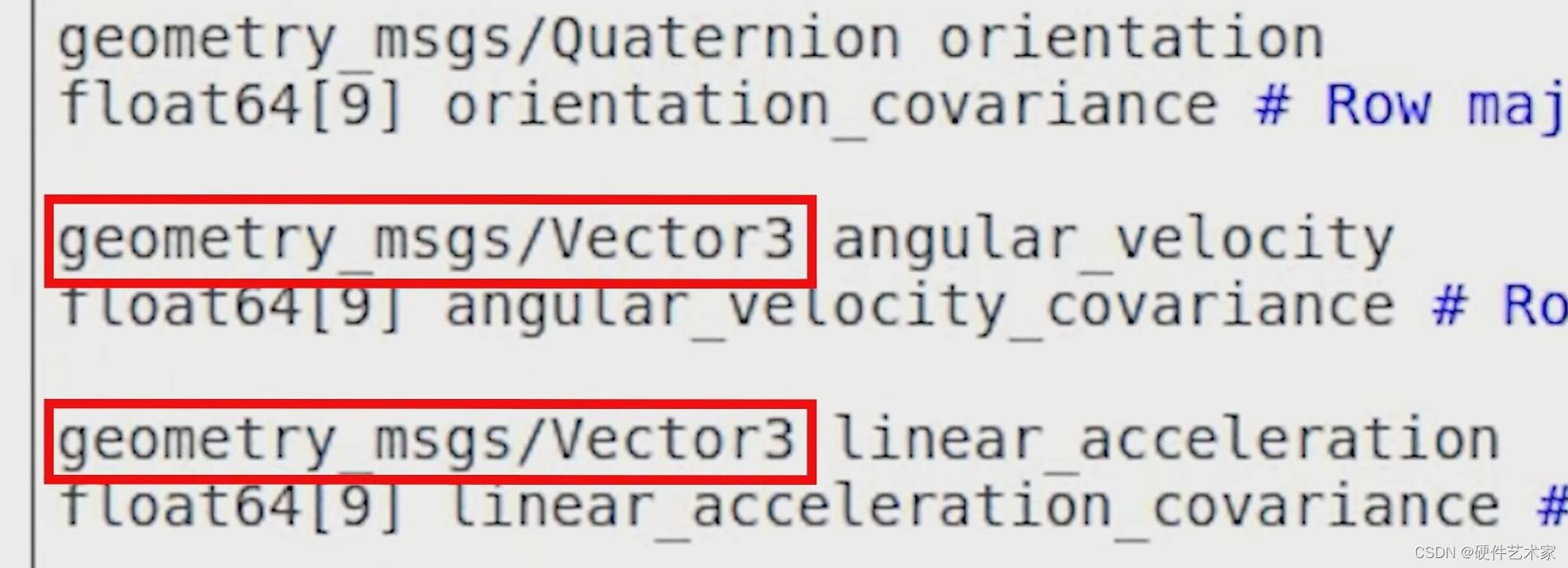
8、这是angular_velocity,角速度,它的数据类型是Vector3,它和速度控制消息Twist里的angular角速度一样,是描述机器人在三个坐标轴XYZ上的旋转速度
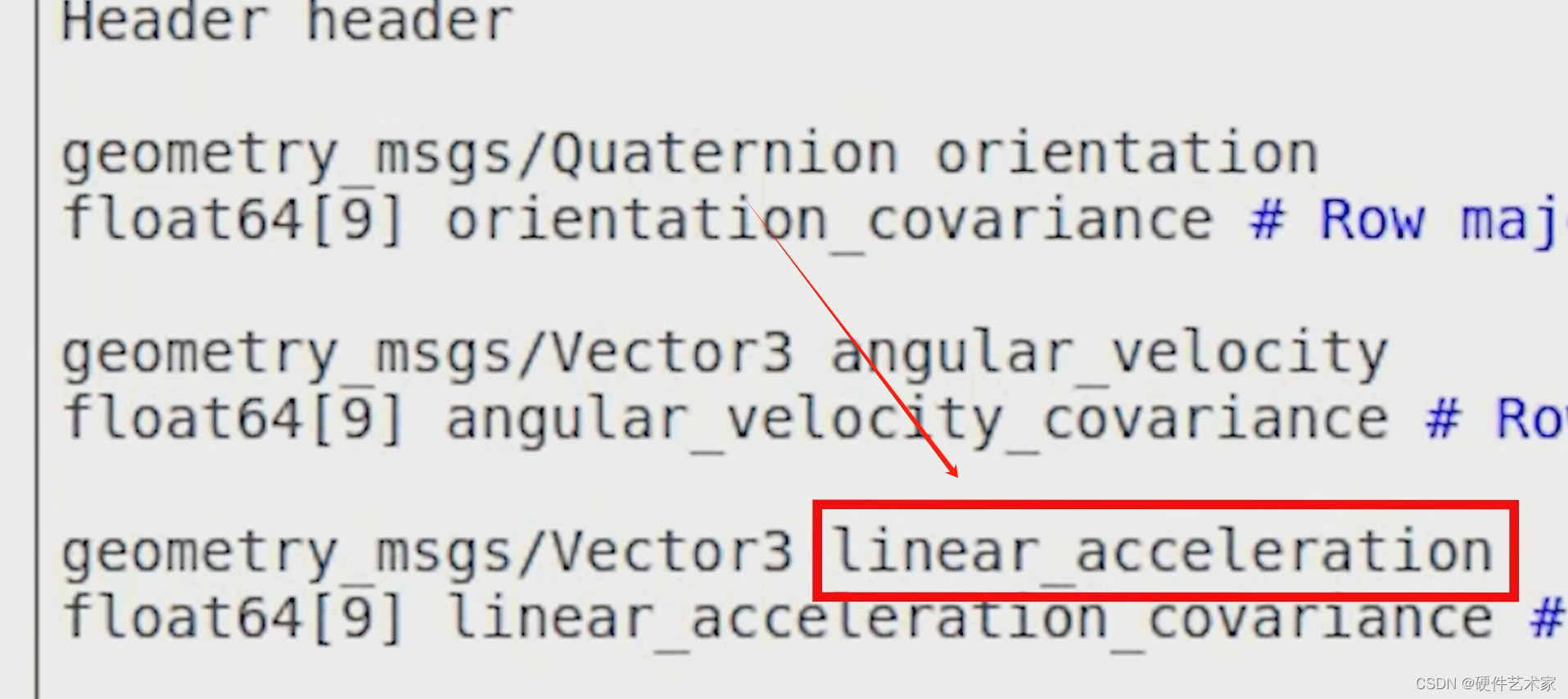
9、这是linear_acceleration,矢量加速度,类型也是Vector3
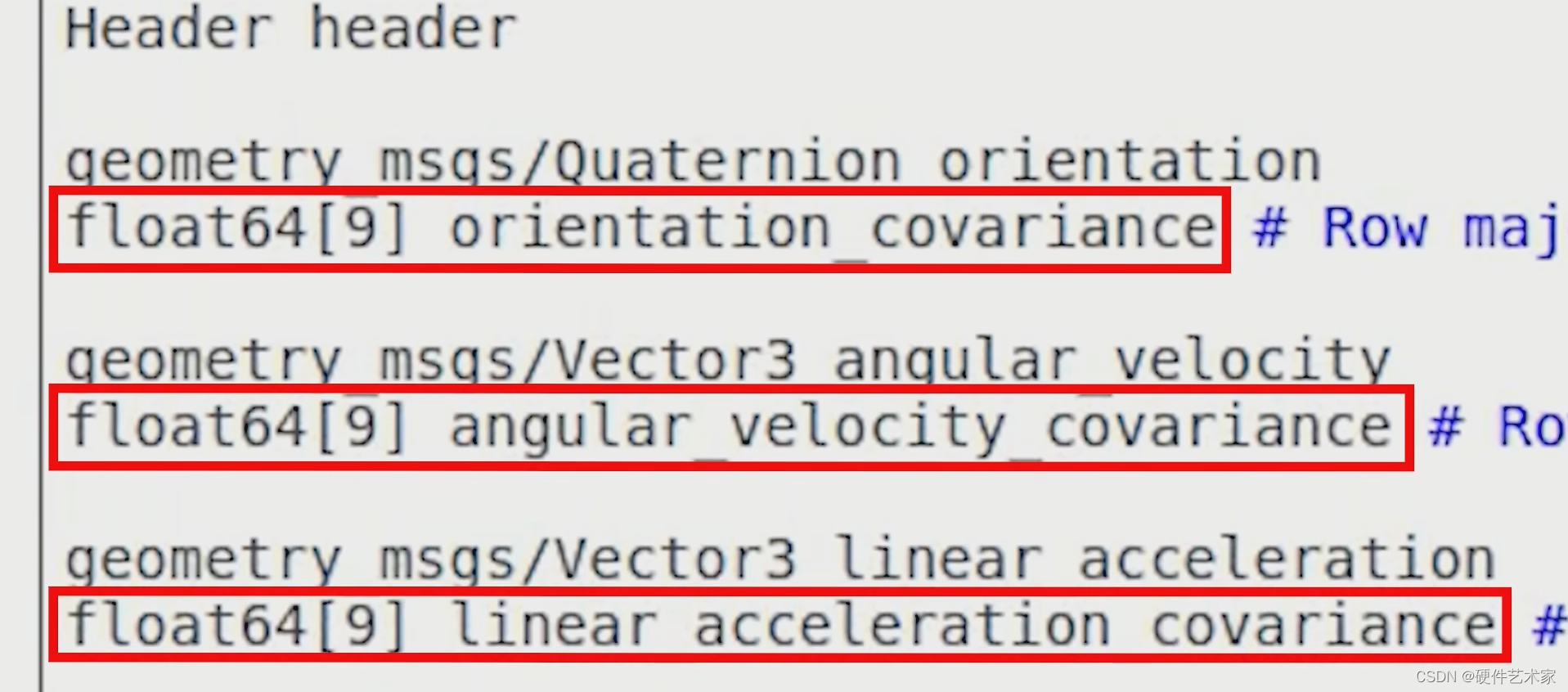
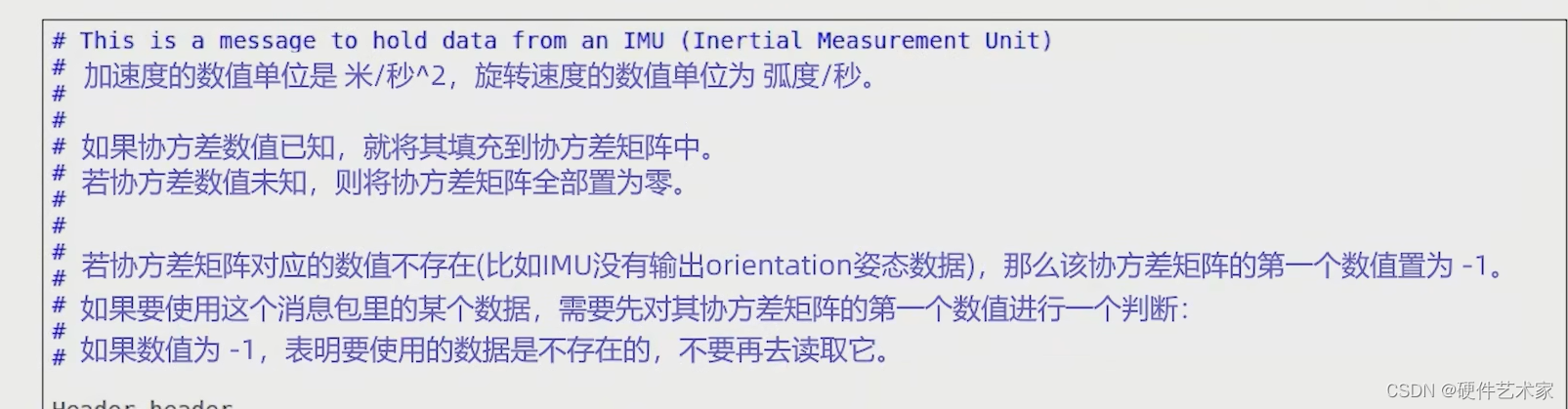
10、这三个数据成员各自都带了一个协方差矩阵,主要用于后期的优化和滤波,注释部分对协方差矩阵的使用做了相关说明
11、angular_velocity角速度和linear_acceleration矢量加速度,都各自包含了XYZ三个数值分量,一共六个数值,这便是六轴IMU。另外有一些IMU模块额外提供了XYZ三个轴的磁力计输出,就变成了九轴IMU
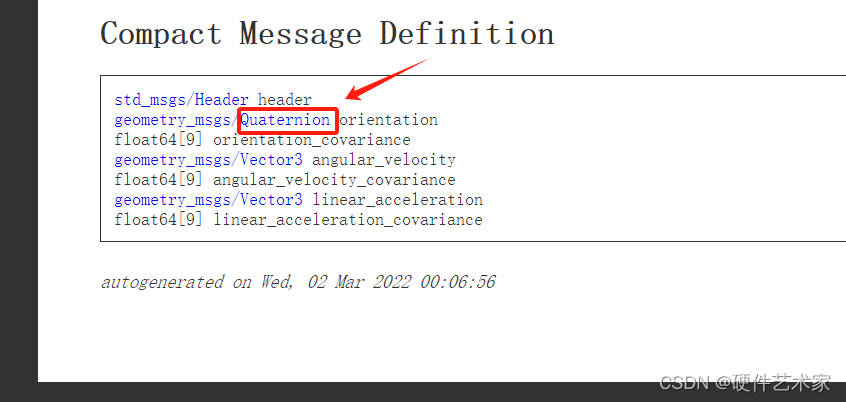
12、上述都是IMU传感器直接测量到的数值,也叫裸数据,将上述数值进行算法融合可以得到空间姿态描述,也就是前面没有提到的消息格式中的orientation,它描述的是机器人的朝向相对于空间中XYZ三个坐标轴的偏移量,也就是机器人的位姿。
13、orientation的类型是Quaternion,四元数的意思,采用四元数有效的避免了万向锁的问题

原文地址:https://blog.csdn.net/qq_52251819/article/details/136993701
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!