STM32F4_HAL_LWIP_RAM接口UDP实验
目录
RAW 的 UDP 接口简介
UDP 协议的 RAW 的 API 功能函数,我们使用这些函数来完成 UDP 的数据发送和接收功能。
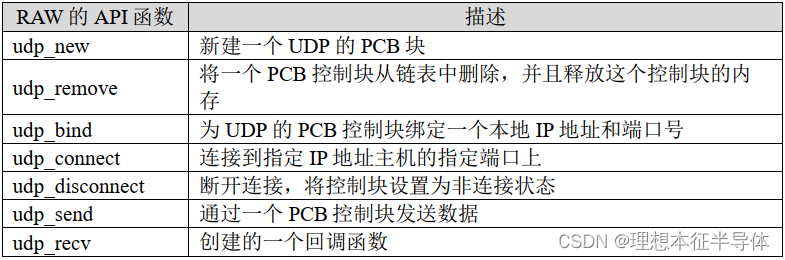
(1) udp_new 函数
此函数用来创建一个 UDP 控制块,这个控制块用来描述 IP 地址、端口号和状态等信息,该函数实现源码如下所示:
struct udp_pcb *
udp_new(void)
{
struct udp_pcb *pcb;
/* 申请一个 UDP 内存池 */
pcb = (struct udp_pcb *)memp_malloc(MEMP_UDP_PCB);
/* 申请成功*/
if (pcb != NULL)
{
/* 初始化 PCB 控制块所有零 */
memset(pcb, 0, sizeof(struct udp_pcb));
/* pcb->ttl = 255 */
pcb->ttl = UDP_TTL;
}
return pcb;
}可以看到,该控制块的内存由内存池申请,申请成功之后设置该控制块的生存时间。
(2) udp_remove 函数
从 PCB 控制块链表中移除一个控制块,并且把移除的控制块释放内存,该函数实现源码如下所示:
void
udp_remove(struct udp_pcb *pcb)
{
struct udp_pcb *pcb2;
mib2_udp_unbind(pcb);
/* 判断 pcb 被删除在列表的第一个 */
if (udp_pcbs == pcb)
{
/* 从第二 pcb 开始制作列表 */
udp_pcbs = udp_pcbs->next;
}
else/* pcb 不在列表的第一个 */
{
/* 遍历 pcb 列表 */
for (pcb2 = udp_pcbs; pcb2 != NULL; pcb2 = pcb2->next)
{
/* 在 udp_pcbs 列表中查找 pcb */
if (pcb2->next != NULL && pcb2->next == pcb)
{
/* 从列表中删除 pcb */
pcb2->next = pcb->next;
break;
}
}
}
memp_free(MEMP_UDP_PCB, pcb);
}以传入的控制块为条件,遍历 PCB 控制块链表,若链表中的控制块等于要移除的控制块,则该控制块移除 PCB 控制块链表,移除完成之后释放该控制块的内存。
(3) udp_recv 函数
此函数用来设置接收回调函数及函数参数,若用户使用 RAW 接口实现 UDP,则用户必须调用此函数设置接收回调函数,该函数的源码如下所示:
void
udp_recv(struct udp_pcb *pcb, udp_recv_fn recv, void *recv_arg)
{
/* 调用 recv()回调和用户数据 */
pcb->recv = recv;
pcb->recv_arg = recv_arg;
}可以看出,设置的函数和形参都是由 UDP 控制块的字段指向。
RAW 的 UDP 实验
硬件设计
例程功能
PC 端和开发板通过 UDP 协议连接起来, PC 端使用网络调试助手向开发板发送数据,开发板接收到以后在 LCD 上显示接收到的数据,我们也可以通过开发板上的按键发送数据给 PC。
* 硬件资源及引脚分配
* 1 LED灯
DS0(RED) : LED0 - PE0
* 2 串口1 (PA9/PA10连接在板载USB转串口芯片CH340上面)
* 3 正点原子 2.8/3.5/4.3/7/10寸TFTLCD模块(仅限MCU屏,16位8080并口驱动)
* 4 ETH,YT8521网络芯片
ETH_MDIO -------------------------> PA2
ETH_MDC --------------------------> PC1
ETH_RMII_REF_CLK------------------> PA1
ETH_RMII_CRS_DV ------------------> PA7
ETH_RMII_RXD0 --------------------> PC4
ETH_RMII_RXD1 --------------------> PC5
ETH_RMII_TX_EN -------------------> PG11
ETH_RMII_TXD0 --------------------> PG13
ETH_RMII_TXD1 --------------------> PG14
ETH_RESET-------------------------> PD3
* 2 独立按键
KEY0 - PE2
KEY1 - PE3
KEY2 - PE4
相关硬件驱动参考正点原子探索者开发指南HAL库版本
软件设计
UDP 配置步骤
1) 创建 UDP 控制块
调用函数 udp_new 创建 UDP 控制块。
2) 连接指定的 IP 地址和端口号
调用函数 udp_connect 绑定远程 IP 地址和远程端口号。
3) 绑定本地 IP 地址与端口号
调用函数 udp_bind 绑定本地 IP 地址和本地端口号。
4) 注册接收回调函数
udp_recv 是注册接收回调函数,该函数需要自己编写。
5) 发送数据
调用函数 udp_send 发送数据。
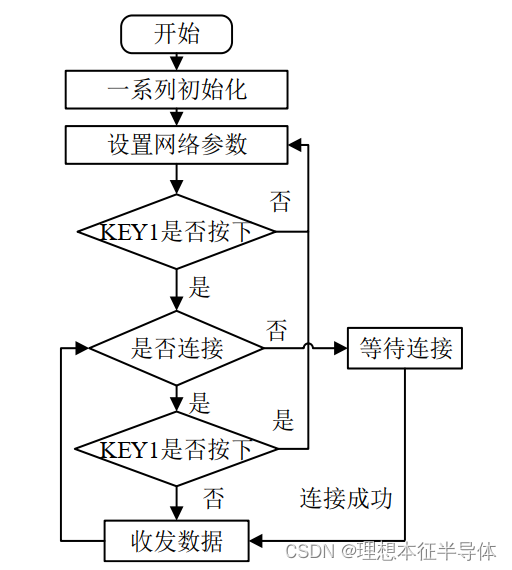
软件设计流程图
lwip_demo.h
#ifndef _LWIP_DEMO_H
#define _LWIP_DEMO_H
#include "./SYSTEM/sys/sys.h"
#define LWIP_SEND_DATA 0X80 /* 定义有数据发送 */
extern uint8_t lwip_send_flag; /* UDP数据发送标志位 */
void lwip_demo(void);
#endif /* _CLIENT_H */
lwip_demo.c
#include <stdint.h>
#include <stdio.h>
#include "./BSP/LCD/lcd.h"
#include "./MALLOC/malloc.h"
#include "./BSP/KEY/key.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "lwip/pbuf.h"
#include "lwip/udp.h"
#include "lwip/tcp.h"
#include "lwip_demo.h"
#include "lwip_comm.h"
#include "stdio.h"
#include "string.h"
#define LWIP_DEMO_RX_BUFSIZE 2000 /* 定义udp最大接收数据长度 */
#define LWIP_DEMO_PORT 8080 /* 定义udp连接的本地端口号 */
/* 接收数据缓冲区 */
uint8_t g_lwip_demo_recvbuf[LWIP_DEMO_RX_BUFSIZE];
/* 发送数据内容 */
char *g_lwip_demo_sendbuf = "ALIENTEK DATA\r\n";
/* 数据发送标志位 */
uint8_t g_lwip_send_flag;
static void lwip_udp_callback(void *arg, struct udp_pcb *upcb, struct pbuf *p, const ip_addr_t *addr, u16_t port);
void lwip_udp_senddata(struct udp_pcb *upcb);
void lwip_udp_connection_close(struct udp_pcb *upcb);
/**
* @brief 设置远端IP地址
* @param 无
* @retval 无
*/
void lwip_udp_set_remoteip(void)
{
char *tbuf;
uint16_t xoff;
uint8_t key;
lcd_clear(WHITE);
g_point_color = RED;
lcd_show_string(5, 30, 200, 16, 16, "STM32", g_point_color);
lcd_show_string(5, 50, 200, 16, 16, "UDP Test", g_point_color);
lcd_show_string(5, 70, 200, 16, 16, "Remote IP Set", g_point_color);
lcd_show_string(5, 90, 200, 16, 16, "KEY0:+ KEY2:-", g_point_color);
lcd_show_string(5, 110, 200, 16, 16, "KEY1:OK", g_point_color);
tbuf = mymalloc(SRAMIN, 100); /* 申请内存 */
if (tbuf == NULL)return;
/* 前三个IP保持和DHCP得到的IP一致 */
g_lwipdev.remoteip[0] = g_lwipdev.ip[0];
g_lwipdev.remoteip[1] = g_lwipdev.ip[1];
g_lwipdev.remoteip[2] = g_lwipdev.ip[2];
sprintf((char *)tbuf, "Remote IP:%d.%d.%d.", g_lwipdev.remoteip[0], g_lwipdev.remoteip[1], g_lwipdev.remoteip[2]); /* 远端IP */
lcd_show_string(5, 150, 210, 16, 16, tbuf, g_point_color);
g_point_color = BLUE;
xoff = strlen((char *)tbuf) * 8 + 5;
lcd_show_xnum(xoff, 150, g_lwipdev.remoteip[3], 3, 16, 0, g_point_color);
while (1)
{
key = key_scan(0);
if (key == KEY1_PRES)break;
else if (key)
{
if (key == KEY0_PRES)g_lwipdev.remoteip[3] ++; /* IP增加 */
if (key == KEY2_PRES)g_lwipdev.remoteip[3] --; /* IP减少 */
lcd_show_xnum(xoff, 150, g_lwipdev.remoteip[3], 3, 16, 0X80, g_point_color); /* 显示新IP */
}
}
myfree(SRAMIN, tbuf);
}
/**
* @brief UDP服务器回调函数
* @param arg :传入参数
* @param upcb:UDP控制块
* @param p : 网络数据包
* @param addr:IP地址
* @param port:端口号
* @retval 无
*/
static void lwip_udp_callback(void *arg, struct udp_pcb *upcb, struct pbuf *p, const ip_addr_t *addr, u16_t port)
{
uint32_t data_len = 0;
struct pbuf *q;
if (p != NULL) /* 接收到不为空的数据时 */
{
memset(g_lwip_demo_recvbuf, 0, LWIP_DEMO_RX_BUFSIZE); /* 数据接收缓冲区清零 */
for (q = p; q != NULL; q = q->next) /* 遍历完整个pbuf链表 */
{
/* 判断要拷贝到LWIP_DEMO_RX_BUFSIZE中的数据是否大于LWIP_DEMO_RX_BUFSIZE的剩余空间,如果大于 */
/* 的话就只拷贝LWIP_DEMO_RX_BUFSIZE中剩余长度的数据,否则的话就拷贝所有的数据 */
if (q->len > (LWIP_DEMO_RX_BUFSIZE - data_len)) memcpy(g_lwip_demo_recvbuf + data_len, q->payload, (LWIP_DEMO_RX_BUFSIZE - data_len)); /* 拷贝数据 */
else memcpy(g_lwip_demo_recvbuf + data_len, q->payload, q->len);
data_len += q->len;
if (data_len > LWIP_DEMO_RX_BUFSIZE) break; /* 超出UDP客户端接收数组,跳出 */
}
upcb->remote_ip = *addr; /* 记录远程主机的IP地址 */
upcb->remote_port = port; /* 记录远程主机的端口号 */
g_lwipdev.remoteip[0] = upcb->remote_ip.addr & 0xff; /* IADDR4 */
g_lwipdev.remoteip[1] = (upcb->remote_ip.addr >> 8) & 0xff; /* IADDR3 */
g_lwipdev.remoteip[2] = (upcb->remote_ip.addr >> 16) & 0xff; /* IADDR2 */
g_lwipdev.remoteip[3] = (upcb->remote_ip.addr >> 24) & 0xff; /* IADDR1 */
g_lwip_send_flag |= 1 << 6; /* 标记接收到数据了 */
pbuf_free(p); /* 释放内存 */
}
else
{
udp_disconnect(upcb);
lcd_clear(WHITE); /* 清屏 */
lcd_show_string(30, 30, 200, 16, 16, "STM32", g_point_color);
lcd_show_string(30, 50, 200, 16, 16, "UDP Test", g_point_color);
lcd_show_string(30, 70, 200, 16, 16, "ATOM@ALIENTEK", g_point_color);
lcd_show_string(30, 90, 200, 16, 16, "KEY1:Connect", g_point_color);
lcd_show_string(30, 190, 210, 16, 16, "Connect break!", g_point_color);
}
}
/**
* @brief lwip_democ程序入口
* @param 无
* @retval 无
*/
void lwip_demo(void)
{
err_t err;
struct udp_pcb *udppcb; /* 定义一个UDP服务器控制块 */
ip_addr_t rmtipaddr; /* 远端ip地址 */
char *tbuf;
uint8_t key;
uint8_t res = 0;
uint8_t t = 0;
lwip_udp_set_remoteip();/* 先选择IP */
lcd_clear(WHITE); /* 清屏 */
g_point_color = RED;
lcd_show_string(5, 30, 200, 16, 16, "STM32", g_point_color);
lcd_show_string(5, 50, 200, 16, 16, "UDP Test", g_point_color);
lcd_show_string(5, 70, 200, 16, 16, "ATOM@ALIENTEK", g_point_color);
lcd_show_string(5, 90, 200, 16, 16, "KEY0:Send data", g_point_color);
lcd_show_string(5, 110, 200, 16, 16, "KEY1:Exit", g_point_color);
tbuf = mymalloc(SRAMIN, 200); /* 申请内存 */
if (tbuf == NULL)return ; /* 内存申请失败了,直接退出 */
sprintf((char *)tbuf, "Local IP:%d.%d.%d.%d", g_lwipdev.ip[0], g_lwipdev.ip[1], g_lwipdev.ip[2], g_lwipdev.ip[3]); /* 服务器IP */
lcd_show_string(5, 130, 210, 16, 16, tbuf, g_point_color);
sprintf((char *)tbuf, "Remote IP:%d.%d.%d.%d", g_lwipdev.remoteip[0], g_lwipdev.remoteip[1], g_lwipdev.remoteip[2], g_lwipdev.remoteip[3]); /* 远端IP */
lcd_show_string(5, 150, 210, 16, 16, tbuf, g_point_color);
sprintf((char *)tbuf, "Remote Port:%d", LWIP_DEMO_PORT); /* 客户端端口号 */
lcd_show_string(5, 170, 210, 16, 16, tbuf, g_point_color);
g_point_color = BLUE;
udppcb = udp_new();
if (udppcb) /* 创建成功 */
{
IP4_ADDR(&rmtipaddr, g_lwipdev.remoteip[0], g_lwipdev.remoteip[1], g_lwipdev.remoteip[2], g_lwipdev.remoteip[3]);
err = udp_connect(udppcb, &rmtipaddr, LWIP_DEMO_PORT); /* UDP客户端连接到指定IP地址和端口号的服务器 */
if (err == ERR_OK)
{
err = udp_bind(udppcb, IP_ADDR_ANY, LWIP_DEMO_PORT); /* 绑定本地IP地址与端口号 */
if (err == ERR_OK) /* 绑定完成 */
{
udp_recv(udppcb,lwip_udp_callback, NULL); /* 注册接收回调函数 */
g_point_color = BLUE;
lcd_show_string(5, 190, lcddev.width - 30, lcddev.height - 190, 16, "Receive Data:", g_point_color); /* 提示消息 */
g_point_color = MAGENTA;
}
else res = 1;
}
else res = 1;
}
else res = 1;
while (res == 0)
{
key = key_scan(0);
if (key == KEY1_PRES)break;
if (key == KEY0_PRES) /* KEY0按下了,发送数据 */
{
lwip_udp_senddata(udppcb);
}
if (g_lwip_send_flag & 1 << 6) /* 是否收到数据 */
{
lcd_fill(5, 230, lcddev.width - 1, lcddev.height - 1, WHITE); /* 清上一次数据 */
/* 显示接收到的数据 */
lcd_show_string(6, 230, lcddev.width - 2, lcddev.height - 230, 16, (char *)g_lwip_demo_recvbuf, g_point_color);
g_lwip_send_flag &= ~(1 << 6); /* 标记数据已经被处理了 */
}
lwip_periodic_handle(); /* LWIP轮询任务 */
delay_ms(2);
t++;
if (t == 200)
{
t = 0;
LED0_TOGGLE();
}
}
g_point_color = DARKBLUE;
lwip_udp_connection_close(udppcb);
myfree(SRAMIN, tbuf);
}
/**
* @brief UDP服务器发送数据
* @param upcb: UDP控制块
* @retval 无
*/
void lwip_udp_senddata(struct udp_pcb *upcb)
{
struct pbuf *ptr;
ptr = pbuf_alloc(PBUF_TRANSPORT, strlen((char *)g_lwip_demo_sendbuf), PBUF_POOL); /* 申请内存 */
if (ptr)
{
pbuf_take(ptr, (char *)g_lwip_demo_sendbuf, strlen((char *)g_lwip_demo_sendbuf)); /* 将g_lwip_demo_sendbuf中的数据打包进pbuf结构中 */
udp_send(upcb, ptr); /* udp发送数据 */
pbuf_free(ptr); /* 释放内存 */
}
}
/**
* @brief 关闭tcp连接
* @param upcb: UDP控制块
* @retval 无
*/
void lwip_udp_connection_close(struct udp_pcb *upcb)
{
udp_disconnect(upcb);
udp_remove(upcb); /* 断开UDP连接 */
g_lwip_send_flag &= ~(1 << 5); /* 标记连接断开 */
lcd_clear(WHITE); /* 清屏 */
lcd_show_string(5, 30, 200, 16, 16, "STM32", g_point_color);
lcd_show_string(5, 50, 200, 16, 16, "UDP Test", g_point_color);
lcd_show_string(5, 70, 200, 16, 16, "ATOM@ALIENTEK", g_point_color);
lcd_show_string(5, 90, 200, 16, 16, "KEY1:Connect", g_point_color);
lcd_show_string(5, 190, 210, 16, 16, "STATUS:Disconnected", g_point_color);
}
主函数
#include "./SYSTEM/sys/sys.h"
#include "./SYSTEM/usart/usart.h"
#include "./SYSTEM/delay/delay.h"
#include "./BSP/LED/led.h"
#include "./BSP/LCD/lcd.h"
#include "./USMART/usmart.h"
#include "./BSP/KEY/key.h"
#include "./BSP/SRAM/sram.h"
#include "./MALLOC/malloc.h"
#include "lwip_comm.h"
#include "lwipopts.h"
#include "lwip_demo.h"
/**
* @breif 加载UI
* @param mode : bit0:0,不加载;1,加载前半部分UI
* bit1:0,不加载;1,加载后半部分UI
* @retval 无
*/
void lwip_test_ui(uint8_t mode)
{
uint8_t speed;
uint8_t buf[30];
if(mode & 1<< 0)
{
lcd_show_string(6, 10, 200, 32, 32, "STM32", DARKBLUE);
lcd_show_string(6, 40, lcddev.width, 24, 24, "lwIP UDP Test", DARKBLUE);
lcd_show_string(6, 70, 200, 16, 16, "ATOM@ALIENTEK", DARKBLUE);
}
if(mode & 1 << 1)
{
lcd_show_string(6, 110, 200, 16, 16, "lwIP Init Successed", MAGENTA);
if(g_lwipdev.dhcpstatus == 2)
{
sprintf((char*)buf,"DHCP IP:%d.%d.%d.%d",g_lwipdev.ip[0],g_lwipdev.ip[1],g_lwipdev.ip[2],g_lwipdev.ip[3]); /* 显示动态IP地址 */
}
else
{
sprintf((char*)buf,"Static IP:%d.%d.%d.%d",g_lwipdev.ip[0],g_lwipdev.ip[1],g_lwipdev.ip[2],g_lwipdev.ip[3]); /* 打印静态IP地址 */
}
lcd_show_string(6, 130, 200, 16, 16, (char*)buf, MAGENTA);
speed = ethernet_chip_get_speed(); /* 得到网速 */
if(speed)
{
lcd_show_string(6, 150, 200, 16, 16, "Ethernet Speed:100M", MAGENTA);
}
else
{
lcd_show_string(6, 150, 200, 16, 16, "Ethernet Speed:10M", MAGENTA);
}
}
}
int main(void)
{
uint8_t t = 0;
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(336, 8, 2, 7); /* 设置时钟,168Mhz */
delay_init(168); /* 延时初始化 */
usart_init(115200); /* 串口初始化为115200 */
usmart_dev.init(84); /* 初始化USMART */
led_init(); /* 初始化LED */
lcd_init(); /* 初始化LCD */
key_init(); /* 初始化按键 */
sram_init(); /* SRAM初始化 */
my_mem_init(SRAMIN); /* 初始化内部SRAM内存池 */
my_mem_init(SRAMEX); /* 初始化外部SRAM内存池 */
my_mem_init(SRAMCCM); /* 初始化内部CCM内存池 */
lwip_test_ui(1); /* 加载前半部分UI */
lcd_show_string(6, 110, 200, 16, 16, "lwIP Init !!", BLUE);
while (lwip_comm_init() != 0)
{
lcd_show_string(6, 110, 200, 16, 16, "lwIP Init failed!!", BLUE);
delay_ms(500);
lcd_fill(6, 50, 200 + 30, 50 + 16, WHITE);
lcd_show_string(6, 110, 200, 16, 16, "Retrying... ", BLUE);
delay_ms(500);
LED1_TOGGLE();
}
while (!ethernet_read_phy(PHY_SR)) /* 检查MCU与PHY芯片是否通信成功 */
{
printf("MCU与PHY芯片通信失败,请检查电路或者源码!!!!\r\n");
}
#if LWIP_DHCP
lcd_show_string(6, 130, 200, 16, 16, "DHCP IP configing... ", BLUE); /* 开始DHCP */
while ((g_lwipdev.dhcpstatus != 2) && (g_lwipdev.dhcpstatus != 0XFF)) /* 等待DHCP获取成功/超时溢出 */
{
lwip_periodic_handle();
delay_ms(1000);
}
#endif
lwip_demo(); /* lwIP程序入口 */
lwip_test_ui(2); /* 加载后半部分UI */
while (1)
{
lwip_periodic_handle(); /* LWIP轮询任务 */
delay_ms(2);
t ++;
if (t >= 200)
{
t = 0;
LED0_TOGGLE();
}
}
}
完整工程参考正点原子lwip源码RAW_UDP实验
原文地址:https://blog.csdn.net/banchengl/article/details/139282819
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!