FANUC机器人SOCKET连接指令编写
一、创建一个.KL文件编写连接指令
创建一个KL文本来编写FANUC机器人socket连接指令
二、KAREL指令代码
fanuc机器人karel编辑器编辑的karel代码如下:
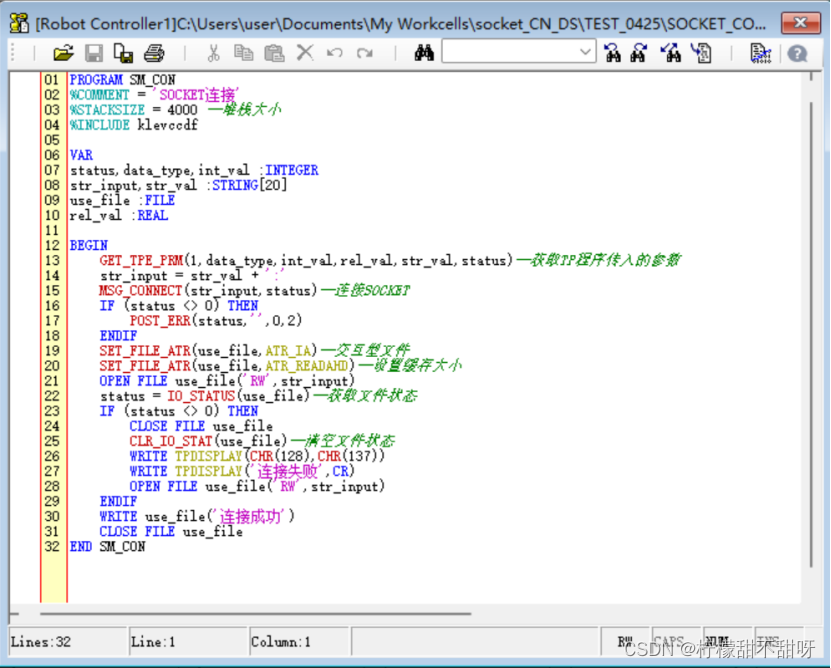
PROGRAM SM_CON
%COMMENT = 'SOCKET连接'
%STACKSIZE = 4000 --堆栈大小
%INCLUDE klevccdf
VAR
status,data_type,int_val :INTEGER
str_input,str_val :STRING[20]
use_file :FILE
rel_val :REAL
BEGIN
GET_TPE_PRM(1,data_type,int_val,rel_val,str_val,status)--获取TP程序传入的参数
str_input = str_val + ':'
MSG_CONNECT(str_input,status)--连接SOCKET
IF (status <> 0) THEN
POST_ERR(status,'',0,2)
ENDIF
SET_FILE_ATR(use_file,ATR_IA)--交互型文件
SET_FILE_ATR(use_file,ATR_READAHD)--设置缓存大小
OPEN FILE use_file('RW',str_input)
status = IO_STATUS(use_file)--获取文件状态
IF (status <> 0) THEN
CLOSE FILE use_file
CLR_IO_STAT(use_file)--清空文件状态
WRITE TPDISPLAY(CHR(128),CHR(137))
WRITE TPDISPLAY('连接失败',CR)
OPEN FILE use_file('RW',str_input)
ENDIF
WRITE use_file('连接成功')
CLOSE FILE use_file
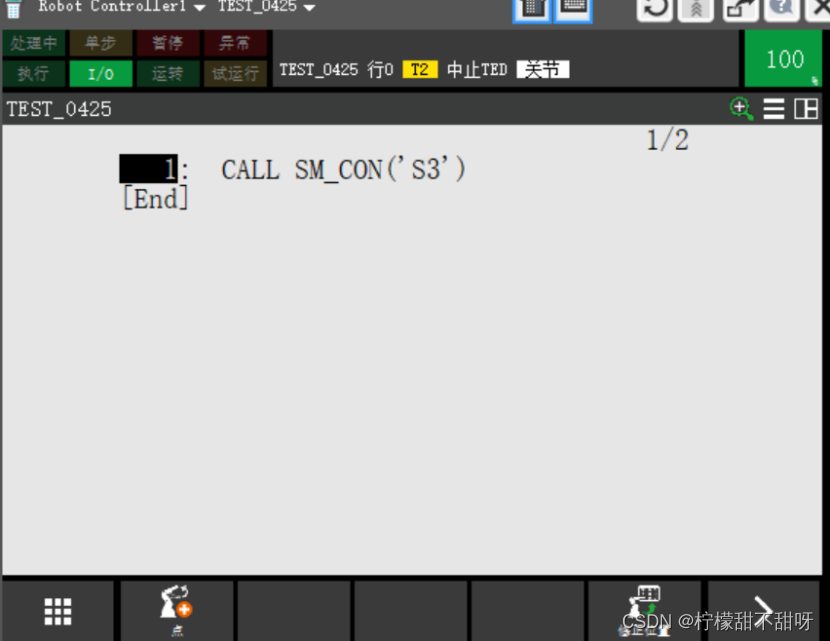
END SM_CON三、测试SOCKET通讯
在机器人示教器上创建一个TP程序,调用KAREL程序,传入需要连接的服务器/客户端的端口,测试连接,下图用服务器端口S3测试。
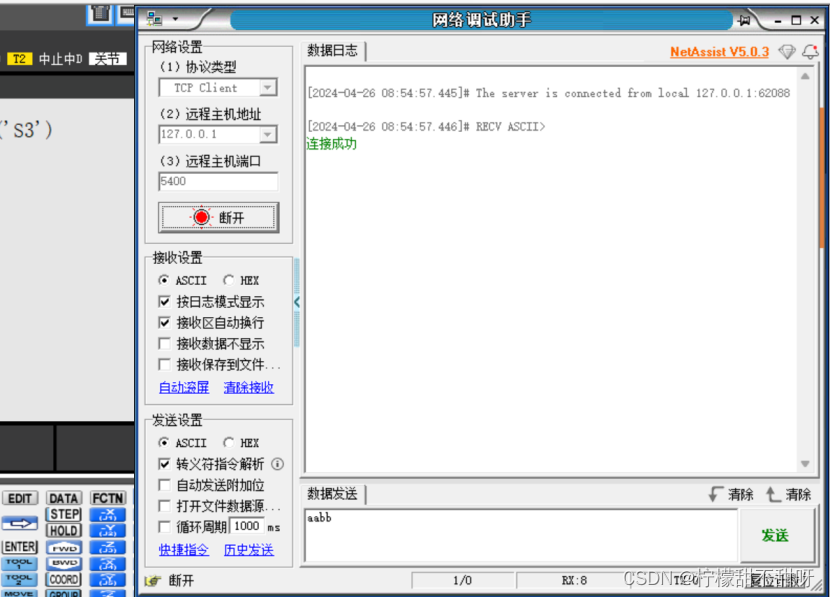
运行改程序测试SOCKET通讯,连接成功后机器人会向调试助手发送通讯成功的提示
原文地址:https://blog.csdn.net/A567852/article/details/138204989
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!