大陆ARS548使用记录
一、Windows连接上位机
雷达是在深圳路达买的,商家给的资料中首先让配置网口,但我在使用过程中一直出现无法连接上位机的情况。接下来说说我的见解和理解。

1.1遇到的问题
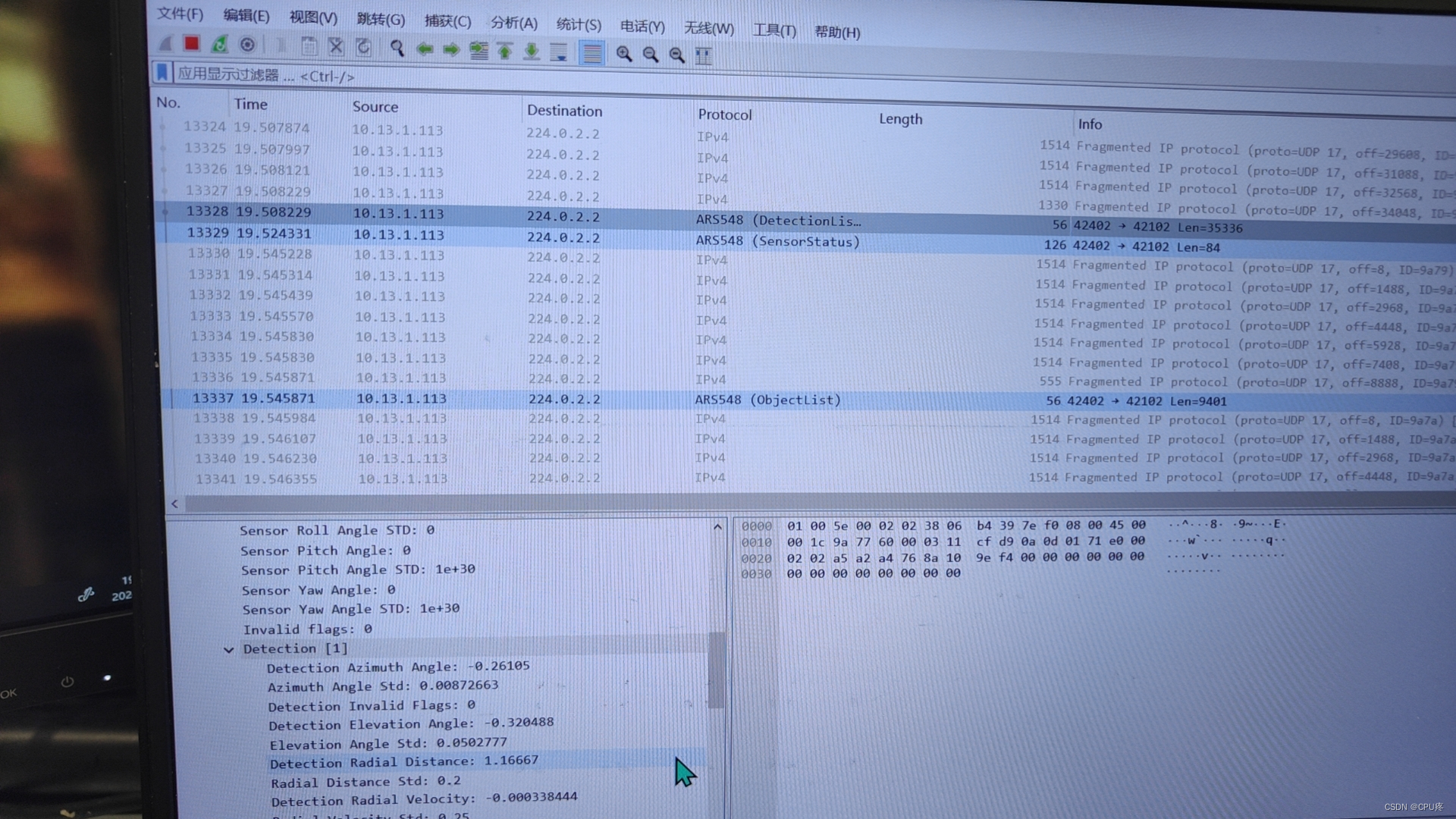
按要求配置好端口后上位机无连接不到雷达,但wireshark可以正常抓到数据包。
1.2尝试的方法
1.2.1 关掉所有防火墙
1.2.2 禁用所有除WIFI外的网络

1.2.3 启用NET4.8服务

厂家给更换了雷达和以太网转换器等配套硬件,最终也无法连接上位机。后来发现每次重启电脑后,可以在开机一两分钟以内连上雷达,只要不断开就可以一直连接。断开后就连不上。

1.3 一些想法
经过一周来的实践,发现网络随便配,也不会影响上位机连接电脑。甚至电脑IP为192.168.**(但在Ubuntu系统中开发,必须按商家的说明配置)的时候,上位机仍可以接收到数据。如果尝试了以上步骤还是无法连接上位机,那就放弃吧。毕竟它只是个可视化的工具。
1.4 一些建议
不管是Windows还是ubuntu,ping不通不代表雷达和电脑未联通!不代表没数据接进来!
1.Windows一定要装wireshark,看看数据是否可以正常输出到电脑。
2.Ubuntu通过 sudo tcpdump -i <网卡名> 检查是否有来自雷达IP的UDP数据。
二、Ubuntu基于ROS开发SDK
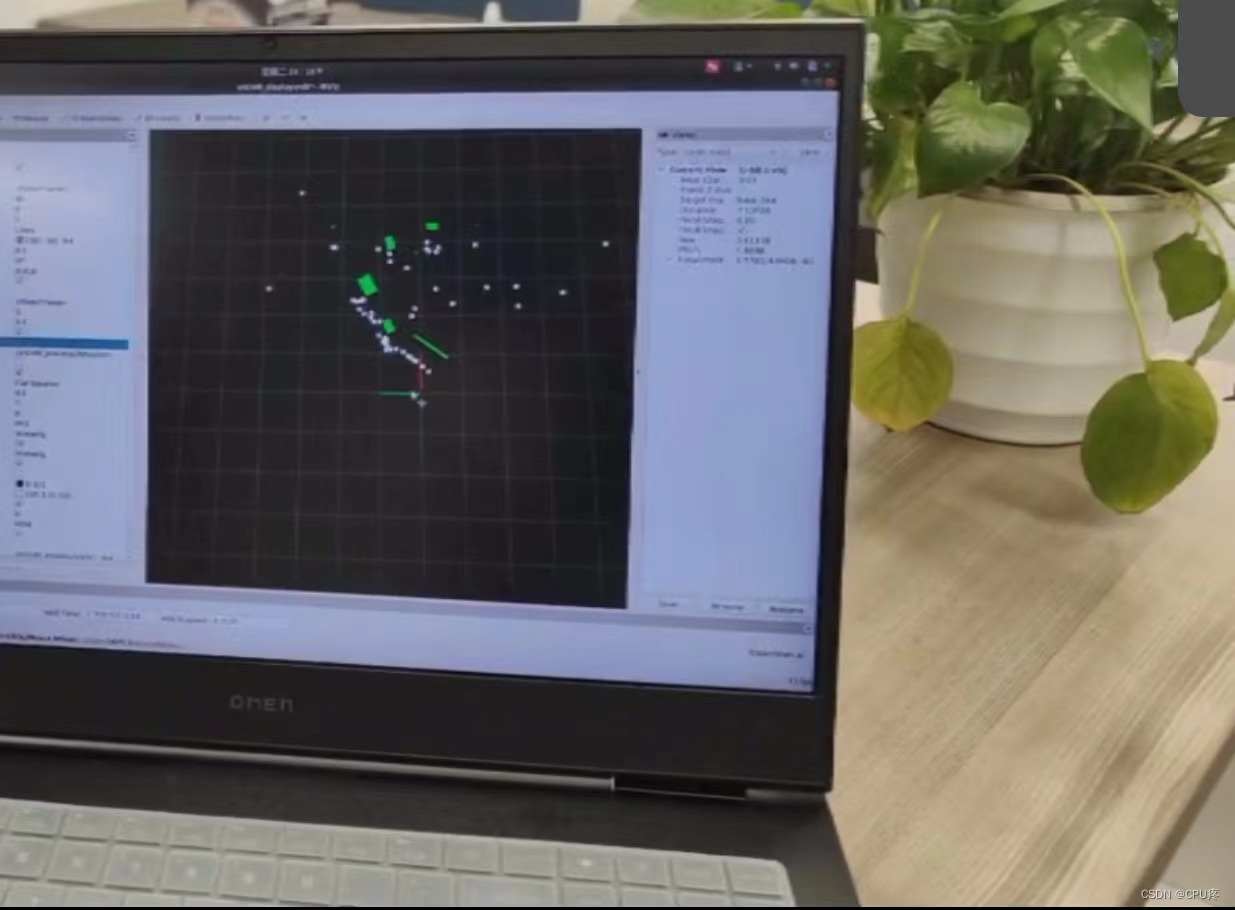
经过一周半的实践与煎熬,终于基于ROS复现了商家提供的上位机的80%以上的功能,包括接入并解析UDP数据,和通过RVIZ可视化它的Detections(点云)和Objects(物体)。欢迎技术交流,微信854572796
原文地址:https://blog.csdn.net/weixin_54424184/article/details/140162711
免责声明:本站文章内容转载自网络资源,如本站内容侵犯了原著者的合法权益,可联系本站删除。更多内容请关注自学内容网(zxcms.com)!