STM32利用硬件I2C读取MPU6050陀螺仪数据
有了前面的基本配置,这节读取MPU6050的数据还算是简单,主要就是初始化时给MPU6050一些配置,取消睡眠模式,MPU6050开机是默认睡眠模式的,读写无效,所以上来就要先更改配置:
MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器:
电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪
电源管理寄存器2,保持默认值0,所有轴均不待机
采样率分频寄存器,配置采样率
配置寄存器,配置DLPF
陀螺仪配置寄存器,选择满量程为±2000°/s
加速度计配置寄存器,选择满量程为±16g

配置完MPU6050的各个功能寄存器,剩下的就是读取陀螺仪的数据了。
函 数:MPU6050获取数据
参 数:AccX AccY AccZ 加速度计X、Y、Z轴的数据,使用输出参数的形式返回,范 围:-32768~32767
参 数:GyroX GyroY GyroZ 陀螺仪X、Y、Z轴的数据,使用输出参数的形式返回,范 围:-32768~32767
读取加速度计X轴的高8位数据
读取加速度计X轴的低8位数据
数据拼接,通过输出参数返回

MUP6050.c文件:
#include "stm32f10x.h" // Device header
#include "MPU6050_Reg.h"
#define MPU6050_ADDRESS0xD0//MPU6050的I2C从机地址
/**
* 函 数:MPU6050等待事件
* 参 数:同I2C_CheckEvent
* 返 回 值:无
*/
void MPU6050_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{
uint32_t Timeout;
Timeout = 10000;//给定超时计数时间
while (I2C_CheckEvent(I2Cx, I2C_EVENT) != SUCCESS)//循环等待指定事件
{
Timeout --;//等待时,计数值自减
if (Timeout == 0)//自减到0后,等待超时
{
/*超时的错误处理代码,可以添加到此处*/
break;//跳出等待,不等了
}
}
}
/**
* 函 数:MPU6050写寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 参 数:Data 要写入寄存器的数据,范围:0x00~0xFF
* 返 回 值:无
*/
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{
I2C_GenerateSTART(I2C2, ENABLE);//硬件I2C生成起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//等待EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter);//硬件I2C发送从机地址,方向为发送
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);//等待EV6
I2C_SendData(I2C2, RegAddress);//硬件I2C发送寄存器地址
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING);//等待EV8
I2C_SendData(I2C2, Data);//硬件I2C发送数据
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);//等待EV8_2
I2C_GenerateSTOP(I2C2, ENABLE);//硬件I2C生成终止条件
}
/**
* 函 数:MPU6050读寄存器
* 参 数:RegAddress 寄存器地址,范围:参考MPU6050手册的寄存器描述
* 返 回 值:读取寄存器的数据,范围:0x00~0xFF
*/
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
I2C_GenerateSTART(I2C2, ENABLE);//硬件I2C生成起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//等待EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Transmitter);//硬件I2C发送从机地址,方向为发送
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);//等待EV6
I2C_SendData(I2C2, RegAddress);//硬件I2C发送寄存器地址
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);//等待EV8_2
I2C_GenerateSTART(I2C2, ENABLE);//硬件I2C生成重复起始条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//等待EV5
I2C_Send7bitAddress(I2C2, MPU6050_ADDRESS, I2C_Direction_Receiver);//硬件I2C发送从机地址,方向为接收
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED);//等待EV6
I2C_AcknowledgeConfig(I2C2, DISABLE);//在接收最后一个字节之前提前将应答失能
I2C_GenerateSTOP(I2C2, ENABLE);//在接收最后一个字节之前提前申请停止条件
MPU6050_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//等待EV7
Data = I2C_ReceiveData(I2C2);//接收数据寄存器
I2C_AcknowledgeConfig(I2C2, ENABLE);//将应答恢复为使能,为了不影响后续可能产生的读取多字节操作
return Data;
}
/**
* 函 数:MPU6050初始化
* 参 数:无
* 返 回 值:无
*/
void MPU6050_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE);//开启I2C2的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//开启GPIOB的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//将PB10和PB11引脚初始化为复用开漏输出
/*I2C初始化*/
I2C_InitTypeDef I2C_InitStructure;//定义结构体变量
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;//模式,选择为I2C模式
I2C_InitStructure.I2C_ClockSpeed = 50000;//时钟速度,选择为50KHz
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;//时钟占空比,选择Tlow/Thigh = 2
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;//应答,选择使能
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;//应答地址,选择7位,从机模式下才有效
I2C_InitStructure.I2C_OwnAddress1 = 0x00;//自身地址,从机模式下才有效
I2C_Init(I2C2, &I2C_InitStructure);//将结构体变量交给I2C_Init,配置I2C2
/*I2C使能*/
I2C_Cmd(I2C2, ENABLE);//使能I2C2,开始运行
/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/
MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01);//电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪
MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00);//电源管理寄存器2,保持默认值0,所有轴均不待机
MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09);//采样率分频寄存器,配置采样率
MPU6050_WriteReg(MPU6050_CONFIG, 0x06);//配置寄存器,配置DLPF
MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18);//陀螺仪配置寄存器,选择满量程为±2000°/s
MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18);//加速度计配置寄存器,选择满量程为±16g
}
/**
* 函 数:MPU6050获取ID号
* 参 数:无
* 返 回 值:MPU6050的ID号
*/
uint8_t MPU6050_GetID(void)
{
return MPU6050_ReadReg(MPU6050_WHO_AM_I);//返回WHO_AM_I寄存器的值
}
/**
* 函 数:MPU6050获取数据
* 参 数:AccX AccY AccZ 加速度计X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 参 数:GyroX GyroY GyroZ 陀螺仪X、Y、Z轴的数据,使用输出参数的形式返回,范围:-32768~32767
* 返 回 值:无
*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ, int16_t *Temp)
{
uint8_t DataH, DataL;//定义数据高8位和低8位的变量
DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);//读取加速度计X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);//读取加速度计X轴的低8位数据
*AccX = (DataH << 8) | DataL;//数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);//读取加速度计Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);//读取加速度计Y轴的低8位数据
*AccY = (DataH << 8) | DataL;//数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);//读取加速度计Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);//读取加速度计Z轴的低8位数据
*AccZ = (DataH << 8) | DataL;//数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);//读取陀螺仪X轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);//读取陀螺仪X轴的低8位数据
*GyroX = (DataH << 8) | DataL;//数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);//读取陀螺仪Y轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);//读取陀螺仪Y轴的低8位数据
*GyroY = (DataH << 8) | DataL;//数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);//读取陀螺仪Z轴的高8位数据
DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);//读取陀螺仪Z轴的低8位数据
*GyroZ = (DataH << 8) | DataL;//数据拼接,通过输出参数返回
DataH = MPU6050_ReadReg(MPU6050_TEMP_OUT_H);//读取温度传感器的高8位数据
DataL = MPU6050_ReadReg(MPU6050_TEMP_OUT_L);//读取温度传感器的低8位数据
*Temp = (DataH << 8) | DataL;//数据拼接,通过输出参数返回
}
MPU6050.h文件:
#ifndef __MPU6050_H
#define __MPU6050_H
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);
void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ,
int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ, int16_t *Temp);
#endif
MPU6050_Reg.h文件:
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H
#defineMPU6050_SMPLRT_DIV0x19
#defineMPU6050_CONFIG0x1A
#defineMPU6050_GYRO_CONFIG0x1B
#defineMPU6050_ACCEL_CONFIG0x1C
#defineMPU6050_ACCEL_XOUT_H0x3B
#defineMPU6050_ACCEL_XOUT_L0x3C
#defineMPU6050_ACCEL_YOUT_H0x3D
#defineMPU6050_ACCEL_YOUT_L0x3E
#defineMPU6050_ACCEL_ZOUT_H0x3F
#defineMPU6050_ACCEL_ZOUT_L0x40
#defineMPU6050_TEMP_OUT_H0x41
#defineMPU6050_TEMP_OUT_L0x42
#defineMPU6050_GYRO_XOUT_H0x43
#defineMPU6050_GYRO_XOUT_L0x44
#defineMPU6050_GYRO_YOUT_H0x45
#defineMPU6050_GYRO_YOUT_L0x46
#defineMPU6050_GYRO_ZOUT_H0x47
#defineMPU6050_GYRO_ZOUT_L0x48
#defineMPU6050_PWR_MGMT_10x6B
#defineMPU6050_PWR_MGMT_20x6C
#defineMPU6050_WHO_AM_I0x75
#endif
main.c文件:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"
uint8_t ID;//定义用于存放ID号的变量
int16_t AX, AY, AZ, GX, GY, GZ, TM;//定义用于存放各个数据的变量
int main(void)
{
/*模块初始化*/
OLED_Init();//OLED初始化
MPU6050_Init();//MPU6050初始化
/*显示ID号*/
OLED_ShowString(1, 1, "ID:");//显示静态字符串
ID = MPU6050_GetID();//获取MPU6050的ID号
OLED_ShowHexNum(1, 4, ID, 2);//OLED显示ID号
while (1)
{
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ, &TM);//获取MPU6050的数据
OLED_ShowNum(1,8, (TM/340 + 36.5), 2); //显示温度
OLED_ShowSignedNum(2, 1, AX, 5);//OLED显示数据
OLED_ShowSignedNum(3, 1, AY, 5);
OLED_ShowSignedNum(4, 1, AZ, 5);
OLED_ShowSignedNum(2, 8, GX, 5);
OLED_ShowSignedNum(3, 8, GY, 5);
OLED_ShowSignedNum(4, 8, GZ, 5);
}
}
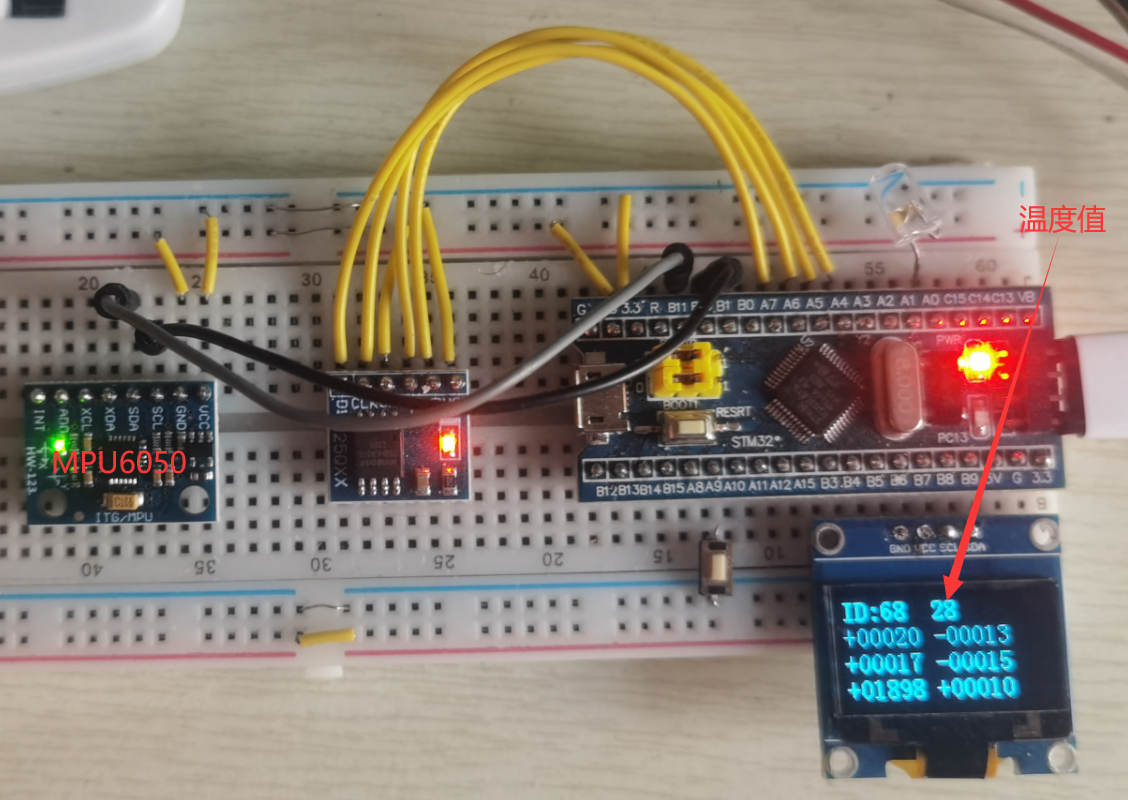
以上文件通过编译后下载到芯片中就能得到如下图的结果了:
原文地址:https://blog.csdn.net/xingyuncao520025/article/details/138020117
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!